4569846498
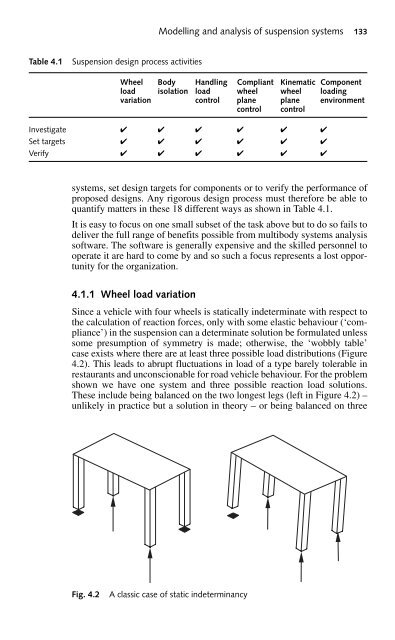
Modelling and analysis of suspension systems 133 Table 4.1 Suspension design process activities Wheel Body Handling Compliant Kinematic Component load isolation load wheel wheel loading variation control plane plane environment control control Investigate ✔ ✔ ✔ ✔ ✔ ✔ Set targets ✔ ✔ ✔ ✔ ✔ ✔ Verify ✔ ✔ ✔ ✔ ✔ ✔ systems, set design targets for components or to verify the performance of proposed designs. Any rigorous design process must therefore be able to quantify matters in these 18 different ways as shown in Table 4.1. It is easy to focus on one small subset of the task above but to do so fails to deliver the full range of benefits possible from multibody systems analysis software. The software is generally expensive and the skilled personnel to operate it are hard to come by and so such a focus represents a lost opportunity for the organization. 4.1.1 Wheel load variation Since a vehicle with four wheels is statically indeterminate with respect to the calculation of reaction forces, only with some elastic behaviour (‘compliance’) in the suspension can a determinate solution be formulated unless some presumption of symmetry is made; otherwise, the ‘wobbly table’ case exists where there are at least three possible load distributions (Figure 4.2). This leads to abrupt fluctuations in load of a type barely tolerable in restaurants and unconscionable for road vehicle behaviour. For the problem shown we have one system and three possible reaction load solutions. These include being balanced on the two longest legs (left in Figure 4.2) – unlikely in practice but a solution in theory – or being balanced on three Fig. 4.2 A classic case of static indeterminancy
134 Multibody Systems Approach to Vehicle Dynamics Yaw velocity (rad/s) 43.0 38.7 34.4 30.1 25.8 21.5 17.2 12.9 8.6 4.3 0.0 0.3 0.0 legs (right in Figure 4.2) in one of two stable states. This system represents a classic case of static indeterminacy. Consideration of a shopping trolley, a notionally rigid vehicle with four wheels that displays many irksome traits, shows that even on the most wellprepared supermarket floor the absence of suspension causes problems with load distribution between the four wheels due to inconsistent manufacture. The least loaded wheel is prone to shimmy and the uneven wheel load distribution can emphasize frictional asymmetry in the castoring joints with even the most fastidious grocery-packing practices, giving the familiar ‘mind of its own’ sensation. Less infuriating ‘rigid’ vehicles include some agricultural equipment that uses compliant behaviour in the tyre sidewalls to accommodate uneven terrain, and racing karts that use a significant amount of compliance in the frame structure of the vehicle to modify vertical wheel loads. An example of this is shown in Figure 4.3 where the inclusion of the racing kart frame flexibility clearly influences the yaw rate response for a simulated manoeuvre. More formally, the problem may be posed as a rigid platform, Body 2, of total weight m 2 {g} 1 , with reactions acting at wheel locations A, B, C and D as shown in Figure 4.4. Consider first the equations that would be needed for equilibrium of forces. Note that for rigour we are continuing with the vector notation established in Chapter 2: ∑{F 2 } 1 {0} 1 (4.1) {F A } 1 {F B } 1 {F C } 1 {F D } 1 m 2 {g} 1 {0} 1 (4.2) ⎡ 0 ⎤ ⎡ 0⎤ ⎡ 0⎤ ⎡ 0 ⎤ ⎡0⎤ ⎡0⎤ ⎢ 0 ⎥ ⎢ 0 ⎥ ⎢ 0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ 0 ⎥ ⎢ ⎥ m ⎢ 2 0 ⎥ ⎢ 0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎣⎢ FAz ⎦⎥ ⎣⎢ FBz ⎦⎥ ⎣⎢ FCz ⎦⎥ ⎣⎢ FDz ⎦⎥ ⎣⎢ g⎦⎥ ⎣⎢ 0⎦⎥ Yaw velocity flexible (4.3) From (4.3) we now get the expression in (4.4) that we would normally get quickly by inspection: rigid 0.9 1.5 2.1 2.7 0.6 1.2 1.8 2.4 3.0 Time (s) Fig. 4.3 The influence of racing kart frame flexibility (provided courtesy of MSC.Software)
- Page 106 and 107: Multibody systems simulation softwa
- Page 108 and 109: Multibody systems simulation softwa
- Page 110 and 111: Multibody systems simulation softwa
- Page 112 and 113: Multibody systems simulation softwa
- Page 114 and 115: Multibody systems simulation softwa
- Page 116 and 117: Multibody systems simulation softwa
