Regulatory cyfrowe
sterowniki
sterowniki

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Regulatory</strong> <strong>cyfrowe</strong>Wykład 3
Regulacja DDC przy zastosowaniumikrokomputera• Aktualnie w automatyzacji urządzeń i instalacjitechnologicznych w inżynierii środowiska są powszechniestosowane regulatory <strong>cyfrowe</strong> isterowniki.• Regulatorami cyfrowymi nazywane są małe urządzeniamikroprocesorowe głównie realizujące funkcje regulacyjnejak np.: cyfrowy regulator temperatury, cyfrowy regulatorprzepływu itp.• Bardziej rozbudowane urządzenia mikroprocesorowe zprzewagą funkcji sterowania nazywane sąsterownikami.
Historia• Pierwsze sterowniki <strong>cyfrowe</strong> powstały w USA pod koniec latsześćdziesiątych.• W technice ogrzewania i klimatyzacji są stosowane od roku 1979(Recknagel).• Dawniej złożone układy sterowania i regulacji były wykonywane wtechnice przekaźnikowej, w postaci szaf sterowniczych z trwałymokablowaniem. Po wprowadzeniu do automatyki technikimikroprocesorowej (komputerowej) układy przekaźnikowe zostajązastąpione przez bezpośrednie sterowanie <strong>cyfrowe</strong> DDC (Direct DigitalControl) –przykład zOpola.• W sterowaniu cyfrowym działanie logiczne jest swobodnieprogramowalne imoże być zmieniane bez wymiany okablowania.• Ograniczenie okablowania szaf sterowniczych oraz łatwośćwprowadzania zmian w algorytmach sterowania (zmiana programu)znacznie obniżyły koszty budowy i modernizacji układów regulacji isterowania.• Szybki rozwój techniki <strong>cyfrowe</strong>j wlatach 90-tych spowodował obniżeniekosztów urządzeń cyfrowych, dzięki temu stało się możliwe powszechnezastosowanie mikrokomputerów do sterowania i regulacji różnychprocesów.
Regulacja DDCDo istotnych zalet układów DDC należy możliwość:- realizacji dowolnie złożonych algorytmów sterowania,włącznie ze sterowaniem optymalnym iadaptacyjnym,-ciągłego pomiaru irejestracji wartości dowolnych parametrówprocesu,- przetwarzania danych pomiarowych,- wykrywania isygnalizacji stanów awaryjnych,- zwiększenia dokładności sterowania na skutekdokładniejszej identyfikacji obiektu regulacji.Cyfrowe układy scalają regulację, sterowanie ioptymalizację.
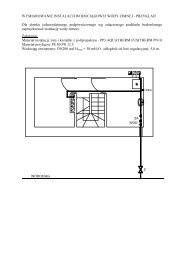
Regulacja DDC przy zastosowaniu mikrokomputera• Podstawowa różnica pomiędzy regulatorami analogowymi icyfrowymipolega na tym, że w regulatorach analogowych sygnały analogoweulegają ciągłej obróbce awregulatorach cyfrowych następuje zamianasygnału analogowego na cyfrowy (binarny) następnie obróbka sygnału iponowna zamiana na sygnał analogowy (rys.).Regulator cyfrowyy mA/DMikrokomputerD/Aw• Ponadto sygnały wregulatorach cyfrowych sąpróbkowane co ustalonyodstęp czasu (cykliczny charakter pracy).• Obliczenia <strong>cyfrowe</strong> wykonywane sątylko dla dyskretnego czasu zamiastwsposób ciągły, potrzebny jest więc impulsator po stronie wejściowej iekstrapolator po stronie wyjściowej.
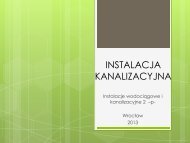
Schemat funkcjonalny regulatora <strong>cyfrowe</strong>goZegarRAMchipEPROMchipCPUmikroprocesorModułwejściaszyna danychszyna adresówszyna sterowaniaModułwyjścia
Schemat funkcjonalny regulatora <strong>cyfrowe</strong>go(mikrokomputera)
Budowa regulatora <strong>cyfrowe</strong>go (sterownika)• Mikroprocesor CPU (Central Processing Unit) jest elementem głównymmikrokomputera, który rozumie sformułowane w programie rozkazy isteruje składnikami systemu w nadawanym przez zegar takciesystemowym, wzaprogramowanej kolejności.• Mikroprocesor komunikuje się zpamięcią, wktórej przechowywane sąprogramypodstawowe, dane oraz programy użytkowe.• W pamięci roboczej RAM (Random Access Memory) zapisywane sąwyniki pośrednie. Mogą tam być zapamiętywane dane zmienne, jakwartości zadane, nastawy regulatora, harmonogramy czasowe.• Dane te muszą pozostać w pamięci również po wyłączeniu napięciasieciowego, dlatego ta część mikrokomputera posiada zasilaniebateryjne.• W pamięci operacyjnej są zapisane programy wprowadzane przezproducenta sterownika, projektanta systemu automatyki lub samegoużytkownika. Wzależności od sposobu zapisu rozróżnia się następującerodzaje pamięci stałej: typu EPROM, EEPROM iFLASH EPROM.
