Computer Techniques for Use in Ship Hull Vibration Analysis and ...
Computer Techniques for Use in Ship Hull Vibration Analysis and ...
Computer Techniques for Use in Ship Hull Vibration Analysis and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
— -———___————I.il-----K-3
❑Several types of computer programsare suitable <strong>for</strong> this analysis. The systemcan be broken down to a sequence ofmasses connected by spr<strong>in</strong>gs. This canbe analyzed by a Holzer Table program,the k<strong>in</strong>d developed <strong>for</strong> torsional vibration,or by a st<strong>and</strong>ard f<strong>in</strong>ite elementprogram such as ANsYS, MARC, STARDYNE,NASTRAN, SESAN, etc. However, the shaft<strong>in</strong>g,“hose distributed weight is severaltimes that of the propeller with its associatedwater <strong>in</strong>ertia, consists of longlengths of constant diameter. Thischaracteristic is encourag<strong>in</strong>g to a programthat represents the shaft as distributedmass <strong>and</strong> elasticity, <strong>and</strong> a fewcomputer programs have been developedwhich utilize this property. In such acase the system can be def<strong>in</strong>ed with am<strong>in</strong>imum of <strong>in</strong>put variables, thus sav<strong>in</strong>gtime <strong>and</strong> improv<strong>in</strong>g accuracy <strong>and</strong> reduc<strong>in</strong>gthe probability of erroneous <strong>in</strong>puts.The follow<strong>in</strong>g appendices taken fromReference (25) <strong>in</strong>dicate that the MaritimeAdm<strong>in</strong>istration has a program (Appendix14-1) based upon the Holzer Method<strong>for</strong> determ<strong>in</strong><strong>in</strong>g longitud<strong>in</strong>al vibrations;that J. J. McMullen has a program(Appendix 14-2) <strong>for</strong> determ<strong>in</strong><strong>in</strong>g longitud<strong>in</strong>alvibration “here the sha.ft is model -ed as lumped masses; <strong>and</strong> that NewportNews has a program (Appendix 14-3) thatcan represent the shaft as a distributedmass system. A Littleton Research programutiliz<strong>in</strong>g lumped <strong>and</strong> distributedmasses <strong>and</strong> elasticities is described <strong>in</strong>Appendix 14-4. Reference (26) conta<strong>in</strong>sresults of a survey <strong>for</strong> ship structurecomputer programs made <strong>in</strong> 1974.Determ<strong>in</strong>e Forced Response of Mach<strong>in</strong>erySpace - [Box 1The shaft<strong>in</strong>g system is connected <strong>in</strong>longitud<strong>in</strong>al vibration to the mach<strong>in</strong>eryspace double bottom through the thrustbear<strong>in</strong>g. Thus, vibrations of the shaftwill be coupled with those <strong>in</strong> the mach<strong>in</strong>eryspace, <strong>and</strong> vibrations <strong>in</strong> the mach<strong>in</strong>eryspace bottom structure can bestrongly coupled with longitud<strong>in</strong>al vibrationof the shaft<strong>in</strong>g. Although itmight be desirable to model the doublebottom as an anisotropic plate with variable<strong>in</strong>ertias <strong>for</strong> the same reasons thatthe distributed mass-elasticity procedureis used <strong>for</strong> the shaft<strong>in</strong>g, this typeof model has not been developed, <strong>and</strong> itis necessary to use f<strong>in</strong>ite element model<strong>in</strong>g.It is desirable that the comp”-ter system that is used be compatiblewith that used <strong>for</strong> the complete ship.Tf the f<strong>in</strong>al ship is to be modeled byf<strong>in</strong>ite element procedures, the same systemshould be used <strong>for</strong> the mach<strong>in</strong>eryspace, which can then be <strong>in</strong>corporated <strong>in</strong>the full model as a substructure. Ifthe complete ship is to be modeled as aTimoshenko beam with sprung masses, anyconvenient f<strong>in</strong>ite element model can beused <strong>for</strong> the mach<strong>in</strong>ery space.Determ<strong>in</strong>e Forced Response of the shaft<strong>in</strong>q<strong>in</strong> the Lateral Direction Assunung aRigid <strong>Hull</strong>; i.e. , Rigid F<strong>in</strong> Support atBear<strong>in</strong>gs - [Box 16]The shaft responds laterally to theharmonic <strong>for</strong>ce <strong>and</strong> moment excitationsabout axes normal to the rotational axis.If the lateral natural frequencies ofthe propeller <strong>and</strong> shaft system co<strong>in</strong>cidewith the blade frequency excitation, the<strong>in</strong>put to the hull through the bear<strong>in</strong>gscan be strongly amplified. Calculationsof ship response generally show peaksassociated with lateral frequencies ofthe shaft<strong>in</strong>g. It is, there<strong>for</strong>e, desirableto design the shaft<strong>in</strong>g system sothat these resonances will not occur atthe normal operat<strong>in</strong>g speeds. As withthe longitud<strong>in</strong>al vibrations, these studiesare successively made on models of<strong>in</strong>creas<strong>in</strong>g complexity. The first studiesare applied to the shaft simply supportedat the bear<strong>in</strong>gs (either at the<strong>for</strong>ward <strong>and</strong> after edges or one-third ofthe distance from the rear of the sternbear<strong>in</strong>g ). S<strong>in</strong>ce it is known that thebear<strong>in</strong>gs are relatively flexible, thismodel will generally give a frequencythat is high so that if the lo”est lateralfrequency is less than, say, 30percent above the full power blade frequency,it will probably be wise to considerrelocat<strong>in</strong>g the bear<strong>in</strong>gs or modify<strong>in</strong>gthe