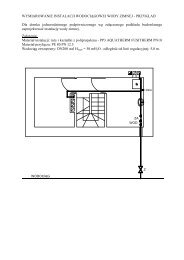
2.3 Regulacja temp w pomieszczeniu 2.4 UAR temp w pomieszczeniu
AUTOMATYKA
AUTOMATYKA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.5. Elementy i sygnały w <strong>UAR</strong>KaŜdy typowy <strong>UAR</strong> składa się z następujących elementów składowych:1 = REGULATOR2 = CZŁON POMIAROWY3 = CZŁON WYKONAWCZY4 = OBIEKT REGULACJIZ 1 Z 2 Z 3z = wielkości zakłócającey = wielkość regulowanaw = wartość zadanau = wielkość nastawna2 Tw4y1u32.6. SterowanieJest to proces w układzie otwartym, w którym wielkość wejściowawpływa na wielkość wyjściową według prawidłowości właściwejdanemu obiektowi.<strong>Regulacja</strong> natomiast odbywa się w układzie zamkniętym(sygnał krąŜy w pętli).
<strong>2.3</strong>. Sterowanie <strong>temp</strong>. w pomieszczeniachZ 1 Z 2 Z 3+ 20°C+ 20°C°C20100-10-20<strong>2.4</strong>. Sterowanie <strong>temp</strong>. w <strong>pomieszczeniu</strong>Z 1 Z 2 Z 3+ 20°C+ 20°C
4.1. Schemat blokowy REGULACJI<strong>Regulacja</strong> <strong>temp</strong>eratury w <strong>pomieszczeniu</strong> ogrzewanym4.1. Schemat blokowy REGULACJI<strong>Regulacja</strong> <strong>temp</strong>eratury w <strong>pomieszczeniu</strong> ogrzewanym1 342
5.1. Stacja hydroforowaP5.2. Ogrzewanie indywidualneT
5.5. Pogodowa regulacja <strong>temp</strong>. wodyzasilającej grzejnik i sterowanie <strong>temp</strong>.powietrza w <strong>pomieszczeniu</strong>y’ 53 y64
1. Podstawowe rodzaje regulacjiAUTOMATYCZNAREGULACJA1.1. <strong>Regulacja</strong> STAŁOWARTOŚCIOWAUtrzymanie wartości regulowanej na stałym poziomie niezaleŜnie odzakłóceń działających na układ.np. regulacja <strong>temp</strong>eratury c.w.u. za podgrzewaczem c.w.u.Wymagania:Zakłócenia:Rozwiązanie:M
1.1. <strong>Regulacja</strong> STAŁOWARTOŚCIOWAElementy <strong>UAR</strong>:REGULATOR:CZŁON POMIAROWY:.CZŁON WYKONAWCZY:OBIEKT REGULACJI:.Sygnały w <strong>UAR</strong>z = wielkości zakłócające:.y = wielkość regulowana:w = wartość zadana:u = wielkość nastawna:e = odchyłka regulacji:1.2. <strong>Regulacja</strong> NADĄśNA (kompensacyjna)Ma za zadanie nadąŜanie za zmianami wartości zadanej, która zmieniasię w sposób niezdeterminowany (trudny do przewidzenia).np. regulacja pogodowa instalacji c.o.te+90tz, mTemp.zasilaniac.o.+20-20 0 +20Temp.zewn.źródłociepłagrzejnikTe = <strong>temp</strong>eratura zewnętrznaTz = <strong>temp</strong>eratura wody na zasilanium= przepływ const.
1.2. <strong>Regulacja</strong> NADĄśNA (kompensacyjna)Wymagania:Zakłócenia:Rozwiązanie:Wykres regulacyjny:Wykres sporządzony według znanej dladanego obiektu (pomieszczenia,budynku) zaleŜności przyporządkowującydanej te wymaganą tz.tz+90+20-20 0 +20 teWykres regulacyjnytz+90+20-20 0 +20 te
1.2. <strong>Regulacja</strong> NADĄśNA (kompensacyjna)Elementy <strong>UAR</strong>:REGULATOR:CZŁON POMIAROWY:CZŁON WYKONAWCZY:OBIEKT REGULACJI:Sygnały w <strong>UAR</strong>z = wielkości zakłócające:y = wielkość regulowana:w = wartość zadana:u = wielkość nastawna:e = odchyłka regulacji:1.3. <strong>Regulacja</strong> PROGRAMOWARealizuje zadaną w czasie zmianę wartości zadanej według ściśleokreślonego programu godzinowego, dobowego, tygodniowego,miesięcznego, rocznego, dni roboczych i wolnych, itp.np. osłabienia nocne czy weekendowe w instalacjach centralnegoogrzewania w obiektach uŜytkowanych okresowo (biura, szkoły).W ramach regulacji programowej mogą być realizowane procesysterowania i regulacji zarówno nadąŜnej jak i stałowartościowej.