Budowa regulatora <strong>cyfrowe</strong>go (sterownika)• Interfejs (PORT) służy do wprowadzenia do regulatora informacji wpostaci <strong>cyfrowe</strong>j (binarnej), np. opołożeniu łączników oraz wysyłaniu zregulatora cyfrowych sygnałów wyjściowych, np. do przekaźników ilampek kontrolnych. Wyjścia mogą być również podłączone do drukarekraportów roboczych, do nadrzędnego komputera lub do systemu BMS.• Detektor zaniku zasilania (ang. Watch –Dog) zapobiega wpisaniu dopamięci przypadkowych wartości podczas nagłego zaniku zasilaniaregulatora oraz gwarantuje poprawne przywrócenie procesu regulacji.• Watch –Dog jest układem niezależnie odliczającym czas. Chroni onmikroprocesor przed zbyt długim przebywaniem wstanie zawieszenia –resetuje procesor w przypadku nieotrzymania od niego sygnału wokreślonym czasie (najczęściej wmilisekundach). Dzięki temu unika sięniepożądanych zdarzeń w procesie regulacji, które mogłyby wystąpićprzy zakłóceniach, wyłączeniu lub zawieszeniu procesora lub innychkomponentów regulatora.
Budowa regulatora <strong>cyfrowe</strong>go (sterownika)• Moduły wejściowe i wyjściowe sprzęgają sterownik z obiektemsterowania. Elementem modułów sąprzetworniki analogowo-<strong>cyfrowe</strong>A/C iC/A oraz bloki wejść iwyjść cyfrowych (interfejs).• Przetworniki stosowane są w celu wprowadzenia do sterownikainformacji o wielkości analogowej mierzonej na obiekcie np.temperaturze, ciśnieniu, wilgotności, napięciu, prądzie itp.• Sygnały w postaci analogowej muszą być przetworzone na sygnałcyfrowy (binarny), gdyż tylko w takiej postaci sterownik może teinformacjewykorzystać.
Budowa regulatora <strong>cyfrowe</strong>go (sterownika)• W celu obniżenia kosztów sterownik wyposażony jest wjeden przetwornik A/C oraz multiplekser, który jesturządzeniem przełączającym sygnały analogowe.Multiplekser wybiera i doprowadza do przetwornika A/Ckolejne sygnały.• Sterowanie urządzeniami wykonawczymi układu regulacjimoże być realizowane przy pomocy sygnałów cyfrowych ianalogowych. Wszystkie sygnały wychodzące zmikrokomputera mają charakter binarny, dlatego w celuwytworzenia sygnałów analogowych na wyjściu zesterownika stosowane są przetworniki cyfrowoanalogoweC/A. Do obsługi sygnałów analogowychwyjściowych nie stosuje się multiplekserów leczindywidualne przetworniki C/A.
Rozwiązania sprzętowe sterowników• Przyjmując budowę mechaniczną jako kryterium podziałusterowników można wymienić następujące rodzaje:- sterowniki kompaktowe,- sterowniki kompaktowe rozszerzalne z możliwościąprzyłączenia dodatkowych modułów we/wy,- sterowniki modułowe,- sterowniki modułowe zmodułami rozproszonymi.
Sterowniki kompaktowe• Konstrukcja kompaktowa stosowana jest zwykle do małychsterowników.• W jednej obudowie sterownika mieszczą się wszystkieniezbędne elementy tj. zasilacz, jednostka centralna, paneloperatorski (ekran z klawiaturą) oraz moduły wejścia iwyjścia ookreślonej liczbie zacisków.• Zaletą takiej budowy jest prosta konstrukcja iłatwy montaż.• Małe sterowniki kompaktowe są wyposażone w pamięćtypu EPROM lub EEPROM z fabrycznie wprowadzonymoprogramowaniem aplikacyjnym adresowanym dokonkretnych obiektów regulacji jak: węzeł ciepłowniczy,centrala wentylacyjna, mała kotłownia.
