AUSGEO NEWS ISSUE 110 Jun 2013<strong>in</strong> communications, ground <strong>in</strong>frastructure and the expense of thereceivers have meant that this capability has not transferred <strong>to</strong> themass-consumer market. But this is set <strong>to</strong> change as the national GNSSnetwork is supplemented with more sites with better communicationl<strong>in</strong>ks, high quality user receivers become cheaper and analysistechniques become more sophisticated.Figure 1: An ideal antenna, no bias (modifed from Gerry Mader).Figure 2: A typical antenna, with bias (modifed from Gerry Mader).Modell<strong>in</strong>g antennabiasesIn the attempt <strong>to</strong> further <strong>improve</strong><strong>position<strong>in</strong>g</strong> <strong>accuracy</strong>, the geodeticcommunity have looked <strong>to</strong> eachand every error source and haveattempted <strong>to</strong> either elim<strong>in</strong>ate orbetter model that error. GNSSantenna biases are one such errorsource. All GNSS antennas havesmall <strong>in</strong>consistencies <strong>in</strong> theirelectronic components caused bythe manufactur<strong>in</strong>g process thatcurrently limit their <strong>accuracy</strong>(compare Figure 1 and Figure 2).This is where the robots come <strong>in</strong>:they provide a means <strong>to</strong> <strong>in</strong>vestigateand develop models of the antennabiases. Essentially, antenna biasesvary depend<strong>in</strong>g on the position ofeach <strong>satellite</strong> as they move acrossthe skyl<strong>in</strong>e (that is, the <strong>satellite</strong>’sazimuth and elevation). By rotat<strong>in</strong>gand tilt<strong>in</strong>g the GNSS antennawith a robot as it tracks the GNSS<strong>satellite</strong>s, a highly accurate model ofthe antenna bias can be determ<strong>in</strong>ed(Figure 3). By apply<strong>in</strong>g the modelsderived from the robotic system,these biases can be removed and thepositional <strong>accuracy</strong> <strong>improve</strong>d.The GNSS research communityhave up until recently used genericantenna models for antenna types.However, with the ever grow<strong>in</strong>g<strong>accuracy</strong> requirements of GNSSusers, <strong>in</strong>dividual antenna-specificmodell<strong>in</strong>g is necessary <strong>to</strong> further<strong>improve</strong> <strong>position<strong>in</strong>g</strong> <strong>accuracy</strong>.Antenna-specific models can onlybe derived us<strong>in</strong>g robotic calibrationsystems or prohibitively expensiveanechoic chambers, neither ofwhich was available <strong>to</strong> researchers<strong>in</strong> <strong>Australia</strong>, until now.<strong>Robots</strong> <strong>to</strong> <strong>improve</strong> <strong>satellite</strong> <strong>position<strong>in</strong>g</strong> <strong>accuracy</strong> <strong>in</strong> <strong>Australia</strong> www.ga.gov.au/ausgeonews/ | 2
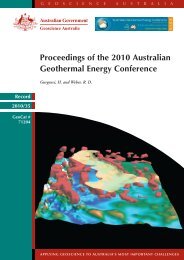
AUSGEO NEWS ISSUE 110 Jun 2013Figure 3: Antenna calibration solution plot.Our robotsGNSS antenna calibration is a niche and highly specialised activity.Geoscience <strong>Australia</strong> is the home <strong>to</strong> one of five GNSS antennacalibration capabilities <strong>in</strong> the world and the only one <strong>in</strong> the southernhemisphere. The other four are at the National Geodetic Survey(Virg<strong>in</strong>ia, USA), University of Bonn (Bonn, Germany), SenB (Berl<strong>in</strong>,Germany), Geo++ (Hannover, Germany) and the Institute of Geodesy(IfE) (Hannover, Germany). The smaller of the two Geoscience<strong>Australia</strong> robots was purchased from Germany and its primary rolewill be <strong>to</strong> calibrate antennas prior <strong>to</strong> them be<strong>in</strong>g used <strong>in</strong> the field sothe positions they record are free from antenna modell<strong>in</strong>g bias. Thelarger of the two robots is unique <strong>to</strong> GNSS calibrations globally andwill enable experiments <strong>to</strong> assess the impact of station and antennadesign on <strong>position<strong>in</strong>g</strong> <strong>accuracy</strong>. Furthermore, it has a lift<strong>in</strong>g capabilitylarge enough <strong>to</strong> support the calibration of GNSS <strong>satellite</strong> transmittersprior <strong>to</strong> launch and the speed and agility <strong>to</strong> replicate the movement aGNSS station would experience <strong>in</strong> an earthquake.Improvements for science, <strong>in</strong>dustry andthe publicScientific and <strong>in</strong>dustrial GNSS users require high <strong>accuracy</strong> and <strong>in</strong>tegrityfor applications <strong>to</strong> fields such as environmental moni<strong>to</strong>r<strong>in</strong>g, crustalmotion, m<strong>in</strong><strong>in</strong>g and construction. The <strong>improve</strong>ments provided byabsolute antenna modell<strong>in</strong>g will allow these users <strong>to</strong> acquire positionsan order of magnitude more accurately than they could of <strong>in</strong> the past.A new nationalcoord<strong>in</strong>ate systemThe current <strong>Australia</strong>n geodeticdatum, the Geocentric Datumof <strong>Australia</strong> 1994 (GDA94)was established <strong>in</strong> the 1990s,has relatively poor <strong>in</strong>ternal<strong>accuracy</strong>, weak l<strong>in</strong>kages <strong>to</strong> thelatest global coord<strong>in</strong>ate system,and is ‘frozen’ at an epoch dateof 1994. It will be unable <strong>to</strong>support the next generation ofGNSS services and the manyscientific endeavours that requireaccurate <strong>position<strong>in</strong>g</strong>, <strong>in</strong>clud<strong>in</strong>gsea level rise studies. The roboticcalibration facility will enable anupgrade of Geoscience <strong>Australia</strong>’snational GNSS network whichwill underp<strong>in</strong> an update of the<strong>Australia</strong>n geodetic datum.An <strong>improve</strong>dunderstand<strong>in</strong>g ofearthquake hazardEarthquakes <strong>in</strong> <strong>Australia</strong>occur after the long-termaccumulation of stra<strong>in</strong> onfaults that is subsequentlyreleased. Over the last decadescientists have suggested thatprecise GNSS observations ofcrustal motion might provide<strong>in</strong>sights <strong>in</strong><strong>to</strong> this seismiccycle. Towards this objective,Geoscience <strong>Australia</strong>, <strong>to</strong>getherwith our State Governmentcounterpart agencies, haveestablished moni<strong>to</strong>r<strong>in</strong>g networks<strong>in</strong> the seismically active areas of<strong>Australia</strong> <strong>in</strong>clud<strong>in</strong>g the southwestseismic zone near Perth <strong>in</strong>Western <strong>Australia</strong>, the Fl<strong>in</strong>dersRanges near Adelaide <strong>in</strong> South<strong>Robots</strong> <strong>to</strong> <strong>improve</strong> <strong>satellite</strong> <strong>position<strong>in</strong>g</strong> <strong>accuracy</strong> <strong>in</strong> <strong>Australia</strong> www.ga.gov.au/ausgeonews/ | 3