4569846498
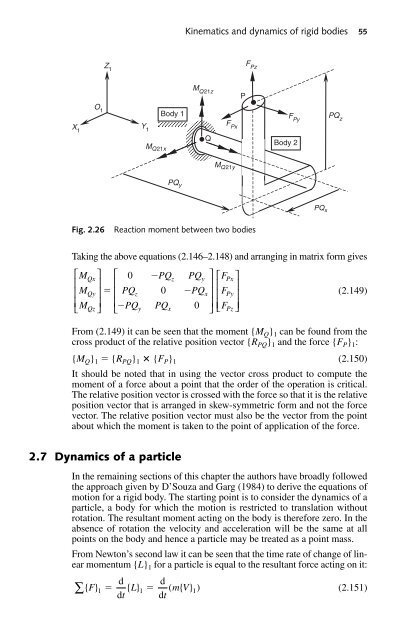
Kinematics and dynamics of rigid bodies 55 F Pz Z 1 M Q21z P O 1 Body 1 F Py X 1 Y F 1 Px Q M Body 2 Q21x M Q21y PQ z PQ y PQ x Fig. 2.26 Reaction moment between two bodies Taking the above equations (2.146–2.148) and arranging in matrix form gives ⎡M ⎢ ⎢M ⎢ ⎣M Qx Qy Qz ⎤ ⎡ 0 ⎥ ⎢ ⎥ ⎢ PQz ⎥ ⎢ ⎦ ⎣ PQ y PQz 0 PQ x PQy PQ 0 x ⎤ ⎡F ⎥ ⎢ ⎥ ⎢ F ⎥ ⎦ ⎣⎢ F (2.149) From (2.149) it can be seen that the moment {M Q } 1 can be found from the cross product of the relative position vector {R PQ } 1 and the force {F P } 1 : {M Q } 1 {R PQ } 1 {F P } 1 (2.150) It should be noted that in using the vector cross product to compute the moment of a force about a point that the order of the operation is critical. The relative position vector is crossed with the force so that it is the relative position vector that is arranged in skew-symmetric form and not the force vector. The relative position vector must also be the vector from the point about which the moment is taken to the point of application of the force. Px Py Pz ⎤ ⎥ ⎥ ⎦⎥ 2.7 Dynamics of a particle In the remaining sections of this chapter the authors have broadly followed the approach given by D’Souza and Garg (1984) to derive the equations of motion for a rigid body. The starting point is to consider the dynamics of a particle, a body for which the motion is restricted to translation without rotation. The resultant moment acting on the body is therefore zero. In the absence of rotation the velocity and acceleration will be the same at all points on the body and hence a particle may be treated as a point mass. From Newton’s second law it can be seen that the time rate of change of linear momentum {L} 1 for a particle is equal to the resultant force acting on it: d d ∑{} F 1 {} L 1 mV {} 1 (2.151) dt d t ( )
56 Multibody Systems Approach to Vehicle Dynamics The resultant force is represented by the vector {F} 1 , m is the mass and {V} 1 is the velocity vector measured relative to an inertial reference frame O 1 . The linear momentum of the body is m{V} 1 . The components of the vectors in (2.151) are all resolved parallel to the axes of O 1 . Taking the mass to be constant (2.151) may be written as ∑ d {} F m {} V m{} A d t 1 1 1 (2.152) The accelerations in (2.152) are also measured relative to the inertial reference frame O 1 . Since the velocities and accelerations used here are measured relative to a non-moving frame we refer to them as absolute. Expanding the vector equation given in (2.152) gives ⎡Fx ⎤ ⎡Ax ⎤ ⎢ F ⎥ y m ⎢ A ⎥ ∑ ⎢ ⎥ ⎢ y ⎥ ⎣⎢ Fz ⎦⎥ ⎣⎢ Az ⎦⎥ (2.153) 2.8 Linear momentum of a rigid body As a body translates and rotates in space it will have linear momentum {L} 1 associated with translation and angular momentum {H} 1 associated with rotation. For the rigid body, Body 2, shown in Figure 2.27 the mass centre is located at G 2 by the vector {R G2 } 1 relative to the reference frame O 2 . A small element of material with a volume V is located at P relative to O 2 by the position vector {R P } 1 . Assuming Body 2 to be of uniform density , we can say that the element of material has a mass m given by m V (2.154) and that as the element becomes infinitesimal the mass of the body m 2 is given by ∫ m2 d V d m vol ∫ vol (2.155) GRF Z 1 X 1 O 1 Y 1 {V P } 1 P δV {R P } 1 Z 2 Body 2 G 2 O 2 {R G2 } 1 Y X 2 2 {ω 2 } 1 Fig. 2.27 Linear momentum of a rigid body
- Page 28 and 29: Introduction 5 Fig. 1.4 Linearity:
- Page 30 and 31: Introduction 7 While apparently a s
- Page 32 and 33: Introduction 9 3. The body yaws (ro
- Page 34 and 35: Introduction 11 Aspiration Definiti
- Page 36 and 37: Introduction 13 Decomposition: Synt
- Page 38 and 39: Introduction 15 The best multibody
- Page 40 and 41: Introduction 17 shows good correlat
- Page 42 and 43: Introduction 19 generated in numeri
- Page 44 and 45: Introduction 21 1.9 Benchmarking ex
- Page 46 and 47: 2 Kinematics and dynamics of rigid
- Page 48 and 49: Kinematics and dynamics of rigid bo
- Page 50 and 51: Kinematics and dynamics of rigid bo
- Page 52 and 53: Kinematics and dynamics of rigid bo
- Page 54 and 55: Kinematics and dynamics of rigid bo