Sterowniki kompaktowe• Użytkownik ma możliwość wprowadzenia przy pomocyklawiatury zmiany zaprogramowanych przez producentawartości zadanych, nastaw dynamicznych orazharmonogramówczasowych.• Jeżeli z jakiegoś powodu zmiany wprowadzone przezużytkownika do pamięci typu EPROM zostaną skasowane –np. wskutek przerwy w zasilaniu elektrycznym – poprzywróceniu zasilania sterownik będzie pracował wedługnastaw fabrycznych.
Przykład regulatora kompaktowego z fabryczniezaprogramowaną aplikacją.• Regulator temperatury ALBATROS® RVA33.121 firmySiemens
Kompaktowy regulator temperaturyALBATROS• Jest zaprogramowanym fabrycznie regulatoremprzeznaczonym do sterowania instalacji kotłowychwyposażonych w:• 1-stopniowy palnik,• zasobnik ciepłej wody użytkowej,• pompę ładującą lub 2-położeniowo sterowany zawór,• pompę kotłową,• pompę strefy grzewczej.
Kompaktowy regulator temperaturyALBATROSPodstawowe funkcje regulacyjne:• regulacja temperatury wody na wyjściu zkotła nadążna (pogodowa) lubstałowartościowa, zwpływem lub bez wpływu czujnika temperatury wpomieszczeniu poprzez: 1-stopniowy palnik,• sterowanie pompą obiegową c.o.,• szybkie obniżenie ipodwyższenie temperatury po okresach temperaturykomfortuoraz obniżonej,• automatyczneogrzewczego),wyłączenie ogrzewania (funkcja końca sezonu• sterowanie poprzez cyfrowy lub analogowy czujnik pomieszczeniowy, zuwzględnieniem dynamiki budynku, automatyczne dopasowaniewykresu regulacyjnego do budynku i zapotrzebowania ciepła (przypodłączonym czujniku pomieszczeniowym).
Sterowniki kompaktowe z biblioteką aplikacji• W grupie sterowników kompaktowych dużą popularnościącieszą się sterowniki wyposażone w bibliotekę fabryczniezaprogramowanych aplikacji.• W zależności od automatyzowanego układutechnologicznego i realizowanych przez ten układ funkcji,użytkownik przy pomocy klawiatury wybiera z pamięcisterownika stosowną aplikację (opisaną przez producenta wkatalogu) i wprowadza wartości nastaw statycznych orazdynamicznych.• Sterowniki tego typu szczególnie przydatne są wautomatyzacji typowych central wentylacyjnych oraz węzłówciepłowniczych.
Sterowniki kompaktowe swobodnieprogramowalne• Większe sterowniki kompaktowe wyposażane sąwpamięćtypu Flash EPROM dającą projektantowi systemumożliwość wprowadzenia dowolnej własnej aplikacji.• Taki sterownik nazywamy swobodnie programowalnym.• Producenci sterowników swobodnie programowalnychudostępniają projektantom fabryczne oprogramowanienarzędziowe do programowania (konfigurowania)sterowników.• Większość producentów udostępnia oprogramowanienarzędziowe odpłatnie na podstawie umowy licencyjnej,zapewniając przy tym niezbędne szkolenie wkorzystaniu zoprogramowania.
Sterowniki swobodnie programowalne• Do zalet sterowników swobodnie programowalnych należy zaliczyć:– możliwość tworzenia dowolnej koncepcji sterowania, zgodnie zcharakterystyką automatyzowanego obiektu oraz wymaganiamistawianymi przez użytkownika,– łatwość dostosowania programu sterującego do zmian wukładzietechnologicznym lub wymagań użytkownika obiektu przez korektęlub napisanie nowego programu sterującego,– łatwość wprowadzania programu sterującego do sterownika przezinterfejs (złącze szeregowe, USB),– możliwość przenoszenia aplikacji na inne sterowniki obsługującepodobne obiekty,– możliwość włączania sterowników do sieci komputerowegozarządzania budynkami BMS (Building Management Systems) lubenergią BEMS (Building Energy Managament Systems).
