Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Wind</strong> speed [m/s]<br />
18<br />
17<br />
16<br />
15<br />
14<br />
13<br />
12<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 4: <strong>Wind</strong> speed used for simulation in Bladed.<br />
<strong>Rotor</strong> speed [rpm]<br />
25<br />
24.5<br />
24<br />
23.5<br />
23<br />
22.5<br />
22<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 5: Response <strong>of</strong> rotor speed <strong>of</strong> the system<br />
controlled with PID controller.<br />
Pitch angle [deg]<br />
16<br />
15<br />
14<br />
13<br />
12<br />
11<br />
10<br />
9<br />
8<br />
7<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 6: Response <strong>of</strong> pitch angle <strong>of</strong> the system<br />
controlled with PID controller.<br />
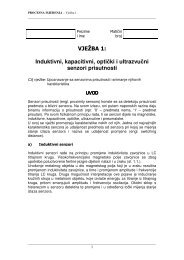
<strong>Tower</strong> top displacement [m]<br />
0.12<br />
0.1<br />
0.08<br />
0.06<br />
0.04<br />
0.02<br />
0<br />
-0.02<br />
-0.04<br />
-0.06<br />
-0.08<br />
0 10 20 30 40 50 60 70<br />
t [s]<br />
Figure 7: Response <strong>of</strong> tower top displacement <strong>of</strong> the<br />
system controlled with PID controller.<br />
While rotor speed and pitch angle behavior is<br />
satisfactory, attention should be paid to the<br />
tower top oscillations shown in fig. 7. It can be<br />
observed that tower top experiences lightly<br />
damped oscillatory behavior. These lasting<br />
oscillations, although small in magnitude,<br />
contribute to material fatigue and can lead to<br />
structure premature failure. So in the following<br />
sections two methods for controller design that<br />
aim at reduction <strong>of</strong> tower top oscillations are<br />
proposed.<br />
5. Input-output pole placement<br />
controller<br />
In this section the pitch controller with inputoutput<br />
structure is designed using well known<br />
pole placement method [6]. As design objective<br />
in this method the desired behavior <strong>of</strong> the<br />
closed loop system has to be chosen. The pitch<br />
controller GPC is then designed to assure that<br />
closed loop system behaves in the chosen<br />
manner. Transfer functions (14) and (15) form<br />
the linearised wind turbine model that can be<br />
described with the principle scheme shown in<br />
fig. 8.<br />
Figure 8: Principle scheme <strong>of</strong> the linearised wind<br />
turbine model.<br />
From the principle scheme given in fig. 8 closed<br />
loop transfer function with respect to wind<br />
speed change can be derived:<br />
G<br />
CL_ w<br />
Δω()<br />
s<br />
Gw() s<br />
= =<br />
. (16)<br />
Δ v () s 1 + G () s G s G () s<br />
w CL PC SD<br />
( )<br />
The pitch controller GPC has to assure that<br />
closed loop transfer function (16) is equal to the<br />
chosen model transfer function Gm:<br />
( ) !<br />
G s = G () s . (17)<br />
CL _ w m<br />
β