Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
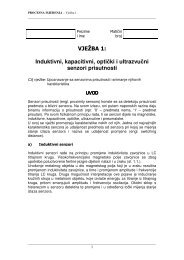
e obtained analyzing fig. 12. This figure shows<br />
comparison <strong>of</strong> Bode plots <strong>of</strong> controllers<br />
designed with different values <strong>of</strong> desired tower<br />
damping D'.<br />
Figure 12: Bode plots <strong>of</strong> input-output pole placement<br />
controllers designed to achieve different values <strong>of</strong><br />
tower damping D'.<br />
From fig. 12 it becomes clear that increased<br />
tower damping results in high pass controller<br />
behavior. This has a consequence <strong>of</strong> increased<br />
pitch activity which in turn results in additional<br />
oscillations and finally cancels out the<br />
advantages <strong>of</strong> proposed design methodology. So<br />
a trade<strong>of</strong>f between desired increase in tower<br />
damping and pitch activity has to be made.<br />
6. Full state feedback controller<br />
The input-output pole placement controller<br />
described in section 5 has shown some<br />
promising results but its ability to damp the<br />
tower oscillations is limited. Key cause for this<br />
is the fact that it doesn't use information about<br />
actual tower oscillations but only rotor speed<br />
feedback. <strong>Damping</strong> <strong>of</strong> tower oscillations by<br />
addition <strong>of</strong> tower top speed feedback to PID<br />
controller is proposed in [1]. <strong>Tower</strong> top speed<br />
measurement can be obtained from tower top<br />
acceleration measured by accelerometers that<br />
are nowadays almost a standard part <strong>of</strong> wind<br />
turbine control system. In our approach we use<br />
slightly different methodology. Instead <strong>of</strong><br />
extended PID controller we use full state<br />
feedback controller designed using pole<br />
placement method. Desired closed loop<br />
behavior is chosen in the same way as for<br />
described pole placement controller. For this<br />
purpose process model (13) has to be rewritten<br />
in the state space form:<br />
x� = A⋅ x+ B⋅u, y = C⋅ x+ D⋅u. (19)<br />
State variables used for system description and<br />
control are rotor speed ω , rotor acceleration<br />
ω� , tower top speed x� t and tower top<br />
acceleration x�� t , while system inputs are wind<br />
speed v w , pitch angle β and generator torque<br />
M g :<br />
⎡ω⎤ ⎢ ⎡ v ⎤ w<br />
� ω<br />
⎥<br />
⎢ ⎥<br />
x = ⎢ ⎥,<br />
u = β<br />
x ⎢ ⎥.<br />
(20)<br />
⎢�⎥ t<br />
⎢ ⎥ ⎢M⎥ g<br />
x ⎣ ⎦<br />
⎣��t ⎦<br />
<strong>Rotor</strong> speed and tower acceleration are<br />
measured variables while other two states are<br />
derived from them. Using Ackermann's formula<br />
[6] vector <strong>of</strong> feedback gains for selected states<br />
can be calculated. System with such a controller<br />
was tested in Bladed using the same wind<br />
stepwise change as in sections 4 and 5.<br />
Simulation results are shown in the figures 13-<br />
15. From these figures it can be seen that full<br />
state feedback controller maintains good rotor<br />
speed regulation while at the same time<br />
achieving better damping <strong>of</strong> the tower<br />
oscillations and practically removing the<br />
oscillatory movement <strong>of</strong> the tower. The pitch<br />
activity in this case increases considerably so a<br />
trade<strong>of</strong>f between tower oscillations' damping and<br />
pitch activity is necessary.<br />
To examine the behavior <strong>of</strong> three described<br />
controllers in more realistic conditions the<br />
system behavior in 3D turbulent wind field was<br />
simulated in Bladed. Further information about<br />
simulations <strong>of</strong> 3D turbulent wind fields can be<br />
found in e.g. [7]. Let's just mention here that<br />
turbulent wind field was generated in Bladed<br />
<strong>Rotor</strong> speed [rpm]<br />
25<br />
24.5<br />
24<br />
23.5<br />
23<br />
22.5<br />
22<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 13: Response <strong>of</strong> rotor speed <strong>of</strong> the system<br />
controlled with full state feedback controller.