Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
From (16) and (17) it follows that pitch<br />
controller has a form <strong>of</strong> :<br />
1 Gw() s −Gm()<br />
s<br />
GPC() s = ⋅ . (18)<br />
G s G () s G () s<br />
( )<br />
SD β<br />
m<br />
It should be noted that the above expression<br />
<strong>of</strong>ten needs to be modified to assure that the<br />
controller is causal. Details on this design<br />
method can be found in [6].<br />
The crucial step in controller design using<br />
described method is the choice <strong>of</strong> model<br />
transfer function Gm. It is important to choose<br />
model transfer that is achievable for the system<br />
in scope and that assures its satisfactory<br />
behavior. One possibility that is very common<br />
in the literature is the use <strong>of</strong> standard forms<br />
such as Butterworth or binomial form.<br />
However, these forms can be rather difficult to<br />
relate to system physical properties. So another<br />
approach is used in this paper. As previously<br />
said our primary goal is the reduction <strong>of</strong> tower<br />
oscillations. <strong>Tower</strong> oscillations can be reduced<br />
if the tower modal damping increases what<br />
would require change in tower structural<br />
parameters such as mass and stiffness<br />
distributions. Our goal is to achieve similar<br />
increase <strong>of</strong> tower damping by means <strong>of</strong> pitch<br />
controller actions without change in tower<br />
structural parameters. In that sense as a<br />
controller design objective we set a desired<br />
increase <strong>of</strong> tower modal damping. In other<br />
words tower modal damping D in the last<br />
expression in (13) is replaced with desired<br />
modal damping D' thus forming system model<br />
with new set <strong>of</strong> parameters. This model is<br />
linearised and transfer functions (14) and (15)<br />
are calculated. Using calculated transfer<br />
functions PID controller is designed following<br />
the guidelines described in section 4. Having<br />
the controller designed it is possible to calculate<br />
closed loop transfer function (16). This closed<br />
loop transfer function, obtained using system<br />
with increased damping and PID controller is<br />
then regarded as desired model transfer<br />
functions Gm for the real system. In other words<br />
our goal is to design a controller that assures<br />
that real system behaves as its tower damping<br />
has increased. The system response with Pole<br />
placement controller was simulated in Bladed<br />
using previously described full featured model.<br />
<strong>Wind</strong> used for simulation was the same as in<br />
section 4. Simulation results are given in the<br />
figures 9-11. From these figures it can be seen<br />
that pole placement controller achieves almost<br />
the same regulation <strong>of</strong> rotor speed as PID<br />
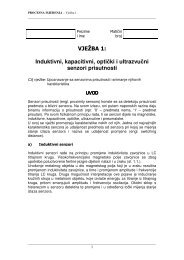
<strong>Rotor</strong> speed [rpm]<br />
25<br />
24.5<br />
24<br />
23.5<br />
23<br />
22.5<br />
22<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 9: Response <strong>of</strong> rotor speed <strong>of</strong> the system<br />
controlled with input-output pole placement<br />
controller.<br />
Pitch angle [deg]<br />
16<br />
15<br />
14<br />
13<br />
12<br />
11<br />
10<br />
9<br />
8<br />
7<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 10: Response <strong>of</strong> pitch angle <strong>of</strong> the system<br />
controlled with input-output pole placement<br />
controller.<br />
<strong>Tower</strong> top displacement [m]<br />
0.12<br />
0.1<br />
0.08<br />
0.06<br />
0.04<br />
0.02<br />
0<br />
-0.02<br />
-0.04<br />
-0.06<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 11: Response <strong>of</strong> tower top displacement <strong>of</strong><br />
the system controlled with input-output pole<br />
placement controller.<br />
controller does. This was to be expected since<br />
the PID controller is the "core" <strong>of</strong> the pole<br />
placement controller design. At the same time<br />
tower oscillations are more damped. Since the<br />
tower structure remains the same this damping<br />
is achieved by higher pitch control activity than<br />
in the case <strong>of</strong> PID controller.<br />
The question that naturally appears is the limit<br />
to which extend the tower oscillations can be<br />
damped in this way. Answer to this question can