shaft<strong>in</strong>g to raise the frequency.A f<strong>in</strong>ite element computer program issuitable <strong>for</strong> this analysis. It is alsowssible to use beam programs which <strong>in</strong>cludethe effects of hull flexibility.The support<strong>in</strong>g structures can be modeledby mak<strong>in</strong>g the supports very stiff orrigid. These programs are discussed <strong>in</strong>the next section.Determ<strong>in</strong>e the Lateral Responses of theShaft<strong>in</strong>g Includ<strong>in</strong>g the Effects of nullFlexibility - [Box 17]If gyroscopic effects are neglected(they are im~rt.ant <strong>for</strong> whirl<strong>in</strong>g, butrelatively unimportant at blade frequencies)<strong>and</strong> the supports are of equalstiffness <strong>in</strong> all directions, the naturalfrequency <strong>and</strong> response of the shaft willbe the same <strong>in</strong> all directions. If thestructure is symmetrical about a verticalaxis <strong>and</strong> gyroscopic effects are neglected,the shaft will have two naturalfrequencies <strong>and</strong> correspond<strong>in</strong>g modeshapes, one vertical <strong>and</strong> one horizontal. “If the structure is not symmetrical, thefundamental normal modes will be skewedto the vertical, but at right angles toeach other. The moment restra<strong>in</strong>t at thebear<strong>in</strong>gs can have a significant <strong>in</strong>fluenceon the shaft frequency. .The amount of structure to <strong>in</strong>clude<strong>in</strong> the stiffness calculation is a matter<strong>for</strong> the analyst’s judgement. Theobject is to evaluate the stiffness toa region of a large hull mass. Fox as<strong>in</strong>gle screw ship, this may <strong>in</strong>volve theK-6 +-
structure fmm the after peak bulkhead<strong>and</strong> up to the steer<strong>in</strong>g gear flat. Forshafts supported by struts, it will <strong>in</strong>cludethe struts <strong>and</strong> their backup structure.If the complete hull is analyzedus<strong>in</strong>u a f<strong>in</strong>ite element analvsis [Boxes20 a;d 211, the validity of- the model<strong>in</strong>gcan be tested.S<strong>in</strong>ce the structure support<strong>in</strong>g theshaft bear<strong>in</strong>gs is complicated, the useof f<strong>in</strong>ite element methods is the mostfeasible way of determ<strong>in</strong><strong>in</strong>g tbe supportstiffness. The stiffness between theshaft <strong>and</strong> bear<strong>in</strong>g of a stave bear<strong>in</strong>g canbe quite low if the staves are rubber.Tbe stiffness of an oil film bear<strong>in</strong>g issuch that a bear<strong>in</strong>g <strong>for</strong>ce <strong>in</strong>troduces amotion hav<strong>in</strong>g a component perpendicularto the load.If, as a result of tbe calculationsof shaft response, it is found thatthere are no shaft resonances near theoperat<strong>in</strong>g speeds of the ship, the shaft<strong>in</strong>gcan be considered satisfactory <strong>for</strong>this level of ref<strong>in</strong>ement. Later analysesof the whole ship will confirm itssuitability. If, on the other h<strong>and</strong>,lateral resonances appear close to theoperat<strong>in</strong>g speed, then by chang<strong>in</strong>g one ormore of the follow<strong>in</strong>g, a new propulsionsystem can be developed which has resonancesproperly located:1. The overhang of the propeller beyondthe stern bear<strong>in</strong>g.2. Tbe span between the last two bear<strong>in</strong>gssupport<strong>in</strong>g the propeller shaft.3. The diameter of the propeller shaft.4. The support of the propeller shaftbear<strong>in</strong>g:(a)(b)(c)(d)The skeg <strong>and</strong> stern tube structure<strong>for</strong> a s<strong>in</strong>gle screw shiphav<strong>in</strong>g a skeg supported bear<strong>in</strong>g.The angles, size, attachmentto the bear<strong>in</strong>g barrel of thearms carry<strong>in</strong>g a strut bear<strong>in</strong>g<strong>for</strong> open screw ships.The structure support<strong>in</strong>g strutarms .Other changes as <strong>in</strong>dicated bythe calculations.Such changes are frequently required,<strong>and</strong> good judgement, often us<strong>in</strong>g analysesof simple models, is required to discoverthe optimum solution rapidly <strong>and</strong> <strong>in</strong>expensively.Appendices 17-1 <strong>and</strong> 17-2 present<strong>in</strong><strong>for</strong>mation on two computer programsused <strong>for</strong>.the analysis of transversepropeller shaft<strong>in</strong>g vibration.Conduct Superstructure Modal <strong>Analysis</strong> -[BOX 18]In addition to substr”ct”res of theshaft<strong>in</strong>g <strong>and</strong> mach<strong>in</strong>ery spaces, it is desirableto make a study of the superstructureas a subsystem s<strong>in</strong>ce resonances<strong>in</strong> this region are a freguentcause of vibration troubles. F<strong>in</strong>iteelement methods are generally most suitable<strong>for</strong> model<strong>in</strong>g this structure by consider<strong>in</strong>git to be attached to a rigidstrength deck. With the high superstructurescommon on conta<strong>in</strong>er ships <strong>and</strong> verylong ships, some superstructures vibrate<strong>for</strong>e <strong>and</strong> aft as a cantilever beam. Onothers the decks vibrate symmetricallywith<strong>in</strong> the sides, while on still othersthe decks vibrate anti-symmetrically(port up, starboard down) so that thef<strong>in</strong>ite element model should not be toocoarse to suitably represent the complexityof possible modes. Clearly themost suitable programs <strong>for</strong> these analysesare