1.3. <strong>Regulacja</strong> PROGRAMOWAw (t i °C)+20+150:00 7:00 17:00 24:00czas2. Stopnie regulacji. <strong>Regulacja</strong> jednostopniowa.ODBIORNIKCIEPŁATeŹRÓDŁOCIEPŁAINSTALACJAC.O.ODBIORNIKCIEPŁA
2. Stopnie regulacji. <strong>Regulacja</strong> dwustopniowa.ZAWÓRREGULACYJNYODBIORNIKCIEPŁATeŹRÓDŁOCIEPŁAINSTALACJAC.O.ODBIORNIKCIEPŁA2. Stopnie regulacji. <strong>Regulacja</strong> trójstopniowa.ZAWÓRREGULACYJNYODBIORNIKCIEPŁA(ELEKTRO)CIEPŁOWNIASIEĆ CIEPŁOWNICZAWĘZEŁCIEPŁO-WNICZYODBIORNIKCIEPŁA
3. Jakość regulacjiPoprawne działanie układu regulacji (regulowanie obiektem) zaleŜy oddoboru odpowiedniego typu regulatora do konkretnego obiekturegulacji.Poprawność działania <strong>UAR</strong> jest wyraŜana jakością regulacji.Najczęściej jakość regulacji określana jest na podstawie analizyprzebiegu przejściowego układu (zmian sygnału wyjściowego) będącegoodpowiedzią na skokową zmianę wymuszenia (sygnału wejściowego).3.1. Ocena jakości regulacjiAnaliza właściwości<strong>UAR</strong>(jakości regulacji)W STANACHSTATYCZNYCHW STANACHDYNAMICZNYCHOkreślenie wskaźnikówregulacji t R , e 1 , e max i K
3.2. Jakość regulacji w stanach statycznychKryterium oceny jest wielkość odchyłki statycznej „e” jako róŜnicymiędzy wartością zadaną „w” a wielkością regulowaną „y” w stanieustalonym. Im mniejsza odchyłka „e”, tym lepsza jakość regulacji.Stan ustalony osiągany jest gdy wartości sygnałów wejściowego i wyjściowegoukładu są stałe.w(wartośćzadana)czas3.3. Jakość regulacji w stanach dynamicznychOcena na podstawie analizy charakterystyki skokowej (przebieguprzejściowego) jako odpowiedź <strong>UAR</strong> na znaną, skokową zmianęwymuszenia (zakłócenie wprowadzone do układu).e+ ∆e- ∆ete - odchyłka regulacji, e max - odchyłka maksymalna,e 1 - odchyłka o przeciwnym znaku do e max , K - przeregulowanie, t R - czas regulacji
3.4. Ocena jakości regulacji. Stan ustalony.2w431czas3.5. Ocena jakości regulacji. Stany dynamiczne.et
1. Właściwości elementów automatykiKaŜdy z elementów (członów) automatyki ma określone właściwości,których korelacja określa właściwości całego układu(połączenia szeregowe, równoległe i sprzęŜenie zwrotne).Znajomość właściwości poszczególnych elementów automatyki jestkonieczna dla poprawnego doboru <strong>UAR</strong> i dla osiągnięcia wymaganejjakości regulacji.Wymaga się „dopasowania” elementów <strong>UAR</strong> do danego obiekturegulacji. NaleŜy poznać i odpowiednio uwzględnić właściwości obiektuoraz wszelkich elementów składowych <strong>UAR</strong>.NaleŜy znać sposób zachowania się obiektu którego pracą chcemykierować, jak reaguje na zakłócenia, jakie czynności naleŜy podjąć abyosiągnąć określony cel, itp. Co zrobić Ŝeby…? Co się stanie gdy…?
1.1. Właściwości elementów automatykiWłaściwości elementu automatyki opisują sposób przetwarzania przezdany element automatyki sygnałów wejściowych (x) na sygnaływyjściowe (y).sygnałwejściowyxZmianie moŜe ulegać:Elementautomatykizmiana sygnałusygnałwyjściowyy• wartości sygnału (zwiększenie lub zmniejszenie)• postać sygnału• przebieg sygnału w czasie (opóźnienie, wydłuŜenie, skrócenie, itp.)• i inne.1.2. Właściwości elementów automatykiWŁAŚCIWOŚCIELEMENTÓW AUTOMATYKIWŁAŚCIWOŚCISTATYCZNE(stan ustalony)WŁAŚCIWOŚCIDYNAMICZNE(wymuszenie)
2. Właściwości STATYCZNEWłaściwości statyczne elementu automatyki określa charakterystykastatyczna.Opisuje ona zaleŜność między sygnałem wejściowym i wyjściowymdanego elementu w stanie ustalonym (stanie statycznym).Charakterystykę statyczną wyznacza się analitycznie lubdoświadczalnie.STAN USTALONYsygnałwejściowyxElementautomatykizmiana sygnałusygnałwyjściowyyczas2.1. Analityczne wyznaczanie wł. statycznychAnalityczne wyznaczanie charakterystyki statycznej polega na opisaniuukładu za pomocą znanych zaleŜności matematycznych (modelmatematyczny).PRZYKŁAD 1:Qte
2.1. Analityczne wyznaczanie wł. statycznychAnalityczne wyznaczanie charakterystyki statycznej polega na opisaniuukładu za pomocą znanych zaleŜności matematycznych (modelmatematyczny).PRZYKŁAD 2:∆pv2.2. Doświadczalne wyzn. wł. statycznychDoświadczalne wyznaczanie charakterystyki statycznej:1. Podanie do elementu automatyki znajdującego się w stanieustalonym znanego, niezmiennego sygnału wejściowego x2. Zmierzenie odpowiadającej mu stałej wartości sygnałuwyjściowego y po ponownym osiągnięciu przez element stanuustalonego.