Sterowniki swobodnie programowalne• Stosując sterowniki swobodnie programowalne należy sięliczyć z pewnymi trudnościami i dodatkowymi kosztami.Należą do nich:–konieczność zakupu oprogramowania narzędziowegowraz z komputerem serwisowym (typu laptop) iinterfejsami komunikacyjnymi do konfigurowaniasterowników,–umiejętność tworzenia programów sterujących orazobsługi programów narzędziowych.
Programowalne regulatory (sterowniki)kompaktowe z biblioteką aplikacjiZastosowanie pamięci programowej typu Flash EPROMstwarza możliwość fabrycznego wyposażania regulatorów wbibliotekę aplikacji standardowych, adaptacji tych aplikacjido danego obiektu sterowania a także tworzenia przezużytkownika nowych aplikacji.Do tej grupy można między innymi zaliczyć:• sterownik Excel (XL) 50 firmy Honeywell,• serię regulatorów Synco 200 firmy Siemens,• oraz• SC-9100 firmy Johnson Controls Int.
Programowalne regulatory (sterowniki)kompaktowe z biblioteką aplikacjiExcel 50 firmyHoneywell
Excel 50• Excel 50 dostępny jest wdwóch wersjach:• 1. Wersja konfigurowalna (z modułami aplikacyjnymiróżnymi dla poszczególnych grup aplikacyjnych). Kodaplikacji można wygenerować za pomocą programuselekcyjnego LIZARD iwprowadzić do pamięci sterownikaza pomocą pulpitu operatorskiego.• 2. Wersja swobodnie programowalna (z modułamiaplikacyjnymi umożliwiającymi swobodne programowanieaplikacji). Wykonanie i załadowanie oprogramowaniaaplikacyjnego sterownika umożliwia program narzędziowyCARE.• Sterownik posiada 8 wejść analogowych i 4 wyjściaanalogowe oraz 4 wejścia <strong>cyfrowe</strong> i 6 wyjść cyfrowych.Każde 2 wyjścia <strong>cyfrowe</strong> umożliwiają bezpośrednie 3-położeniowe sterowanie siłownikiem.
<strong>Regulatory</strong> Synco 200 (RLU2..) firmy Siemens
<strong>Regulatory</strong> Synco 200 (RLU2..) firmySiemens• Są przeznaczone do stosowania w prostych i złożonychinstalacjach wentylacji, klimatyzacji ichłodzenia wodnego,do regulacji następujących zmiennych: temperatury,wilgotności, ciśnienia, przepływu powietrza, jakościpowietrza wpomieszczeniu oraz entalpii• Każdy typ regulatora zawiera 39 zaprogramowanychaplikacji.• Podczas uruchamiania instalacji należy wprowadzićodpowiedni typ instalacji bazowej. Wszystkie funkcjezwiązane z aplikacją, przyporządkowanie zacisków,niezbędne ustawienia iwyświetlane obrazy sąuaktywnianeautomatycznie. Parametry, które nie sąpotrzebne, nie sąuaktywniane.
<strong>Regulatory</strong> Synco 200 (RLU2..) firmySiemens• Ponadto każdy typ regulatora uniwersalnego mazaładowane 2 puste aplikacje: jedną dla typupodstawowego A (regulator wentylacyjny) oraz jedną dlatypu podstawowego U(regulator uniwersalny).• Przy użyciu wbudowanych elementów operatorskich lubinterfejsu komunikacyjnego regulator oferuje następującemożliwości:-uaktywnianie zaprogramowanej aplikacji,-modyfikowanie zaprogramowanej aplikacji,-swobodne konfigurowanie dostępnych aplikacji.• <strong>Regulatory</strong> zserii Synco 200, zależnie od typu posiadajądo: 5wejść uniwersalnych (rezystancyjne inapięciowe 0-10V), 2wejść cyfrowych, 3wyjść analogowych (napięciowe0-10V), 6wyjść cyfrowych.
Regulator cyfrowy SC-9100 firmyJohnson Controls
Regulator cyfrowy SC-9100• Regulator może posiadać w pamięci do 100zaprogramowanych przez producenta gotowych aplikacji, dowykorzystania w automatyzacji instalacji grzewczych,wentylacyjnych iklimatyzacyjnych.• Program aplikacyjny jest wybierany idopasowywany przezzmianę parametrów podczas uruchamiania.• Wpolu odczytowym regulatora wyświetlane sąinformacjedotyczące numeru katalogowego aplikacji, stanu wejść iwyjść oraz sterowania.• Używając interfejsu komunikacyjnego możnazaprogramować nowe aplikacje dopasowane do potrzebużytkownika.