f<strong>in</strong>ite element programs.It may be desirable to make substructuralstudies of other portions ofthe ship such as the rudder born subsystemor systems <strong>in</strong>volv<strong>in</strong>g stern crane orelevator carriers. It might also be desirableto comb<strong>in</strong>e two or more smallersubsystems. For example, the lateralshaft <strong>and</strong> substructure subsystem can beconnected to the longitud<strong>in</strong>al shaft <strong>and</strong>mach<strong>in</strong>ery space subsystem to <strong>for</strong>m a largercomb<strong>in</strong>ed subsystem.When the subsystems have been designedso that it is expected that theywill be free of vibration resonances, itis time to make a vibration analysis ofthe complete ship. This analysis of thefull ship fulfills two important functions:1. It checks <strong>and</strong> confirms the validityof the boundaries assumed <strong>for</strong> thesubstructures.2. By model<strong>in</strong>q the ship as a whole, itis possible, with the proper damp<strong>in</strong>g,to predict the vibration levels<strong>in</strong> all parts of the ship as afunction of frequency. Compar<strong>in</strong>gthese predictions with establishedacceptable levels allows an assessmentof acceptability of the shipa,ta po<strong>in</strong>t <strong>in</strong> construction wherecorrections <strong>and</strong> changes to overcomeserious difficulties can be determ<strong>in</strong>ed<strong>and</strong> <strong>in</strong>corporated <strong>in</strong> the desiqn.Assemble Model of Entire <strong>Ship</strong> <strong>and</strong> Determ<strong>in</strong>e<strong>Vibration</strong> ?unplitudes <strong>and</strong> StressLevels of the Compl ete <strong>Ship</strong> - [Boxes 20<strong>and</strong> 21]Reference (8) <strong>in</strong>dicates that undersome conditions the complete ship may besatisfactorily modeled as a beam structureUslncj a TunosnenKO Beam as a base.K-7
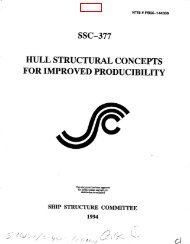
For vertical vibration the ship may bemodeled as parallel beams elasticallyconnected <strong>and</strong> carry<strong>in</strong>g sprung weights.For lateral vibrations the bend<strong>in</strong>g isstrongly coupled with torsion, <strong>and</strong> so acoupled model is required. Strictlyspeak<strong>in</strong>g, the vertical bend<strong>in</strong>g should becoupled with axial vibration of the ship,<strong>and</strong> this is probably advisable if theblade frequency approaches an estimatedlongitud<strong>in</strong>al frequency of the ship.Nhere these conditions cannot bemet, it is necessary to model the shipby f<strong>in</strong>ite element methods <strong>in</strong> order toobta<strong>in</strong> reliable estimates of response.Although heavy vibrations of twice<strong>and</strong> three times blade frequency can bemeasured on ships, the methods of analysisthat are presented <strong>in</strong> this paper arefeasible only <strong>for</strong> the range of the fundamentalblade frequency, except <strong>for</strong> unusualcases.As an example of a ship modeled <strong>in</strong>terms of beams, consider Figure 2, anuncoupled vertical vibration model, <strong>and</strong>Figure 3, a coupled lateral-torsionalvibration model. A f<strong>in</strong>ite element model<strong>for</strong> half a shiD (because of svmmetrv.only half need” be represented is siiwn<strong>in</strong> Figures 4 <strong>and</strong> 5.For the analysis of structures ascomplex as shown <strong>in</strong> Figures 2 <strong>and</strong> 3, thecomputer program GBRP (General Bend<strong>in</strong>gResponse Program) developed at the Naval<strong>Ship</strong> Research <strong>and</strong> Development Center (27)should be used. In the analysis of theship hull, it can treat vertical as wellas coupled lateral-torsional vibration.These capabilities <strong>and</strong> other features ofthe program are described <strong>in</strong> Appendix20-1.To def<strong>in</strong>e the elastic properties ofthe strwcture, it is necessary to def<strong>in</strong>ethe cross-sectional elastic properties.A program <strong>and</strong> procedure <strong>for</strong> comput<strong>in</strong>gI Y1=1 yzA(Moment of <strong>in</strong>ertia about transverseaxis)(Moment of <strong>in</strong>ertia about verticalaxis )(Product of <strong>in</strong>ertia relative tohorizontal <strong>and</strong> vertical axes)(Cross-sectionalarea)? (Transverse Coord<strong>in</strong>ate of neutralaxis)y’, z’ (COOrd<strong>in</strong>ates of tbe shear centerof the section)is given <strong>in</strong> Reference (28). ‘This programcalculate.s the equivalent beam parameters<strong>for</strong> the ship section propertiesus<strong>in</strong>g data tabulations obta<strong>in</strong>ed fromhull plans by a preestablished orderlyprocedure.U.S. Steel Eng<strong>in</strong>eers <strong>and</strong> Consultants,Inc. , developed a program thatrepresents a ship as a beam on an elasticfoundation. In<strong>for</strong>mation on thisprogram is given <strong>in</strong> Appendix 20-2.Other vibration programs based upn model<strong>in</strong>gthe hull as beams have been developedby Lloyd’s Registry of <strong>Ship</strong>p<strong>in</strong>g <strong>and</strong>by Dr. Ing. E. Metzmeier of the InstitutftirSchiffstechnik <strong>in</strong> Berl<strong>in</strong>, FederalRepublic of Germany. These programsare briefly described <strong>in</strong> Appendix 20-3.The factors that enter <strong>in</strong>to thechoice of the number <strong>and</strong> location of thesubdivisions of the hull structwe areconsidered <strong>in</strong> Reference (8). The advantageof represent<strong>in</strong>g a ship by a beammodel is that the computer analysis ismore direct <strong>and</strong> more easily <strong>in</strong>terpreted<strong>and</strong> is considerably less expensive thanthat with a f<strong>in</strong>ite element analysis <strong>for</strong>a structure that is as well def<strong>in</strong>ed.Tbe disadvantages are that <strong>for</strong> many shipvibration problems, particularly wherethe decks are open so that tbe vibrationacross the width of tbe ship is important,the beam representation of theship is <strong>in</strong>adequate <strong>and</strong> a f<strong>in</strong>ite elementprocess is required <strong>for</strong> satisfactorymodel<strong>in</strong>g.The use of f<strong>in</strong>ite element methods<strong>for</strong> predict<strong>in</strong>g ship vibrations is becom<strong>in</strong>gwidespread. Some organizations havedeveloped f<strong>in</strong>ite element programs specifically<strong>for</strong> shiD aDDlicatiOns. Amonclthese sh&ld be m&ti&ed SESAM-69 (AP:pendix 2O-3) developed by Det norskeVeritas, the Norwegian classificationsociety (29), <strong>and</strong> DASH (Appendix 20-3)developed by the Netherl<strong>and</strong>s <strong>Ship</strong> ResearchCenter. Bureau Veritas, theFrench classification society, has mademany f<strong>in</strong>ite element analyses of shipstructures. They do not supply <strong>in</strong><strong>for</strong>mationon the characteristics of theirprogram.KXZAKxYAJxz(Shear area constant verticalplane](Shear area constant transverseplane)(Torsional area constant aboutlongitud<strong>in</strong>al axis )(Vertical coord<strong>in</strong>ateneutral axis)of theThe Electric Boat Division of GeneralDvnamics Corporation develoued <strong>and</strong>ma<strong>in</strong>ta<strong>in</strong>s a f<strong>in</strong>it; element compu~er programGENSAM <strong>for</strong> use on submar<strong>in</strong>e vibrationproblems. In<strong>for</strong>mation on this is 1’presented <strong>in</strong> Appendix 20-3.S<strong>in</strong>ce the cost of develop<strong>in</strong>g, ma<strong>in</strong>ta<strong>in</strong><strong>in</strong>g,<strong>and</strong> updat<strong>in</strong>g a large f<strong>in</strong>iteelement computer program is high, it iscommon to apply general purpose computer[-8“L
,I II IFIGURE 4. ELEVATION VIEW OF FINITE ELEMENT MODELFIGURE 5. ROTATED VIEW OF FINITE ELEMENT MODEL.K- 10
14.15,16.17.18.19.20.21.22.23.24,25.S. Tsakonas <strong>and</strong> W. R. Jacobs, “Documentationof a <strong>Computer</strong> Program<strong>for</strong> the Pressure Distribution Forces<strong>and</strong> Moments cm <strong>Ship</strong> Propellers <strong>in</strong><strong>Hull</strong> Wakes, ,,Stevens Institute ofTechnology, Davidson LaboratoryRept. SIT-DL-76-1863 .N. A. Brown, “Periodic PropellerForces <strong>in</strong> Non-uni<strong>for</strong>m Flow, ‘uMassachusettsInstitute of Technology,Dept. of Naval Architecture <strong>and</strong> Mar<strong>in</strong>eEng<strong>in</strong>eer<strong>in</strong>g Rept. 64-7, 1964.0. Frydelund <strong>and</strong> J. E. Kerw<strong>in</strong>, ‘,TheDevelopment of Numerical Methods<strong>for</strong> the Comp”taticm of unsteadyPropeller Forces, ,,Symposium onHydrodynamics of <strong>Ship</strong> <strong>and</strong> OffshorePropulsion Systems, Det norske Veritas,oslo, Norway, March 1977.M. T. Murray <strong>and</strong> J. E. T“bbyr“Blade-Rate Force Fluctuations ofa Propeller <strong>in</strong> Non-Uni<strong>for</strong>m Flow, ,,Admiralty Research Laboratory, ARL/M/P33A, June 1973.P. van Oossanen <strong>and</strong> J. van der Kooy,‘“Vibratory <strong>Hull</strong> Forces Induced byCavitat<strong>in</strong>g Propellers, ,STrans . RoyalInstitute of Naval Architects,vol. 115, 1973.w. S. Vorusr “A Method <strong>for</strong> Analyz.<strong>in</strong>g the Propeller-Induced VibratoryForces Act<strong>in</strong>g on the Surface of a<strong>Ship</strong> Stern, “ Trans. SNAME, vol. 82,1974.M. Yildiz <strong>and</strong> O. K. Mawardi, “onthe Diffraction of Multiple Fieldsby a Semi-Inf<strong>in</strong>ite Rigid Wedge, ,,Journal Acoustical Society of America,vol. 2, ~—No.M. Yildez <strong>and</strong> O. K. M.?nr?.rdi,~,Dif -fracticm of a Dipole Field by aRigid Cone (Abstract) ,‘uJournalAcoustical Society of wn~vol.32, No. 12, 1960.P. van Oossanen, “Theoretical Predictionof cavitation on proneI -lers,’s Mar<strong>in</strong>e Tecimml.og , voi. 14,No.H. Schawanecke, ,,Compari son o fMethods <strong>for</strong> the Calculation of wakeInduced Propeller Blade Excit<strong>in</strong>gForces, “ International Tow<strong>in</strong>g TankConference, Ottawa, Canada, PaperNo. 13, 1975.“Longitud<strong>in</strong>al Stiffness of Ma<strong>in</strong>Thrust Bear<strong>in</strong>g Foundations, ‘uSNAMETechnical <strong>and</strong> Research Report R-15,Sept. 1972.The National <strong>Ship</strong>build<strong>in</strong>g ResearchProgram - Research on <strong>Computer</strong> Applicationsto <strong>Ship</strong>build<strong>in</strong>g VII,26..27.28.29.30.31.32.33.34.catalog of Program Abstracts - u.s.Dept. of commerce, Maritime Adm<strong>in</strong>istration,<strong>in</strong> cooperation with AvOndale<strong>Ship</strong>yards, Inc. , May 1975.R. F. Jones, Jr. , “<strong>Ship</strong> Structures, “Structura~ Mechanics computer Pro-=, Edited by W. Pilkey, et al. ,University of Virg<strong>in</strong>ia Press, Charlottesville,1974.M. E. Golden <strong>and</strong> F. M. Henderson,“An Updated Guide to the <strong>Use</strong> ofGeneral Bend<strong>in</strong>g Response Program(GBRP),‘,Computation <strong>and</strong> MathematicsDept. Research <strong>and</strong> DevelopmentRept. 