2.2. Doświadczalne wyzn. wł. statycznychPRZYKŁAD 3: .HH1H2H3H4G1 G2 G3 G4 G3. Właściwości DYNAMICZNEWłaściwości dynamiczne elementu automatyki określa charakterystykadynamiczna.Przedstawia ona zmienność w czasie sygnału wyjściowego y po zmianiesygnału wejściowego x.sygnałwejściowyxElementautomatykizmiana sygnałusygnałwyjściowyyJest to odpowiedź dynamiczna elementu automatyki na zmianę sygnałuwejściowego.Charakterystykę dynamiczną określa się analitycznie lubdoświadczalnie.
3.1. Analityczne wyzn. wł. dynamicznychAnalityczne określanie właściwości dynamicznych układu realizuje sięza pomocą równań róŜniczkowych (interpretacja graficzna) lub zapomocą transmitancji operatorowych będących funkcjami zmiennejzespolonej s:G(s) = Y(s) / X(s)gdzie: X(s) i Y(s) to postać operatorowa odpowiednio sygnału wejściowego i wyjściowegoTransmitancje operatorowe podstawowych elementów automatykipodane się w literaturze.MoŜna je równieŜ wyznaczyć dla danego obiektu.3.2. Doświadczalne wyzn. wł. dynamicznychDoświadczalne określanie właściwości dynamicznych:1. Obiekt w stanie ustalonym.2. Podanie na wejście odpowiednio dobranego, znanego,zmiennego w czasie sygnału wejściowego x WYMUSZENIA.3. Rejestracja wywołanych nim zmian sygnału wyjściowego y aŜdo ponownego osiągnięcia stanu ustalonego.Jest to odpowiedź układu (funkcją przejścia) między dwomastanami ustalonymi.
3.2. Doświadczalne wyzn. wł. dynamicznychOdpowiedź układu zwana równieŜ funkcją przejścia między dwomastanami ustalonymi:SygnałwejściowystanustalonyczasSygnałwyjściowystanustalonyczas4. CZŁONY AUTOMATYKI i ich właściwościSposobem analitycznego odwzorowania układu jest stworzenie jegomodelu złoŜonego z CZŁONÓW, którymi są podstawowe układy lubelementy automatyki (części składowe).zakłócenia ZweRegulatoruCzłonwykonawczyObiektregulacjiyCzłonpomiarowyCzłony automatyki moŜna dzielić według róŜnych kryteriów: zasadydziałania, budowy, zastosowania, itd.Najwygodniejszy i najpowszechniejszy jest podział członów ze względuna ich właściwości dynamiczne.
4. CZŁONY AUTOMATYKI i ich właściwościZe względu na właściwości dynamiczne w automatyce wyróŜnia sięnastępujące podstawowe człony (elementy):1. CZŁON PROPORCJONALNY2. CZŁON INERCYJNY I rzędu3. CZŁON INERCYJNY II rzędu4. CZŁON CAŁKUJĄCY5. CZŁON RÓśNICZKUJĄCY6. CZŁON OSCYLACYJNY7. CZŁON OPÓŹNIAJĄCY4.1. CZŁON PROPORCJONALNYx(t)Wymuszenie: skok jednostkowyy(t)kOdpowiedź skokowaSymbol graficzny:k – współczynnikwzmocnieniaczas
4.1. CZŁON PROPORCJONALNYPrzykład: zawór regulacyjnyWielkość wejściowa:Wielkość wyjściowa:x(t)WYMUSZENIE0ty(t)ODPOWIEDŹ0t4.2. CZŁON INERCYJNY I rzędux(t)Wymuszenie: skok jednostkowyy(t)kOdpowiedź skokowaSymbol graficzny:0,632kk – współczynnikwzmocnieniaT – stała czasowaTczasCechuje go inercja.
