4569846498
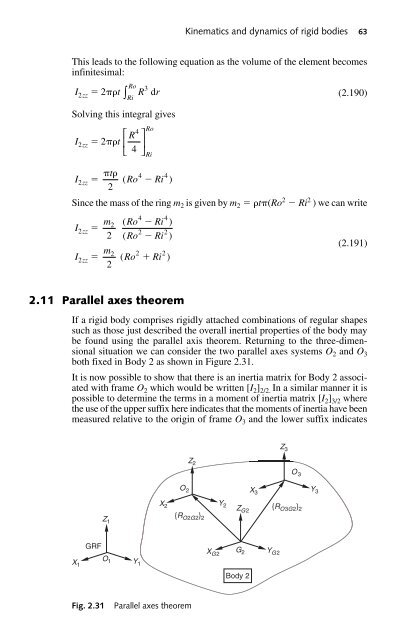
Kinematics and dynamics of rigid bodies 63 This leads to the following equation as the volume of the element becomes infinitesimal: Solving this integral gives I 2zz I (2.190) Since the mass of the ring m 2 is given by m 2 t(Ro 2 Ri 2 ) we can write I 2zz I 2zz 2zz Ro 3 I2zz 2 t∫ R dr Ri 4 R 2 t ⎡ ⎣ ⎢ ⎤ ⎥ 4 ⎦ Ro Ri t 4 4 Ro Ri 2 ( ) 4 4 m2 ( Ro Ri ) 2 2 2 ( Ro Ri ) m2 Ro 2 Ri 2 2 ( ) (2.191) 2.11 Parallel axes theorem If a rigid body comprises rigidly attached combinations of regular shapes such as those just described the overall inertial properties of the body may be found using the parallel axis theorem. Returning to the three-dimensional situation we can consider the two parallel axes systems O 2 and O 3 both fixed in Body 2 as shown in Figure 2.31. It is now possible to show that there is an inertia matrix for Body 2 associated with frame O 2 which would be written [I 2 ] 2/2. In a similar manner it is possible to determine the terms in a moment of inertia matrix [I 2 ] 3/2 where the use of the upper suffix here indicates that the moments of inertia have been measured relative to the origin of frame O 3 and the lower suffix indicates Z 3 Z 2 X 3 O 3 Y 3 O 2 X 2 Y 2 Z G2 {R O3G2 } 2 Z {R O2G2 } 2 1 GRF X 1 O 1 Y 1 X G2 G 2 Y G2 Body 2 Fig. 2.31 Parallel axes theorem
64 Multibody Systems Approach to Vehicle Dynamics that the terms in the matrix are transformed to frame O 2. Since O 2 and O 3 are parallel the matrix [I 2 ] 3/3 would be identical to [I 2 ] 3/2. The positions of the frames O 2 and O 3 relative to G 2 , the mass centre of Body 2, can be given by ⎡x2 ⎤ { RO2G2} 2 ⎢ y ⎥ ⎢ 2 ⎥ , { RO G} ⎣⎢ z2 ⎦⎥ (2.192) where according to the triangle law of vector addition if a, b and c are the components of the relative position vector {R O3O2 } 2 we can write ⎡a⎤ { RO O} ⎢ b ⎥ , { RO G} ⎢ ⎥ ⎣⎢ c⎦⎥ 3 2 2 3 2 2 (2.193) On this basis it is possible to relate a moment of inertia, for example I 2 x 3 x 3 for frame O 3 to I 2 x 2 x 2 for frame O 2 : ∫ ∫ ∫ 2 2 3 3 3 Ixx ( y z) dm [( y b) ( z c) ] dm [( y2 2 y2bb ) ( z2 2 z2cc )] dm 2 2 Ixx 2 2 2 2 b∫ y2 d m2 c∫ z2 d m( b c ) m 2 2 I x x 2 m ( by cz ) m ( b c ) (2.194) If we take the situation where O 2 is coincident with G 2 , the mass centre of Body 2, such that x 2 , y 2 and z 2 are zero, then (2.194) can be simplified to I 2 x 3 x 3 I 2 x 2 x 2 m 2 (b 2 c 2 ) (2.195) In a similar manner it is possible to relate a product of inertia, for example I 2 y 3 z 3 for frame O 3 to I 2 y 2 z 2 for frame O 2 : ∫ ∫ ∫ 2 2 Iyz yz dm 2 3 3 3 3 2 3 2 ( y b)( z c) dm 2 2 3 2 2 2 2 ⎡x3⎤ ⎢ y ⎥ ⎢ 3⎥ ⎣⎢ z3 ⎦⎥ ⎡x ⎢ ⎢ y ⎣⎢ z 2 2 2 2 2 2 2 y2z2 cy2 bz2 bc dm I y z m ( cy bz ) m bc 2 2 2 2 2 2 2 2 2 2 2 a⎤ b ⎥ ⎥ c⎦⎥ 2 (2.196) Taking again O 2 to lie at the mass centre G 2 we can simplify (2.196) to I 2 y 3 z 3 I 2 y 2 z 2 m 2 bc (2.197) On the basis of the derivation of the relationships in (2.195) and (2.197) we can find in a similar manner the full relationship between [I 2 ] 3/2 and [I 2 ] 2/2 to be 2 2 [ I ] / [ I ] / m 2 3 2 2 2 2 2 2 2 ⎡b c ab ac ⎤ ⎢ 2 2 ⎥ ⎢ ab c a bc ⎥ ⎢ 2 2 ⎣ ac bc a b ⎥ ⎦ (2.198)
- Page 36 and 37: Introduction 13 Decomposition: Synt
- Page 38 and 39: Introduction 15 The best multibody
- Page 40 and 41: Introduction 17 shows good correlat
- Page 42 and 43: Introduction 19 generated in numeri
- Page 44 and 45: Introduction 21 1.9 Benchmarking ex
- Page 46 and 47: 2 Kinematics and dynamics of rigid
- Page 48 and 49: Kinematics and dynamics of rigid bo
- Page 50 and 51: Kinematics and dynamics of rigid bo
- Page 52 and 53: Kinematics and dynamics of rigid bo
- Page 54 and 55: Kinematics and dynamics of rigid bo
- Page 56 and 57: Kinematics and dynamics of rigid bo
- Page 58 and 59: Kinematics and dynamics of rigid bo