4601, Naval ship Research <strong>and</strong>Development Center, Bethesda, Md. ,April 1975.R. C. Leibowitz <strong>and</strong> R. L. Harder,‘Mechanized Computation of <strong>Ship</strong> Parameters,” David Taylor Model Bas<strong>in</strong>Rept. 1841, June 1965.0. Egel<strong>and</strong> <strong>and</strong> P. 0. Araldsen,,,sE$m-~g _ A General purpose F<strong>in</strong>iteXlement Method Program, ‘u<strong>Computer</strong>s<strong>and</strong> Structures, vol. 4,=41-68, Pergamon Press, 1974.J. E. Kerw<strong>in</strong>, “<strong>Computer</strong> <strong>Techniques</strong><strong>for</strong> Propeller Blade Section Designs,” International <strong>Ship</strong>build<strong>in</strong>g20, No. 227, JUlyP ‘0’“S. Tsakonas, W. R. Jacobs, <strong>and</strong> M. R.Ali, ,,Documental ion <strong>for</strong> the CompleteProgram <strong>for</strong> tbe PressureField Generated by a Propeller <strong>in</strong>a Variable Inflow, “ Stevens Instituteof Technology, Davidson LaboratoryRept. 1910, May 1977.R. G. Kl<strong>in</strong>e, R. W. Clough, <strong>and</strong> D.Kavlio, “Propel ler-Excited <strong>Vibration</strong>s,’,SNAME, Northern Cali<strong>for</strong>niaLocal Section, March 1971.Lloyd, s Register, Development UnitReport No. 131.S. Hylariades, “DASH, <strong>Computer</strong>sr~gram <strong>for</strong> Dynamic <strong>Analysis</strong> Of<strong>Ship</strong> <strong>Hull</strong> s,” Netherl<strong>and</strong>s <strong>Ship</strong> ResearchCenter Rept. No. 159/S, NSMBPublication 367, Sept. 1971.K-12
APPENDIX 4-1. LONGITUDINAL VIBBATIONOF SHAFTING, 1Program Developed <strong>and</strong> <strong>Use</strong>d by LittletonResearch <strong>and</strong> Eng<strong>in</strong>eer<strong>in</strong>g CorporationOutputIn<strong>for</strong>mationA plot of natural frequency of theshaft<strong>in</strong>g system as a function of thestiffness of the thrust bear<strong>in</strong>g <strong>and</strong> itsfoundation. Alternatively, if thethrust bear<strong>in</strong>g stiffness is known, thevariable may be the foundation stiffness.InputIn<strong>for</strong>mation1. Shaft<strong>in</strong>g arrangement, diameters,<strong>and</strong> lengths.2. Propeller mass, diameter, numberof blades, pitch, <strong>and</strong> developedarea ratio (or mean width ratio) .Basis<strong>for</strong> CalculationThe propeller is represented by itsweight <strong>and</strong> the weight of entra<strong>in</strong>ed wateras given by Lewis <strong>and</strong> Auslaender. Theshaft is represented by a distributedmass <strong>and</strong> elasticity. The gear<strong>in</strong>g <strong>and</strong>turb<strong>in</strong>es <strong>for</strong>ward of the thrust bear<strong>in</strong>gare not <strong>in</strong>cluded.This is a proprietary program notdeveloped <strong>for</strong> general distribution.APPENDIX 6-1. PROPELLER MEAN ANDVIBBATORY FORCES PROGRAMProgram Developed by Davidson Laboratory,Stevens Institute of Technology,under U.S. Navy contracts; “idely used.OutputIn<strong>for</strong>mation1. Steady <strong>and</strong> time-dependent bladeload<strong>in</strong>g distribution at multiplesof shaft frequency.2. Mean <strong>and</strong> blade-frequency <strong>for</strong>ce <strong>and</strong>moment components <strong>in</strong> coefficient<strong>for</strong>m <strong>for</strong>:where(a)(b)Thrust/on2d4Torque/pn2d5(c) Transverse <strong>for</strong>ce/pn2d4[d) Vertical <strong>for</strong>ce/on2d4(e) Transverse bend<strong>in</strong>g moment/~n2d5(f) Vertical bend<strong>in</strong>g moment/on2d5o = fluid densityn . propeller rpmd = propeller diameter3. Blade bend<strong>in</strong>g moments about thepitch l<strong>in</strong>e at various radial posi -t+ons <strong>and</strong> <strong>for</strong> various orders of excitation.4. In<strong>for</strong>mation <strong>for</strong> the study of cavitation<strong>in</strong>ception.5. In<strong>for</strong>mation <strong>for</strong> tbe study of bladestress analysis which is per<strong>for</strong>medby utiliz<strong>in</strong>g the STARDYNE-CDC f<strong>in</strong>iteelement computer program.InputIn<strong>for</strong>mation1. The propeller blade geometry.2. The Fourier components of the spatialvariation of the axial <strong>and</strong> tangentialcomponents of the wake.Basis<strong>for</strong> CalculationThe program uses unsteady lift<strong>in</strong>gsurfacetheory <strong>and</strong> takes <strong>in</strong>to considerationall the relevant propeller qeometry<strong>and</strong> the spatial nonuni<strong>for</strong>mity of the <strong>in</strong>flowfield.The program is available throughDavidson Laboratory <strong>for</strong> $6,000. See Reference(14).APPENDIX 6-2. HAPMONIC FORCES AND MO-NENTS GENERATED BY A PROPELLER IN NON-UNIFORM FLOWProgram Developed <strong>and</strong> <strong>Use</strong>d by LittletonResearch <strong>and</strong> Eng<strong>in</strong>eer<strong>in</strong>g CorporationOutputIn<strong>for</strong>mation1. Magnitude <strong>and</strong> phase of the threecomponents of harmonic propeller<strong>for</strong>ce <strong>and</strong> the three components ofharmonic propel ler moment.2. The steady vertical <strong>and</strong> horizontal<strong>for</strong>ces <strong>and</strong> moments aris<strong>in</strong>g fromfirst-order “ake action (thrustoffset) .InputIn<strong>for</strong>mation1. Propeller dra”<strong>in</strong>g.The propeller draw<strong>in</strong>g should showthe fol low<strong>in</strong>g <strong>in</strong><strong>for</strong>mation: prOpel -ler diameter, hub diameter, rake,number of blades <strong>and</strong> propeller material;the variation with radius ofchord, skewback, <strong>and</strong> pitch; propellersections at several radii sho”-<strong>in</strong>q the variation of thickness alongthe chord. For propellers designed<strong>in</strong> Europe, the “ariation with radiusof the distance from the referencel<strong>in</strong>e to the lead<strong>in</strong>g edge, trail<strong>in</strong>gedge, <strong>and</strong> po<strong>in</strong>t of maximum thicknessis acceptable <strong>in</strong> place of the variationof chord <strong>and</strong> skewback.K-13