4.2. CZŁON INERCYJNY I rzęduPrzykład: wodna nagrzewnica powietrzaWielkość wejściowa:Wielkość wyjściowa:x(t)WYMUSZENIE0ty(t)ODPOWIEDŹ0t4.3. CZŁON INERCYJNY II rzędux(t)Wymuszenie: skok jednostkowyy(t)k0,632kOdpowiedź skokowaSymbol graficzny:k – współczynnikwzmocnieniaT o – opóźnienieT – stała czasowaT oTczas
4.3. CZŁON INERCYJNY II rzęduPrzykład: podgrzewacz c.w.u.Wielkość wejściowa:Wielkość wyjściowa:x(t)WYMUSZENIEy(t)ODPOWIEDŹ0t0 t4.6. CZŁON OSCYLACYJNY BEZ TŁUMIENIAx(t) Wymuszenie: skok jednostkowy2ky(t)Odpowiedź skokowaSymbol graficzny:kk – współczynnikwzmocnieniaczas
4.6. CZŁON OSCYLACYJNY Z TŁUMIENIEMx(t) Wymuszenie: skok jednostkowy2ky(t)Odpowiedź skokowaSymbol graficzny:kk – współczynnikwzmocnieniaczas4.6. CZŁON OSCYLACYJNY Z POBUDZENIEMx(t) Wymuszenie: skok jednostkowy2ky(t)Odpowiedź skokowaSymbol graficzny:kk – współczynnikwzmocnieniaczas
6.6. CZŁON OPÓŹNIAJĄCYx(t) Wymuszenie: skok jednostkowyy(t)Odpowiedź skokowaSymbol graficzny:t o - opóźnieniet oczas6.6. CZŁON OPÓŹNIAJĄCYPrzykład: podajnik taśmowy (taśmociąg)Wielkość wejściowa:Wielkość wyjściowa:y(t)ODPOWIEDŹx(t)WYMUSZENIEG1G20t0tL
7. CZŁONY AUTOMATYKI - przykłady1. Każdy z członów układu ma określone właściwości dynamiczne.2. Wzajemna korelacja właściwości dynamicznych poszczególnychczłonów określa właściwości dynamiczne całego obiektu.3. Znajomość właściwości dynamicznych obiektu (instalacji,urządzenia, układu) jest konieczna dla poprawnego doboru idopasowania <strong>UAR</strong>.aG1G2bGw = G1⋅G2 ⋅...⋅GnaG1G2++b+ Gw = G1 + G2 + ... + Gna±G1G2bG1Gw =1±G1⋅G27.1. Przykład 1: STACJA HYDROFOROWAPWłaściwości członów automatyki:w_y
7.2. Przykład 2: REGULACJA TEMP. NAWIEWUTWłaściwości członów automatyki:w_y7.3. Przykład 3: OGRZEWANIE STREFOWETMz/do źródła ciepłaWłaściwości członów automatyki:w_y
7.4. Przykład 4: OGRZEWANIE INDYWIDUALNETWłaściwości członów automatyki:w_y8. ZadanieNarysować charakterystykę dynamiczną obiektu:1. Proporcjonalnego o współczynniku wzmocnienia 0,5.2. Opóźniającego o opóźnieniu 30 sekund.3. Inercyjnego I rzędu o współczynniku wzmocnienia 2,5 i stałejczasowej 130 sekund.4. Inercyjności II rzędu o współczynniku wzmocnienia 2,5, stałejczasowej 100 sekund i opóźnieniu 30 sekund.Wymuszenie skokowe, jednostkowe (x =1).
1. Dotychczasowe wiadomości pozwalają na:1. Rozpoznanie i określenie właściwości obiektu regulacji i jegoposzczególnych elementów.xy2. Określenie wymagań odnośnie jakości regulacji.eK = e1/emax × 100%e(t)emaxe1+ ∆e- ∆ett R3. Wybór poŜądanego rodzaju regulacji.STAŁOWARTOŚCIOWAPROGRAMOWANADĄŻNA
2. Elementy <strong>UAR</strong> obiektu<strong>UAR</strong> danego OBIEKTU składa się z co najmniej z trzech podstawowychelementów (urządzeń) tworzących pętlę regulacyjną:1. REGULATOR2. ELEMENT POMIAROWY (czujnik)3. ELEMENT WYKONAWCZYMiędzy elementami automatyki informacje przesyłane są w postaciSYGNAŁÓW (oznaczone strzałkami).zakłócenia Zw_eRegulatoruCzłonwykonawczyObiektregulacjiyCzłonpomiarowy3. Sygnały w <strong>UAR</strong>W technice automatycznej regulacji rozróŜnia się dwa podstawowe typysygnałów dla przekazywania odczytów, stanów, rozkazów i innychinformacji między elementami automatyki:1.SYGNAŁ CYFROWY1 -0 -czas2.SYGNAŁ ANALOGOWY100% -0% -czas
3. Sygnały w <strong>UAR</strong>Sygnały obu rodzajów (A i D) mogą być dla danego elementu:1. sygnałem wejściowym, ozn. I (ang. INPUT)2. sygnałem wyjściowym, ozn. O (ang. OUTPUT)Otrzymujemy więc dla danego elementu automatyki:••••AIDIElementautomatykiElementautomatykiAODOSygnały w <strong>UAR</strong> występują w znormalizowanych postaciach (elektryczne)np.Sygnał musi być uŜyteczny (zrozumiały)3. Sygnały w <strong>UAR</strong>1. Sygnał wyjściowy (O) dla danego elementu automatyki jestzazwyczaj sygnałem wejściowym (I) dla kolejnego elementu.2. Nie moŜna bezpośrednio łączyć (mieszać) ze sobą sygnałówanalogowych (A) i cyfrowych (D).Istnieją dedykowane elementy automatyki zamieniające sygnałyA na D lub D na A według załoŜonych reguł.3. Poszczególne elementy automatyki mogą mieć więcej niŜ jedensygnał wejściowy (I) i wyjściowy (O).