- Page 118 and 119: Multibody systems simulation softwa
- Page 120 and 121: Multibody systems simulation softwa
- Page 122 and 123: Multibody systems simulation softwa
- Page 124 and 125: Multibody systems simulation softwa
- Page 126 and 127: Multibody systems simulation softwa
- Page 128 and 129: Multibody systems simulation softwa
- Page 130 and 131: Multibody systems simulation softwa
- Page 132 and 133: Multibody systems simulation softwa
- Page 134 and 135: Multibody systems simulation softwa
- Page 136 and 137: Multibody systems simulation softwa
- Page 138 and 139: Multibody systems simulation softwa
- Page 140 and 141: Multibody systems simulation softwa
- Page 142 and 143: Multibody systems simulation softwa
- Page 144 and 145: Multibody systems simulation softwa
- Page 146 and 147: Multibody systems simulation softwa
- Page 148 and 149: Multibody systems simulation softwa
- Page 150 and 151: Multibody systems simulation softwa
- Page 152 and 153: Multibody systems simulation softwa
- Page 154 and 155: 4 Modelling and analysis of suspens
- Page 158 and 159: Modelling and analysis of suspensio
- Page 160 and 161: Modelling and analysis of suspensio
- Page 162 and 163: Modelling and analysis of suspensio
- Page 164 and 165: Modelling and analysis of suspensio
- Page 166 and 167: Modelling and analysis of suspensio
- Page 168 and 169: Modelling and analysis of suspensio
- Page 170 and 171: Modelling and analysis of suspensio
- Page 172 and 173: Modelling and analysis of suspensio
- Page 174 and 175: Modelling and analysis of suspensio
- Page 176 and 177: Modelling and analysis of suspensio
- Page 178 and 179: Modelling and analysis of suspensio
- Page 180 and 181: Modelling and analysis of suspensio
- Page 182 and 183: Modelling and analysis of suspensio
- Page 184 and 185: Modelling and analysis of suspensio
- Page 186 and 187: Modelling and analysis of suspensio
- Page 188 and 189: Modelling and analysis of suspensio
- Page 190 and 191: Modelling and analysis of suspensio
- Page 192 and 193: Modelling and analysis of suspensio
- Page 194 and 195: Modelling and analysis of suspensio
- Page 196 and 197: Modelling and analysis of suspensio
- Page 198 and 199: Modelling and analysis of suspensio
- Page 200 and 201: Modelling and analysis of suspensio
- Page 202 and 203: Modelling and analysis of suspensio
- Page 204 and 205: Modelling and analysis of suspensio
Modelling and analysis of suspension systems 133<br />
Table 4.1<br />
Suspension design process activities<br />
Wheel Body Handling Compliant Kinematic Component<br />
load isolation load wheel wheel loading<br />
variation control plane plane environment<br />
control control<br />
Investigate ✔ ✔ ✔ ✔ ✔ ✔<br />
Set targets ✔ ✔ ✔ ✔ ✔ ✔<br />
Verify ✔ ✔ ✔ ✔ ✔ ✔<br />
systems, set design targets for components or to verify the performance of<br />
proposed designs. Any rigorous design process must therefore be able to<br />
quantify matters in these 18 different ways as shown in Table 4.1.<br />
It is easy to focus on one small subset of the task above but to do so fails to<br />
deliver the full range of benefits possible from multibody systems analysis<br />
software. The software is generally expensive and the skilled personnel to<br />
operate it are hard to come by and so such a focus represents a lost opportunity<br />
for the organization.<br />
4.1.1 Wheel load variation<br />
Since a vehicle with four wheels is statically indeterminate with respect to<br />
the calculation of reaction forces, only with some elastic behaviour (‘compliance’)<br />
in the suspension can a determinate solution be formulated unless<br />
some presumption of symmetry is made; otherwise, the ‘wobbly table’<br />
case exists where there are at least three possible load distributions (Figure<br />
4.2). This leads to abrupt fluctuations in load of a type barely tolerable in<br />
restaurants and unconscionable for road vehicle behaviour. For the problem<br />
shown we have one system and three possible reaction load solutions.<br />
These include being balanced on the two longest legs (left in Figure 4.2) –<br />
unlikely in practice but a solution in theory – or being balanced on three<br />
Fig. 4.2<br />
A classic case of static indeterminancy