Regulator cyfrowy SC-9100• Regulator posiada:• 4 wejścia analogowe (2 napięciowe 0-10 V dc i 2rezystancyjne NTC),• 2wejścia <strong>cyfrowe</strong>,• 3wyjścia analogowe (napięciowe 0-10 Vdc),• 2wyjścia <strong>cyfrowe</strong> triakowe,• oraz 1wyjście <strong>cyfrowe</strong> przekaźnikowe.
Swobodnie programowalne sterownikirozszerzalne• Do automatyzacji większych obiektów jak: kotłownie, systemy wentylacjii klimatyzacji, stosowane są sterowniki o odpowiednio dużej liczbiewejść/wyjść oraz odpowiednio dużej pamięci programowej.• Podstawową konstrukcją sterownika w tej grupie jest sterownikkompaktowyrozszerzalny.• Wskład tego sterownika wchodzi swobodnie programowalny sterownikkompaktowy o określonej liczbie wejść/wyjść oraz dowolniekonfigurowana dodatkowa liczba modułów rozszerzających w postaciwejść/wyjść cyfrowych oraz analogowych.• Moduły rozszerzające zawierają jedynie układy wejść/wyjść, którepołączone przewodem komunikacyjnym ze sterownikiem korzystają zjego zasilacza, jednostki centralnej ipamięci.• W przypadku niewystarczającej liczby wejść/wyjść jednostkipodstawowej użytkownik sam konfiguruje sterownik dobierającodpowiednią liczbę i rodzaj modułów, łącząc je ze sterownikiemkompaktowym.
Swobodnie programowalne sterownikirozszerzalneTypowymi przedstawicielami tej grupy sterowników są:• DX 9100 z modułami wejść/wyjść XT/XP firmy JohnsonControls Int.• oraz sterowniki Xenta 300 z modułami wejść/wyjść seriiXENTA 400 firmy TAC
Rozszerzalny sterownik DX-9100 firmy JohnsonControls
Rozszerzalny sterownikDX-9100• Wwersji DX 9126 posiada:• 8wejść analogowych (napięciowe 0-10 Vdc, prądowe 0/4-20 mA dc, rezystancyjne),• 8wejść cyfrowych bezpotencjałowych,• 6wyjść cyfrowych triakowych,• 4 wyjścia analogowe (napięciowe 0-10 Vdc lub prądowe0/4-20 mA dc)• oraz 4wyjścia analogowe napięciowe0-10 Vdc.• W przypadku, gdy jest wymagana większa liczbawejść/wyjść można dołączyć dodatkowe moduły XT/XP.• Maksymalna liczba przyłączonych modułówrozszerzających XT/XP nie może przekroczyć liczby 64wejść/wyjść.
Rozszerzalny sterownikTAC Xenta 300
TAC Xenta 300• TAC Xenta 300 jest sterownikiem o ustalonych 20wejściach/wyjściach z możliwością przyłączenia dwóchmodułów rozszerzających o dalsze 20 wejść/wyjść orazprzenośnego panelu operatorskiego.• Sterownik jest adresowany do sterowania systemówgrzewczych iklimatyzacyjnych.• Programowanie odbywa się z komputera przy pomocyprogramu narzędziowego TA Menta.• Do bieżącej obsługi serwisowej regulatora służyprzenośnypanel operatorski wyposażony w 6przyciskową klawiaturęoraz wyświetlacz LCD. Panel umożliwia zmianę nastaw,kontrolę parametrów oraz obserwowanie trendów.• Sterownik posiada bufor pamięci umożliwiającyzarchiwizowanie do 2000 wartości wybranych wielkości.
Sterowniki modułowe• Sterowniki modułowe pod względem konstrukcyjnym sąpodobne do typowych sterowników przemysłowych.• Specyfika ich budowy polega na wykonaniu woddzielnychobudowach modułów funkcjonalnych tj. zasilacza, jednostkicentralnej, modułu komunikacyjnego oraz różnego rodzajumodułów wejścia iwyjścia.• Projektant każdorazowo, zależnie od automatyzowanegoobiektu, dobiera rodzaj i liczbę modułów łącząc je wzależności od konstrukcji przez zabudowę w kasetach(obudowa kasetowa) lub mechanicznie za pomocąodpowiednich złącz.