3. Sygnały w <strong>UAR</strong>PRZYKŁAD: centrala wentylacyjna z nagrzewnicą powietrza.T4. Elementy pomiaroweAutomatyzacja procesów w inŜynierii sanitarnej wymaga zastosowaniaczujników słuŜących do pomiaru takich wielkości jak:• <strong>temp</strong>eratura,• ciśnienie lub róŜnicaciśnień,• wilgotność,• przepływ lub strumień,• prędkość przepływu,• ilość (licznik),• energia (licznik),• poziom cieczy,• entalpia,• jakości powietrza• zawartość CO 2 ,• zawartość O 2 ,• ruch i obecność,• zadymienie,• połoŜenie,• przekroczenie zakresu,• i inne.Pomiar kaŜdej wielkości wymaga zastosowaniadedykowanych elementów pomiarowych.
4.1. Zasada działania element. pomiarowychUrządzenia pomiarowe (czujniki) zamieniają mierzony parametr nawielkość uŜyteczną (zrozumiałą) dla <strong>UAR</strong> w postaciznormalizowanego sygnału np. elektrycznego.Sygnał wyjściowy czujnika jest proporcjonalny do aktualnej wielkościwartości mierzonej, rośnie i maleje wraz z nią w całym zakresiepomiarowym czujnika według znanej właściwości (charakterystykaczujnika).Przykład:zanurzeniowy czujnik<strong>temp</strong>eratury czynnikaTemperaturaczynnika °CZnormalizowanysygnał rezystancyjny kΩ4.2. Sygnały generowane przez e. pomiaroweW zaleŜności od potrzeb i moŜliwości przekazania danej informacjistosuje się czujniki generujące sygnały D lub A.Za pomocą sygnału analogowego (A)Za pomocą sygnału cyfrowego (D)Za pomocą sygnału cyfrowego (D)
4.3. Dobór elementów pomiarowychPrzy doborze czujnika naleŜy zwrócić uwagę na:• zakres pomiarowy• dokładność wskazania• rodzaj sygnałów wejściowych zastosowanego regulatora• stałą czasową czujnika• fizyczną moŜliwość zabudowy czujnika5. Stała czasowa czujnikaZmiana <strong>temp</strong>eratury, %120100806040200Ts = 2sTs = 7sTs = 47s0 20 40 Czas, 60s
5. Stała czasowa czujnikaWpływ stałej czasowej na jakość wskazań czujnika.parametr fizyczny(mierzony)czas6.1. Zanurzeniowy czujnik <strong>temp</strong>. cieczySposób zabudowy (montaŜu):
6.1. Zanurzeniowy czujniki <strong>temp</strong>. cieczyPrzetwornik<strong>temp</strong>eraturySygnał do<strong>UAR</strong>Pomiar <strong>temp</strong>eratury(element termoczuły)1. Mała bezwładność elementu pomiarowego (szybki odczyt zmian <strong>temp</strong>.)2. DuŜa dokładność odczytu (zanurzony w cieczy).3. Konieczność prac instalatorskich przy montaŜu.4. Istnieją równieŜ czujniki zanurzeniowe bez osłony.6.2. Przylgowy czujnik <strong>temp</strong>eratury cieczyPrzetwornik<strong>temp</strong>eraturyPomiar <strong>temp</strong>eratury(element termoczuły)Sygnał do<strong>UAR</strong>1. Bezwładność pomiaru (opóźnienie odczytu zmian <strong>temp</strong>eratury).2. Zakłócona dokładność odczytu (mierzy <strong>temp</strong>. ścianki przewodu).3. MontaŜ bez konieczność prac instalatorskich.4. Łatwość zmiany lokalizacji (przenoszenia czujnika).
6.3. Kanałowy czujnik <strong>temp</strong>. powietrzaDo pomiaru <strong>temp</strong>eratury powietrza w kanałach wentylacyjnychstosowane są czujniki kanałowe o małych stałych czasowych.Sposób zabudowy (montaŜu):Otwory - pomiar <strong>temp</strong>eratury(element termoczuły)6.4. Czujnik <strong>temp</strong>eratury wewnętrznejDo pomiaru <strong>temp</strong>eratury powietrza w pomieszczeniach stosowane sączujniki przystosowane do montaŜu na ścianie.Zamknięte są w obudowach zabezpieczających je przed uszkodzeniemi poprawiających estetykę zamontowanego czujnika.Zakres pomiarowy -15...+40°C.Mogą być wyposaŜone w wyświetlacz i nastwanik wartości zadanej.Czujniki te mogą być wyposaŜanedodatkowo w zadajniki <strong>temp</strong>eraturyoraz wyświetlacze wartości mierzonej.