- Page 56 and 57: Kinematics and dynamics of rigid bo
- Page 58 and 59: Kinematics and dynamics of rigid bo
- Page 60 and 61: Kinematics and dynamics of rigid bo
- Page 62 and 63: Kinematics and dynamics of rigid bo
- Page 64 and 65: Kinematics and dynamics of rigid bo
- Page 66 and 67: Kinematics and dynamics of rigid bo
- Page 68 and 69: Kinematics and dynamics of rigid bo
- Page 70 and 71: Kinematics and dynamics of rigid bo
- Page 72 and 73: Kinematics and dynamics of rigid bo
- Page 74 and 75: Kinematics and dynamics of rigid bo
- Page 76 and 77: Kinematics and dynamics of rigid bo
- Page 80 and 81: Kinematics and dynamics of rigid bo
- Page 82 and 83: Kinematics and dynamics of rigid bo
- Page 84 and 85: Kinematics and dynamics of rigid bo
- Page 86 and 87: Kinematics and dynamics of rigid bo
- Page 88 and 89: Kinematics and dynamics of rigid bo
- Page 90 and 91: Kinematics and dynamics of rigid bo
- Page 92 and 93: Kinematics and dynamics of rigid bo
- Page 94 and 95: Kinematics and dynamics of rigid bo
- Page 96 and 97: Kinematics and dynamics of rigid bo
- Page 98 and 99: 3 Multibody systems simulation soft
- Page 100 and 101: Multibody systems simulation softwa
- Page 102 and 103: Multibody systems simulation softwa
- Page 104 and 105: Multibody systems simulation softwa
- Page 106 and 107: Multibody systems simulation softwa
- Page 108 and 109: Multibody systems simulation softwa
- Page 110 and 111: Multibody systems simulation softwa
- Page 112 and 113: Multibody systems simulation softwa
- Page 114 and 115: Multibody systems simulation softwa
- Page 116 and 117: Multibody systems simulation softwa
- Page 118 and 119: Multibody systems simulation softwa
- Page 120 and 121: Multibody systems simulation softwa
- Page 122 and 123: Multibody systems simulation softwa
- Page 124 and 125: Multibody systems simulation softwa
- Page 126 and 127: Multibody systems simulation softwa
Kinematics and dynamics of rigid bodies 55<br />
F Pz<br />
Z 1<br />
M Q21z<br />
P<br />
O 1<br />
Body 1<br />
F Py<br />
X 1<br />
Y F 1 Px<br />
Q<br />
M<br />
Body 2<br />
Q21x<br />
M Q21y<br />
PQ z<br />
PQ y<br />
PQ x<br />
Fig. 2.26<br />
Reaction moment between two bodies<br />
Taking the above equations (2.146–2.148) and arranging in matrix form gives<br />
⎡M<br />
⎢<br />
⎢M<br />
⎢<br />
⎣M<br />
Qx<br />
Qy<br />
Qz<br />
⎤ ⎡ 0<br />
⎥ ⎢<br />
⎥ ⎢ PQz<br />
⎥ ⎢<br />
⎦ ⎣<br />
PQ<br />
y<br />
PQz<br />
0<br />
PQ<br />
x<br />
PQy<br />
PQ<br />
0<br />
x<br />
⎤ ⎡F<br />
⎥ ⎢<br />
⎥ ⎢<br />
F<br />
⎥<br />
⎦ ⎣⎢<br />
F<br />
(2.149)<br />
From (2.149) it can be seen that the moment {M Q } 1 can be found from the<br />
cross product of the relative position vector {R PQ } 1 and the force {F P } 1 :<br />
{M Q } 1 {R PQ } 1 {F P } 1 (2.150)<br />
It should be noted that in using the vector cross product to compute the<br />
moment of a force about a point that the order of the operation is critical.<br />
The relative position vector is crossed with the force so that it is the relative<br />
position vector that is arranged in skew-symmetric form and not the force<br />
vector. The relative position vector must also be the vector from the point<br />
about which the moment is taken to the point of application of the force.<br />
Px<br />
Py<br />
Pz<br />
⎤<br />
⎥<br />
⎥<br />
⎦⎥<br />
2.7 Dynamics of a particle<br />
In the remaining sections of this chapter the authors have broadly followed<br />
the approach given by D’Souza and Garg (1984) to derive the equations of<br />
motion for a rigid body. The starting point is to consider the dynamics of a<br />
particle, a body for which the motion is restricted to translation without<br />
rotation. The resultant moment acting on the body is therefore zero. In the<br />
absence of rotation the velocity and acceleration will be the same at all<br />
points on the body and hence a particle may be treated as a point mass.<br />
From Newton’s second law it can be seen that the time rate of change of linear<br />
momentum {L} 1 for a particle is equal to the resultant force acting on it:<br />
d d<br />
∑{} F 1 {} L 1 mV {} 1<br />
(2.151)<br />
dt<br />
d t<br />
( )