2. <strong>Ship</strong> speed <strong>and</strong> correspond<strong>in</strong>g shaftrpm.3. Wake as measured <strong>in</strong> a model test.BasisThe results of a harmonic analysisof the measured wake are required.If the harmonic analysis resultsare not available, the mess.”red <strong>in</strong>flowvelocities specified at severalpo<strong>in</strong>ts along the radius <strong>and</strong> atfrequent PO <strong>in</strong>ts around the circumferenceare acceptable, <strong>and</strong> a harmonicanalysis will be per<strong>for</strong>med.If a measured wake is not avail.able, it can be <strong>in</strong>ferred from theavailable wakes of other ships.<strong>for</strong> CalculationsPropeller <strong>for</strong>ces are determ<strong>in</strong>ed bylift<strong>in</strong>g l<strong>in</strong>e theory. This is much lesscomplex than tbe Davidson Laboratorylift<strong>in</strong>g surface theory, but is consideredadequate <strong>in</strong> view of uncerta<strong>in</strong>ties<strong>in</strong> the wake <strong>and</strong> the wide variation <strong>in</strong>service wake due to ship motions <strong>and</strong>sea action.The ma<strong>in</strong> reason <strong>for</strong> cont<strong>in</strong>u<strong>in</strong>g touse the lift<strong>in</strong>g l<strong>in</strong>e theory calculationis that it is the basis <strong>for</strong> the predictionsOf hull pressure <strong>and</strong> hull <strong>for</strong>ce S(see Appendix 7-1) .This is a proprietary proqram notdeveloped <strong>for</strong> general distribution.APPENDIX 6-3. CALCULATION OF STEADYAND HARNONIC PROPELLER FORCES<strong>Computer</strong> Program used by tbe AmericanBureau of <strong>Ship</strong>p<strong>in</strong>gOutputIn<strong>for</strong>mation1. Mean <strong>and</strong> blade-frequency ccunponentsof the three <strong>for</strong>ces <strong>and</strong>three moments act<strong>in</strong>g on the propeller.2. Time -”ary<strong>in</strong>.g blade pressure distributionat each wake harmonic .InputIn<strong>for</strong>mation1. Propeller blade geometry.2. Fourier coefficients of the spatialvariation of the axial <strong>and</strong>tangential components of wake.Basisof CalculationThe program employs an extendedversion of unsteady lift<strong>in</strong>g l<strong>in</strong>e theoryas developed by Dr. Neal A. BrCIWn atMIT (15). The extension <strong>in</strong>cludes theeffects of propeller skew, which werenot treated <strong>in</strong> the orig<strong>in</strong>al theory.The results of this program are used aspartial <strong>in</strong>put to the ,,s”rface Force,sK-14program described <strong>in</strong> Appendix 7-3.APPENDIX 6-4. HARNONIC FoRcEs AND MO_MENTS GENERATED BY A PROPELLER IN NON-UNIFORM FLOWA <strong>Computer</strong> Program under Development atMassachusetts Institute of Technology byprOfessOr Just<strong>in</strong> E. Ker”<strong>in</strong>, Departmentof ocean Eng<strong>in</strong>eer<strong>in</strong>gThe program represents the propellerblade by grid po<strong>in</strong>ts distributedover tbe surface <strong>and</strong> the wake spatiallydef<strong>in</strong>ed (cyl<strong>in</strong>drical coord<strong>in</strong>ates) <strong>in</strong>three directions : longitud<strong>in</strong>al, tangential,<strong>and</strong> radial. A distribution of ~or.ticity is assumed over the surface, <strong>and</strong>by successive iteration is ref<strong>in</strong>ed to becompatible with the boundary of the propellersurface <strong>and</strong> the laws of hydrodynamics,Kel”<strong>in</strong>, s theorem, <strong>and</strong> the Kuttarequirement <strong>for</strong> flow Cont<strong>in</strong>uity at thetrail<strong>in</strong>g edge.This discrete element approach appearsto offer a number of advantages asa start<strong>in</strong>g po<strong>in</strong>t <strong>for</strong> the computation ofunsteady, partially cavitat<strong>in</strong>g flo”s:(a) It is capable of yield<strong>in</strong>g accuratepredictions of mean load<strong>in</strong>g, bothat design <strong>and</strong> off-design conditions.(b) Be<strong>in</strong>g a numerical procedure, bladegeometry can be <strong>in</strong>corporated exactlyso that propellers with larqeskew, rake, <strong>and</strong> vary<strong>in</strong>g pitch distributioncan be accommodated. Thisis considered essential, s<strong>in</strong>ce itis through the variation of theseparameters that optimum propellerdesigns can be evolved.(c) S<strong>in</strong>ce the procedure <strong>in</strong>cludes allthree components of <strong>in</strong>duced velocity,there is no particular problem<strong>in</strong> <strong>in</strong>clud<strong>in</strong>g tangential <strong>and</strong> radialwake field components.(d) s<strong>in</strong>ce no load<strong>in</strong>g mode functions areemployed, the modifications ultimatelyrequired to <strong>in</strong>clude the cavitieswould appear to be feasible.Source elements presently <strong>in</strong>cludedto represent blade thickness canassume the further role of represent<strong>in</strong>gthe cavity volume.(e) A discrete element method lends itselfnaturally to a step-by-stepdoma<strong>in</strong> solution, which is also essential<strong>for</strong> the subsequent <strong>in</strong>cl”-sion of unsteady cavitation.The procedures are still under development,but have been applied to specific cases with good results. See References(16) <strong>and</strong> (30).I\+-‘!