6.4. Czujnik <strong>temp</strong>eratury wewnętrznejZasady montaŜu czujników<strong>temp</strong>eratury wewnętrznej w celuzapewnienia poprawności pomiaru:1. Na wysokości około 1,5m(w strefie przebywania ludzi).2. Nie na nasłonecznionej ścianie.3. Nie w pobliŜu źródeł ciepła.4. Nie w pobliŜu drzwi i okien.5. Najlepiej na ścianiewewnętrznej.6.5. Czujnik <strong>temp</strong>eratury zewnętrznejCzujniki do pomiaru <strong>temp</strong>eratury powietrza zewnętrznego posiadająkonstrukcję zabezpieczającą je przed niekorzystnym wpływemwilgoci oraz moŜliwość montaŜu na ścianach zewnętrznychbudynków.Przy wyborze miejsca montażu należywybierać ściany północne orazpółnocno-wschodnie eliminującbezpośredni wpływ nasłonecznieniai innych zysków ciepła na pomiar<strong>temp</strong>eratury powietrza.Zakres pomiarowy -30...+60°C.W układach wentylacyjnych <strong>temp</strong>eraturapowietrza zewnętrznego może być mierzonaczujnikiem kanałowym w kanale czerpni
6.6. Czujnik – sonda poziomu cieczySonda wykorzystuje zjawisko przepływu prąduelektrycznego przez niektóre media (np. woda).Po zanurzeniu elektrod, zaczyna płynąć prąd międzyelektrodą referencyjną (najdłuŜsza) i elektrodamipomiarowymi (poziom min i max).Typowe zastosowanie:• stacje oczyszczaniai neutralizacji ścieków,• zbiorniki przeciwpoŜarowe• stacje odsalania, zmiękczaniai uzdatniania wody• zbiorniki zasilające systemówogrzewania c.o.• kotły wodne, parowe, itp..6.6. Czujnik – sonda poziomu cieczyCzujnik max/min (3 elektrody)Czujnik wielopozioimowy (5 elektrod)
6.7. Pojemnościowy wskaźnik poziomuSonda działa jak kondensator: w miarę napełnianiazbiornika pojemność kondensatora rośnie .Sygnał ciągły (analogowy, 4…20mA) odpowiadającydokładnemu poziomowi cieczy w zbiorniku.Wymagana kalibracja w danym zastosowaniu.Wytyczne montaŜu:7. Elementy wykonawczeNapędy wraz z elementami wykonawczymi tworzą zespoły wykonawcze.SłuŜą one do automatycznej realizacji zadań regulacji, wykonywaniaczynności wynikających z rozkazów regulatora.W technice najczęściej stosowanymi napędami są:• SILNIKI pomp i wentylatorów• SIŁOWNIKI zaworów, klap i przepustnic
7.1. Silniki pomp i wentylatorówWyróŜnia się:• Silniki ze stałą prędkością obrotową• Silniki ze stopniową zmianą prędkości obrotowej• Silniki z płynną zmianą prędkości obrotowejSilniki elektryczne mogą być wyposaŜone w sygnalizator awarii (sygnał zwrotnyDO) lub/i sygnalizator stanu praca/stop (sygnał zwrotny DO).7.2. SiłownikiSłuŜą do automatycznego (bezobsługowego) sterowania otwieraniemzaworów, klap, przepustnic i innych. Realizują rozkazy regulatora.W praktyce stosuje się:• siłowniki elektryczne,• siłowniki elektrohydrauliczne,Sygnałz regulatora• siłowniki termoelektryczne,• siłowniki elektromagnetyczne,• siłowniki pneumatyczne,• siłowniki regulatorówbezpośredniego działania.Mzawór siłownikRuchsiłownika
7.2. Przykład: elektryczny siłownik zaworu• energia elektrycznaprzetwarzana jest na energięmechaniczną do napędzaniaelementu nastawczego• trzpień siłownika napędzanyjest silnikiem zapośrednictwem przekładniredukcyjnej zębatej o duŜymprzełoŜeniu• silniki o stałej prędkościobrotowej z moŜliwościązmiany kierunku obrotuOtwórzZamknijTrzpień zaworu7.3. Siłowniki przepustnicSłuŜą do automatycznego (bezobsługowego) sterowania otwieraniemprzepustnic. Realizują rozkazy regulatora.M
7.3. Przykład: elektr. siłownik przepustnicElement nastawczy wykonuje ruch obrotowy w zakresie od 0 do 90°zamykając i otwierając przepustnicę.7.6. Sterowanie pracą siłownikówZe względu na sposób pracy i sygnał sterujący wyróŜnia się:• Siłowniki proporcjonalne• Siłowniki dwustawne• Siłowniki trójstawneFunkcja bezpieczeństwa: spręŜyna zamykająca lub otwierając siłownik w wypadku zaniku zasilania.MoŜliwość przełączanie ze sterowania automatycznego na sterowanie ręczne.Istnieją siłowniki z sygnałem zwrotnym osiągnięcia krańcowej pozycji lub awarii oraz z nadajnikiemaktualnej pozycji siłownika. Pozwala to weryfikować pracę siłownika i wykrywać stany awaryjne.
