


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
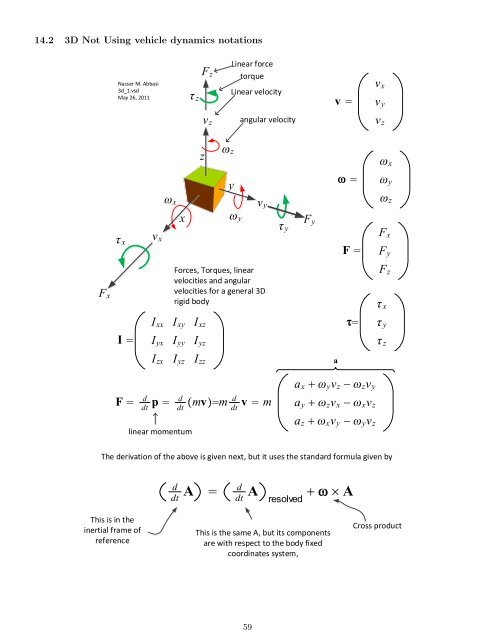
14.2 3D Not Using vehicle dynamics notations<br />
Nasser M. Abbasi<br />
3d_1.vsd<br />
May 26, 2011<br />
z<br />
F z<br />
Linear force<br />
torque<br />
Linear velocity<br />
v <br />
v x<br />
v y<br />
v z<br />
angular velocity<br />
v z<br />
F x<br />
x<br />
I <br />
v x<br />
x<br />
x<br />
z<br />
z<br />
y<br />
y<br />
F y<br />
<br />
F <br />
Forces, Torques, linear<br />
velocities and angular<br />
velocities for a general 3D<br />
rigid body<br />
I xx I xy I xz<br />
<br />
I yx I yy I yz<br />
F d p dt d mvm d v m dt dt<br />
a y z v x x v z<br />
a<br />
a x y v z z v y<br />
v y<br />
y<br />
x<br />
y<br />
z<br />
F x<br />
F y<br />
F z<br />
x<br />
y<br />
z<br />
linear momentum<br />
a z x v y y v z<br />
The derivation of the above is given next, but it uses the standard formula given by<br />
d<br />
A d<br />
A A<br />
dt dt resolved<br />
This is in the<br />
inertial frame of<br />
reference<br />
This is the same A, but its components<br />
are with respect to the body fixed<br />
coordinates system,<br />
Cross product<br />
59