APPENDIX 6-5. HARMONIC FORCES AND MO-XSNTS GENESATED BY A PROPELLER IN NON-‘~lFORM FLJ3W<strong>Computer</strong> Program Developed <strong>and</strong> <strong>Use</strong>d bythe Admiralty Research Laboratory, Tedd<strong>in</strong>gton, Engl<strong>and</strong>OutputIn<strong>for</strong>mation1. The <strong>in</strong>put data.2. If wakes are given as velocitymeasurements, the harmonic valuesare pr<strong>in</strong>ted (to the 71 harmonic ).If given as Fourier components,these are listed.3. The contribution to thrust, torque,vertical <strong>and</strong> horizontal <strong>for</strong>ces, <strong>and</strong>moments from each specified radialsection.4. The <strong>in</strong>tegrated thr”str torque,horizontal <strong>and</strong> vertical <strong>for</strong>ces,<strong>and</strong> moments fox multiples of bladerate harmonics.Input1.2.3.4.5.6.7.8.BasisIn<strong>for</strong>mationShaftspeed.Propeller geometry, <strong>in</strong>clud<strong>in</strong>g skew,chord length, blade pitch angle atspecific radii.Wake, either <strong>in</strong> Fourier series,amplitude-plus-phase <strong>for</strong>m, or asequally spaced measurements ofwake at the radii where the propellergeometry <strong>in</strong><strong>for</strong>mation isgiven. Only axial or both axial<strong>and</strong> tangential wakes may be speci -fied.Calculations can be r“n <strong>for</strong> S“C_cessive skew values.Input radii may vary from 4 to 14.As many as 20 skew configurationsmay be determ<strong>in</strong>ed.As many as 140 harmonics of theblade frequency <strong>for</strong>ces may be calculated,but generally the numberis limited to 10.As many as 100 wake harmonics <strong>and</strong>200 wake measurements per radiusmay be <strong>in</strong>put.<strong>for</strong> CalculationThe calculation of the fluctuat<strong>in</strong>g<strong>for</strong>ces on a propeller falls <strong>in</strong>to threeparts. The first part is the calculationof the variation of the <strong>in</strong>flow velocityto the blades; the next stage<strong>in</strong>volves the calculation of the fluctuat<strong>in</strong>glift-distribution on a section ofblade associated “ith this fluctuat<strong>in</strong>g<strong>in</strong>flo”; the f<strong>in</strong>al stage is the calcula -tiOn of the propeller <strong>for</strong>ces a“d ~Oment S .The calculation of the fluctuat<strong>in</strong>g liftis based on two-dimensional unsteady airfoiltheory. It ignores blade-to-blade<strong>in</strong>teraction <strong>and</strong> the “ariation with radiusof the “ario”s significant parameters .These approximations “ould be “acceptable<strong>for</strong> predict<strong>in</strong>g the steady lift, butare acceptable <strong>for</strong> the unsteady lift,probably overestimat<strong>in</strong>g the lift. SeeReference (17).APPENDIx 7-1. CALCULAT1 ON OF HARMONICFORCES AND MONENTS ON THE HULL GENERATEDBY PROPELLER ACTIONProgram Ueveloped <strong>and</strong> used by LittletonResearch <strong>and</strong> Eng<strong>in</strong>eer<strong>in</strong>g CorporationOUtputIn<strong>for</strong>mation1. The harmonic hull surface pressureat blade beat frequency generatedby the loaded, noncavitat<strong>in</strong>q prO -peller <strong>in</strong> the region of the propeller(generally at grid po<strong>in</strong>ts correspond<strong>in</strong>gto underwater <strong>in</strong>tersectionsof buttocks <strong>and</strong> frames with<strong>in</strong>4 diameters of the propeller) .2. By <strong>in</strong>tegration of the abo”e, theblade frequency harmonic hull<strong>for</strong>ces <strong>and</strong> moments act<strong>in</strong>g on thehull because of noncavitat<strong>in</strong>g propelleraction.InputIn<strong>for</strong>mation1. The computed propeller 1ift distr i-bution along the propeller blade(see Appendix 6-2) .2. The geometry of the propeller.3. The hull coord<strong>in</strong>ates at the po<strong>in</strong>tsof pressure determ<strong>in</strong>ation.Basis<strong>for</strong> CalculationThe free-field pressures (i.e., thepressures that would exist <strong>in</strong> open waterif the hull “ere not present) are calculatedat each hull grid po<strong>in</strong>t due to (1)the load<strong>in</strong>g on the propeller blades (assumedto be concentrated at the <strong>for</strong>wardquarter po<strong>in</strong>t of the blade chord) , (2)the thickness of the propeller blade.The sum of these two pressures, <strong>in</strong> theirproper phase, is multiplied by 2 to givethe reported pressure cm the hull surface.The pressure from a harmonicallyvary<strong>in</strong>g <strong>for</strong>ce hav<strong>in</strong>g x, y, <strong>and</strong> z components<strong>in</strong>volves the distance from thepo<strong>in</strong>t to the location of the <strong>for</strong>ce.Substitut<strong>in</strong>g steady <strong>and</strong> harmonic <strong>for</strong>ces<strong>and</strong> distances as a function of shaftangle yields values of the pressure.The result <strong>in</strong>g equations <strong>in</strong>vol”e a serieswhich under certa<strong>in</strong> conditions con”ergesslowly . orig<strong>in</strong>ally only a fe” termswere developed. More recently the generalterm has been de”eloped, allow<strong>in</strong>gK-15