7.7. Dobór siłownikówDobierając siłownik naleŜy zwrócić uwagę na:• siłę• nominalny skok• prędkośćoraz
1. RegulatoryRegulator jest urządzeniem zapewniającym zgodność przebiegu procesuz przebiegiem poŜądanym, czyli spełnienie podstawowego warunkuregulacji.W regulatorze następuje porównanie chwilowej wartości regulowanej(zmiennej kontrolowanej) „y” z wartością zadaną „w”.Odchyłka regulacji „e” (róŜnica między „w” i „y”) powoduje wytworzeniesygnału sterującego (wyjściowego) „u”, którego wartość zaleŜy odwielkości, czasu trwania oraz szybkości zmian odchyłki „e”.zakłócenia ZweRegulatoruCzłonwykonawczyObiektregulacjiyCzłonpomiarowy1. RegulatoryZadaniem sygnału sterującego u jest wywołanie zmianzmniejszających odchyłkę regulacji e do wielkości dopuszczalnej(e d ).Sygnał wyjściowy regulatora powinien mieć postać dogodną douruchomienia właściwych urządzeń wykonawczych.ywuzakłócenia ZweRegulatoruCzłonwykonawczyObiektregulacjiyCzłonpomiarowy
2.1. Podział według wielkości regulowanychPodział i nazewnictwo przeprowadza się według wielkości fizycznejjaką dany regulator reguluje w danym układzie (utrzymuje na stałympoziomie lub w zadanych granicach, zmienia ją według zadanegoprogramu lub dostosowuje do aktualnych potrzeb).Na tej podstawie wyróŜnia się:• regulatory <strong>temp</strong>eratury• regulatory wilgotności• regulatory ciśnienia• regulatory ilości• i inne(np. czynnika grzejnego)(np. powietrza nawiewanego)(np. w przepompowni)(np. strumienia masowego)2.2. Podział według energii pomocniczejPodział i nazewnictwo przeprowadza się według rodzajuenergii pomocniczej z zewnętrznego źródła jakiej dany regulatorwymaga dla poprawnej pracy (zasilanie).Na tej podstawie wyróŜnia się:• regulatory bez energii pomocniczej (bezpośredniego działania)• regulatory elektryczne• regulatory cyfrowe (mikroprocesorowe)• regulatory pneumatyczne• regulatory elektro-pneumatyczne• i inne
2.2. Podział według energii pomocniczejPrzykładyREGULATOR POZIOMUBEZPOSREDNIEGO DZIAŁANIAREGULATOR CIŚNIENIABEZPOSREDNIEGO DZIAŁANIA• REGULATOR CYFROWY(MIKROPROCESOWROWY)• REGULATOR PNEUMATYCZNY3.3. Podział według zachowania się w czasiePodział i nazewnictwo przeprowadza się według zachowania się wczasie regulatora. Czy funkcje regulacyjne są ciągłe czy nie.Na tej podstawie wyróŜnia się:• regulatory o działaniu nieciągłym• regulatory o działaniu ciągłymP (proporcjonalne), PI (proporcjonalno-całkujące),PID (proporcjonalno-całkująco-róŜniczkujące).Czasowe zachowanie się regulatorów jest najwaŜniejsze dla wyboruregulatora. Jest ono niezaleŜne od rodzaju wielkości regulowanej ienergii pomocniczej.
3.3. Podział według zachowania się w czasieREGULATORYO DZIAŁANIUCIĄGŁYMO DZIAŁANIUNIECIĄGŁYMtypu Ptypu PItypu PIDdwustawnetrójstawnePoprawne działanie układu regulacji (regulowanie obiektem) zaleŜy oddoboru odpowiedniego TYPU regulatora do konkretnego obiekturegulacji.4.1. Regulator ciągły typu PCharakterystyka skokowa regulatora typu P:Sygnał wejściowy mnoŜony przez współczynnik wzmocnienia k.Regulator posiada inercyjność o stałej czasowej T.k×eTy(t)ee(t)czas t
4.2. Regulator ciągły typu PICharakterystyka skokowa regulatora typu PI (P+I):Czas zdwojenia T i – czas po którym wielkość wyjściowa osiąga wartość dwarazy większą niŜ przyrost początkowy.2k×ey(t)k×eee(t)T iczas t4.3. Regulator ciągły typu PIDCharakterystyka skokowa regulatora typu PID (PI+D):T – stała czasowa członu róŜniczkującego, T d – czas wyprzedzenia2k×ey(t)k×eeTe(t)T iczas t
4.4. Nastawy regulatorów ciągłychWielkości k p , T i i T d noszą nazwę NASTAW REGULATORA.Nastawy danego regulatora moŜna nastawiać w pewnym przedzialewpływając na dynamiczne właściwości pracy regulatora.Zmieniając nastawy uzyskuje się róŜne przebiegi wielkości regulowanejdla jednego regulatora! Dostosowuje się go bez konieczności jegowymiany. Rozszerza to zakres jego stosowania i funkcjonalność.Zmieniając nastawy regulatora PID moŜna uzyskać np. regulatoryo mniej złoŜonej strukturze np. typu P (T d =0 i T i =∞).Odpowiednio dobrane nastawy umoŜliwiają uzyskanie minimalnejwartości wybranego wskaźnika jakości regulacji.Istnieje cały dział nauki zajmujący się doborem i optymalizacją nastawregulatorów w funkcji technicznej i ekonomicznej wydajności.4.5. Działanie w czasie P, PI, PIDOdpowiedź regulatorów typu P, PI i PID na identyczne zakłócenie.Proszę zwrócić uwagę na parametry jakości regulacji!
