Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...
Damping of Wind Turbine Tower Oscillations through Rotor Speed ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
transition to Laplace domain simple algebraic<br />
manipulations yield transfer functions that are<br />
needed for controller design. Those transfer<br />
functions are:<br />
and<br />
( )<br />
G s<br />
β<br />
w<br />
( )<br />
G s<br />
Δω<br />
=<br />
Δβ<br />
w<br />
( s)<br />
( s)<br />
( s)<br />
( )<br />
Δω<br />
=<br />
Δv<br />
s<br />
(14)<br />
. (15)<br />
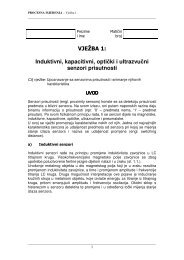
These transfer functions are <strong>of</strong> the third order.<br />
A good insight in system properties <strong>of</strong> the<br />
wind turbine can be gained if we examine<br />
frequency characteristics <strong>of</strong> transfer function<br />
(14) shown in fig. 3.<br />
Figure 3: Frequency characteristics <strong>of</strong> G β .<br />
It can be observed that frequency<br />
characteristics <strong>of</strong> transfer function (14) at<br />
tower modal frequency exhibits magnitude and<br />
phase drop. Similar phenomena are present in<br />
frequency characteristics <strong>of</strong> (15) as well. This<br />
fact makes the pitch controller design very<br />
difficult. Physical explanation for observed<br />
effects becomes clear from the following<br />
analysis. Change in wind speed causes change<br />
in rotor speed what requires controller action<br />
and pitching <strong>of</strong> the blades in order to regulate<br />
the rotor speed to its rated value. Pitching the<br />
rotor blades, besides the aerodynamic torque,<br />
alters the thrust force significantly. Thrust<br />
force, according to (13), causes change in wind<br />
turbine tower top speed and thus the wind<br />
speed seen by the rotor is changed. This alters<br />
the aerodynamic conversion and in this way a<br />
feedback is formed. For this reason wind<br />
turbine can easily be driven into oscillatory<br />
behavior if the pitch controller is not designed<br />
properly.<br />
To prevent the pitch controller from driving the<br />
wind turbine into oscillatory behavior it must be<br />
assured that system frequency bandwidth is<br />
below the first tower modal frequency.<br />
Moreover, sufficiently small magnitude is<br />
required at the first modal frequency. As it can<br />
be seen from fig. 3. the first modal frequency <strong>of</strong><br />
the turbine in scope is 3 rad/s so a bandwidth <strong>of</strong><br />
1 rad/s was chosen. PID controller was designed<br />
to assure phase margin <strong>of</strong> around 60 o what gives<br />
satisfactory behavior <strong>of</strong> the system.<br />
To fully explore the system behavior with<br />
chosen controller simulation tool GH Bladed<br />
was used. GH Bladed is pr<strong>of</strong>essional simulation<br />
package designed for wind turbine simulations<br />
and load calculations [5]. It relies upon very<br />
complex mathematical model based on<br />
combined blade element and momentum theory<br />
[1]. Structural properties <strong>of</strong> the wind turbine are<br />
modeled in detail and inertial and gravitational<br />
loads are taken into account along with<br />
aerodynamic ones. Extensive testing showed<br />
that simulation results obtained in Bladed are in<br />
accordance with measurements taken on actual<br />
wind turbines what was recognized by major<br />
standardization and certification institutions<br />
(e.g. Germanischer Llyod).<br />
To model the structural properties <strong>of</strong> explored<br />
turbine many modes are used [5]. <strong>Tower</strong><br />
nodding is modeled with two modes as well as<br />
tower naying (tower side-side motion). <strong>Rotor</strong><br />
blades' motion in flapwise direction is modeled<br />
with 6 modal frequencies while blades' motion<br />
in edgewise direction (displacement <strong>of</strong> the rotor<br />
blades in the plane <strong>of</strong> rotation) is modeled with<br />
5 modal frequencies. <strong>Wind</strong> shear and tower<br />
shadow are included in the model as well. PID<br />
controller designed based on linearised model<br />
(14) and (15) was implemented in C and<br />
included as external discrete time controller. In<br />
that way we could use Bladed for controller<br />
testing.<br />
In the following figures behavior <strong>of</strong> the system<br />
when PID controller is used for rotor speed<br />
control is shown for one representative<br />
operating point ( v w = 15 m/s). <strong>Wind</strong> that was<br />
used for simulation observed positive and<br />
negative stepwise change shown in fig. 4.<br />
Responses <strong>of</strong> rotor speed, pitch angle and tower<br />
top displacement are shown in figs. 5. 6. and 7.<br />
respectively. From these figures it can be seen<br />
that rotor speed is well regulated and quickly<br />
compensated for the influences <strong>of</strong> wind speed<br />
changes. The pitch control actions are moderate<br />
without any oscillations. Similar results were<br />
obtained for all operating points <strong>through</strong>out<br />
wind turbine operating range.