Sterowniki modułowe WAGO
Sterowniki modułowe WAGO• Do modułu sterownika mogą być przyłączane moduły wejśćiwyjść w łącznej ilości do 248 wejść/wyjść cyfrowych lub124 wejść/wyjść analogowych.• Moduły wejść/wyjść są wykonywane wwersjach 1, 2, 4oraz8kanałowych.• Zastosowana konstrukcja umożliwia szybkie mechanicznełączenie modułów, dużą niezawodność, odporność nadrgania inie wymaga konserwacji.• Firma oferuje także moduły w wykonaniuprzeciwwybuchowym EX.• Sterownik sieciowy WAGO pracuje wsystemach LonWorksiETHERNET TCP/IP
Sterowniki z modułami rozproszonymi• Sterowniki modułowe wykonywane są również w formierozproszonej z modułami wejść i wyjść łączonymi zjednostką centralną kablem komunikacyjnym.• Stosuje się je głównie na bardzo rozległych obiektach, gdziedoprowadzenie do sterownika sygnałów wejścia iwyjścia wformie standardowych sygnałów elektrycznych prądowychlub napięciowych wymagałoby wykonania bardzokosztownego okablowania.• Wielożyłowe kable elektryczne zastępuje wówczas znaczniekrótszy itańszy kabel komunikacyjny typu skrętka.
Sterownik modułowy Excel 500
Excel 500 firmy Honeywell• Sterownik jest produkowany w wersji kasetowejoraz w wersji z modułami wejść/wyjść w formierozproszonej.• Moduł jednostki centralnej (procesora), modułzasilacza oraz moduły komunikacyjne montowanesą wyłącznie wkasetach.• Moduły wejść/wyjść analogowych i cyfrowych sąwykonywane w formie kasetowej (do montażu wkasetach) oraz wformie rozproszonej do montażuna szynie DIN, umieszczanej na automatyzowanymobiekcie w pobliżu elementów pomiarowych iurządzeń wykonawczych.
Excel 500 firmy Honeywell w formierozproszonej• Każdy moduł rozproszony posiada procesor ECHELONdzięki czemu komunikuje się ze sterownikiem poprzezinterfejs komunikacyjny LonWorks.• Magistrala komunikacyjna LonWorks łącząca modułyrozproszone zjednostką centralną jest wykonana wpostaci2-żyłowego kabla typu skrętka.• Do jednego sterownika można przyłączyć maksymalnie 16modułów wejść iwyjść co odpowiada obsłudze 128 punktówfizycznych oraz maksymalnie 256 punktom programowym.• Moduł jednostki centralnej jest wyposażony w 16-bitowymikroprocesor oraz pamięć programową typu FlashEPROM.
Kryteria doboru regulatorów cyfrowych(sterowników)• Dobrany regulator powinien posiadać:–możliwość przyłączenia niezbędnej ilości i rodzajówsygnałów wejściowych iwyjściowych,–możliwość realizacji wszystkich niezbędnych funkcji zzakresu regulacji isterowania instalacji technologicznej;zaprogramowanych iwpisanych do pamięci programowejprzez producenta lub niezbędną pojemność pamięciregulatora swobodnie programowalnego dowprowadzenia aplikacji wykonanej przez programistę.–w przypadku regulatorów swobodnie programowalnychdostępny i przyjazny dla użytkownika programnarzędziowy do programowania (konfigurowania),
Kryteria doboru regulatorów cyfrowych(sterowników) c.d.–dla regulatorów przewidzianych do pracy w sieci BMSprotokół komunikacji kompatybilny z zastosowanymsystemem komputerowym,–wymagany zakres dopuszczalnych parametrów klimatu wotoczeniu regulatora,–wymagany rodzaj zasilania (np. napięciem bezpiecznym24 V),–dogodny sposób zabudowy (na ścianie, wewnątrz szafyna szynie DIN lub welewacji szafy),
Kryteria doboru regulatorów cyfrowych(sterowników) c.d.–możliwość obsługi regulatora zpanelu operatorskiego,–niezawodność,–dostępny autoryzowany serwis.- koszt regulatora porównywalny z kosztami innychregulatorów podobnejklasy,- możliwie niski koszt okablowania pomiędzyregulatorem a urządzeniami pomiarowymi iwykonawczymi (aparaturą polową) np. przy dużychobiektach możliwość stosowania modułówrozproszonych.
Dziękuję za uwagę !