4.5. Działanie w czasie P, PI, PIDOdpowiedź regulatorów typu P, PI i PID na identyczne zakłócenie.Proszę zwrócić uwagę na parametry jakości regulacji!Typ P Typ PI Typ PID4.5. Działanie w czasie i nastawy P, PI, PIDOdpowiedź regulatorów typu P, PI i PID na identyczne zakłócenie.Proszę zwrócić uwagę na nastawy i parametry jakości regulacji!Typ P Typ PI Typ PID
4.6 Dobór typu regulatora o działaniu ciągłymW literaturze istnieje wiele wytycznych dotyczących właściwegowyboru typu regulatora dla danego typu obiektu. Przykładowo:Obiekt regulowanyZalecanytyp regulatoraDopuszczalnytyp regulatoraNiedozwolonytyp regulatoraObiekt całkujący PI IObiekt całkującyz inercjąObiekt inercyjnypierwszego rzęduObiekt inercyjnyz opóźnieniemObiekt inercyjnywyższego rzęduPIDIPIIPID I, PI PPID I, PI PObiekt opóźniający PI I P5.1. Regulator nieciągły dwustawnySygnał wyjściowy „u” regulatora dwustawnego moŜe przyjmować tylkodwie wartości: maksymalną i minimalną (np. załącz/wyłącz).Charakterystyka statyczna regulatora dwustawnego:u maxu miny=w-e dy=wy=w+e d
5.1. Regulator nieciągły dwustawnyPrzykład: Charakterystyka statyczna dwustawnego regulatora<strong>temp</strong>eratury w <strong>pomieszczeniu</strong>pomiar5.1. Regulator nieciągły dwustawnyPrzebieg wielkości regulowanej dwustawnie (<strong>temp</strong>eratura).Zwiększenie jakości regulacji powoduje częstsze przełączanie.Temp.222018Zał.Wył.t czast czas
5.1. Regulator nieciągły dwustawny1. Układy oparte na regulatorze dwustawnym cechują periodycznezmiany wielkości regulowanej, co jest ograniczeniem ichstosowania (np. „falowanie” <strong>temp</strong>eratury w <strong>pomieszczeniu</strong>).2. Regulatory te są prostej konstrukcji i są przez to tanie, co sprzyjaich rozpowszechnieniu.3. Najczęściej stosowane są jako regulatory <strong>temp</strong>eratury lub poziomu.4. W procesie regulacji wymagają podania wartości zadanej „w” i jejdopuszczalnej odchyłki „e d ” (lub histerezy „H”).5. Nadają się do sterowania urządzeń dwustanowych: załącz/wyłącz(np. pompy, nagrzewnice i grzejniki elektryczne).5.2. Regulator nieciągły trójstawnyCharakterystyka statyczna regulatora trójstawnego:wN - strefa nieczułości, H - strefa histerezy, w - wartość zadanaNp. regulacja <strong>temp</strong>eratury z wykorzystaniem procesu ogrzewania ichłodzenia.
5.2. Regulator nieciągły trójstawnyCharakterystyka statyczna regulatora trójstawnego:T,˚CN - strefa nieczułości, H - strefa histerezy, w - wartość zadanaNp. regulacja <strong>temp</strong>eratury z wykorzystaniem procesu ogrzewania ichłodzenia.6.2. Dobór regulatora np. cyfrowegoNaleŜy uwzględnić kryteria zarówno techniczne jak i ekonomiczne.Poprawnie dobrany do obiektu regulacji regulator powinien posiadać:1. Odpowiednie właściwości statyczne i dynamiczne.2. MoŜliwość przyłączenia niezbędnej ilości sygnałów wejściowychi wyjściowych I/O.3. MoŜliwość realizacji wszystkich niezbędnych funkcji z zakresuregulacji i sterowania obiektu.4. Dogodny sposób zabudowy i określone dopuszczalne parametryklimatu w otoczeniu regulatora.5. MoŜliwość współpracy w sieci z innymi regulatorami.6. MoŜliwość obsługi z panelu operatorskiego.7. Niezawodność pracy i dostępny autoryzowany serwis.
8. Szafa sterowniczo-zasilająca <strong>UAR</strong>DRZWI SZAFY STEROWNICZO-ZASILAJĄCEJ(WŁĄCZNIKI I LAMPKI)WNĘTRZE SZAFY STEROWNICZO-ZASILAJĄCEJWęzeł ciepłowniczy
Węzeł ciepłowniczyProdukcja paliw - brykieciarka
Przepompowanie ściekówŹródła ciepła, kotłownie
Oczyszczalnie ściekówUkłady chłodzące
9. Dobór elementów <strong>UAR</strong> - podsumowanieProcedura doboru elementów <strong>UAR</strong> (skrót):1. Rozpoznanie właściwości obiektu i urządzeń.2. Określenie wymagań regulacji.3. Dobór elementów pomiarowych (czujników).4. Dobór elementów wykonawczych.5. Zliczenie sygnałów I/O.6. Dobór regulatora.Typ, budowa, właściwości dynamiczne, aplikacje regulacyjne.7. MontaŜ i okablowanie.8. Oprogramowanie regulatora.Aplikacja gotowa, z katalogu lub stworzona od podstaw.9. Praca regulatora w sieciwspółpraca z innymi regulatorami, wymiana informacji, zarządzanie całymbudynkiem, BMS, BEMS.KONIEC