- Page 60 and 61: Kinematics and dynamics of rigid bo
- Page 62 and 63: Kinematics and dynamics of rigid bo
- Page 64 and 65: Kinematics and dynamics of rigid bo
- Page 66 and 67: Kinematics and dynamics of rigid bo
- Page 68 and 69: Kinematics and dynamics of rigid bo
- Page 70 and 71: Kinematics and dynamics of rigid bo
- Page 72 and 73: Kinematics and dynamics of rigid bo
- Page 74 and 75: Kinematics and dynamics of rigid bo
- Page 76 and 77: Kinematics and dynamics of rigid bo
- Page 78 and 79: Kinematics and dynamics of rigid bo
- Page 80 and 81: Kinematics and dynamics of rigid bo
- Page 82 and 83: Kinematics and dynamics of rigid bo
- Page 84 and 85: Kinematics and dynamics of rigid bo
- Page 88 and 89: Kinematics and dynamics of rigid bo
- Page 90 and 91: Kinematics and dynamics of rigid bo
- Page 92 and 93: Kinematics and dynamics of rigid bo
- Page 94 and 95: Kinematics and dynamics of rigid bo
- Page 96 and 97: Kinematics and dynamics of rigid bo
- Page 98 and 99: 3 Multibody systems simulation soft
- Page 100 and 101: Multibody systems simulation softwa
- Page 102 and 103: Multibody systems simulation softwa
- Page 104 and 105: Multibody systems simulation softwa
- Page 106 and 107: Multibody systems simulation softwa
- Page 108 and 109: Multibody systems simulation softwa
- Page 110 and 111: Multibody systems simulation softwa
- Page 112 and 113: Multibody systems simulation softwa
- Page 114 and 115: Multibody systems simulation softwa
- Page 116 and 117: Multibody systems simulation softwa
- Page 118 and 119: Multibody systems simulation softwa
- Page 120 and 121: Multibody systems simulation softwa
- Page 122 and 123: Multibody systems simulation softwa
- Page 124 and 125: Multibody systems simulation softwa
- Page 126 and 127: Multibody systems simulation softwa
- Page 128 and 129: Multibody systems simulation softwa
- Page 130 and 131: Multibody systems simulation softwa
- Page 132 and 133: Multibody systems simulation softwa
- Page 134 and 135: Multibody systems simulation softwa
Kinematics and dynamics of rigid bodies 63<br />
This leads to the following equation as the volume of the element becomes<br />
infinitesimal:<br />
Solving this integral gives<br />
I<br />
2zz<br />
I<br />
(2.190)<br />
Since the mass of the ring m 2 is given by m 2 t(Ro 2 Ri 2 ) we can write<br />
I<br />
2zz<br />
I<br />
2zz<br />
2zz<br />
Ro<br />
3<br />
I2zz<br />
2 t∫<br />
R dr<br />
Ri<br />
4<br />
R<br />
2<br />
t<br />
⎡ ⎣ ⎢<br />
⎤<br />
⎥<br />
4 ⎦<br />
Ro<br />
Ri<br />
t 4 4<br />
Ro Ri<br />
2 ( )<br />
4 4<br />
m2<br />
( Ro Ri )<br />
<br />
2 2<br />
2 ( Ro Ri )<br />
m2 Ro<br />
2 Ri<br />
2<br />
<br />
2 ( )<br />
(2.191)<br />
2.11 Parallel axes theorem<br />
If a rigid body comprises rigidly attached combinations of regular shapes<br />
such as those just described the overall inertial properties of the body may<br />
be found using the parallel axis theorem. Returning to the three-dimensional<br />
situation we can consider the two parallel axes systems O 2 and O 3<br />
both fixed in Body 2 as shown in Figure 2.31.<br />
It is now possible to show that there is an inertia matrix for Body 2 associated<br />
with frame O 2 which would be written [I 2 ] 2/2. In a similar manner it is<br />
possible to determine the terms in a moment of inertia matrix [I 2 ] 3/2 where<br />
the use of the upper suffix here indicates that the moments of inertia have been<br />
measured relative to the origin of frame O 3 and the lower suffix indicates<br />
Z 3<br />
Z 2<br />
X 3<br />
O 3<br />
Y 3<br />
O 2<br />
X 2 Y 2<br />
Z G2<br />
{R O3G2 } 2<br />
Z<br />
{R O2G2 } 2 1<br />
GRF<br />
X 1<br />
O 1<br />
Y 1<br />
X G2<br />
G 2<br />
Y G2<br />
Body 2<br />
Fig. 2.31<br />
Parallel axes theorem