sufficient terms to assure convergence.This results <strong>in</strong> pressures that correspondto measured values. The <strong>in</strong>tegration<strong>for</strong> blade thickness is similar.If the cavitation volume on the bladecould be def<strong>in</strong>ed by a Fourier sexies,the same process could be applied.This has not yet been done.This is a proprietary program notdeveloped <strong>for</strong> general distribution.See Reference (13).APPENDIX 7-2. CALCULATION OF STEADYAND HARMONIC PRESSURE FIELDS GENERATEDBY A NONCAVITATING PROPELLERProgram Developed by Davidson Laboratory,Stevens Institute of Technology,Under U.S. Navy ContractsOutputIn<strong>for</strong>mationThis program furnishes the steady<strong>and</strong> harmonic components of the pressurefield qenerated by a none.s.vitat<strong>in</strong>ashi~propelier operati;g <strong>in</strong> a spatiall~ var~iable <strong>in</strong>flow.InputIn<strong>for</strong>mation1. The propeller blade geometry.2. The Fourier components of the spatialvariation of the axial <strong>and</strong>tangential components of the wake.3. The spatial location of the po<strong>in</strong>tswhere tbe pressures are desired.2.3.4.5.BasisWakedistribution.Stern l<strong>in</strong>es <strong>and</strong> coord<strong>in</strong>ates describ<strong>in</strong>gthe sectional geometry of approximatelytbe aft one-third ofthe ship.Time-dependent geometry of propellercavitation effects (optional) .Time-vary<strong>in</strong>g blade pressure distributionat each wake harmonic (outputfrom program described <strong>in</strong> Appendix6-3) .of CalculationThis program employs the method presentedby Professor William s. vorvs <strong>in</strong>Reference (19). The conventional procedureof evaluat<strong>in</strong>g the hull <strong>for</strong>ces is to<strong>in</strong>tegrate the propeller-generated pressuresover the hull surface. These pressuresare due to diffraction of tbe propeller-<strong>in</strong>ducedwater flow by the hull.The diffraction problem <strong>and</strong> hence thepressure <strong>in</strong>tegration difficulties areavoided <strong>in</strong> the analysis <strong>and</strong> computer programby utiliz<strong>in</strong>g a special applicationof Green’s Theorem.APPENDIX 14-1. IQNGITUDINAL AND TOR-SIONAL SRAFTING VIBRATIONSProgram <strong>Use</strong>d by Maritime Adm<strong>in</strong>istrationNumber <strong>and</strong>/or Name.,~-g+oz4. The steady <strong>and</strong> time-dependent bladeload<strong>in</strong>g distribution at multiplesof any shaft frequency as producedby the program described <strong>in</strong> Appendix6-1.Basis<strong>for</strong> CalculationThis program is a cont<strong>in</strong>uation ofthe one described <strong>in</strong> Appendix 6-1 <strong>and</strong>requires data generated <strong>in</strong> that program.It is available through Davidson Laboratory<strong>for</strong> $5,000. See Reference (31).APPENDIX 7-3. mCUUTION oF pROPELLER-INDUCED HULL SURFACE FORCESProgram Developed <strong>and</strong> <strong>Use</strong>d by ProfessorWilliam S. Vorus (University of Michigan)<strong>and</strong> tbe American B“rea” of <strong>Ship</strong>p<strong>in</strong>gOutputIn<strong>for</strong>mationThis program computes all componentsof tbe hull <strong>for</strong>ce <strong>and</strong> moment atmultiples of tbe propeller blade rates.(In general, the vertical <strong>for</strong>ce componentis the only one desired. )InputIn<strong>for</strong>mation1. Propeller geometry.K- 16Category (s)..~”~~**Shaft<strong>in</strong>gCalculationsDescriptive Proqram TitleSource**Shaft <strong>Vibration</strong>al <strong>Analysis</strong>**Us<strong>in</strong>g Holzer MethodActivity**Office of <strong>Ship</strong> Construction**Maritime &dm<strong>in</strong>i~tratiQn**Wash<strong>in</strong>gton, D.C.Eng<strong>in</strong>eer (s) Name-Code-PhoneProgrammerProgram**Richard Siebert, 721.21, 254-7048**ff&v~~~Status.*prod UctiOnClassificationName-Code-Phone(Security)**Restricted - NAVSEC Program,.+-
Program<strong>in</strong>g<strong>Computer</strong>specialSpecialLanguage* *~~~~RAw ~“Type <strong>Use</strong>d**~ont=o~,.~o~~**NoneHardware~a~~6600Software/OperatiOnProgram size-Source Deck Cards**~~~Program Size-Object Core Words**c~~oo~o oc~a~ wor~~Average Runn<strong>in</strong>g Time (M<strong>in</strong>)Program**1.57Availability,*septe”ber 1970DocumentationProgramStatus**<strong>in</strong><strong>for</strong>mal - Complete (15 pages)AbstractThis program calculates torsional<strong>and</strong> longitud<strong>in</strong>al critical vibrationfrequencies us<strong>in</strong>g the Holzer Method. Itwas orig<strong>in</strong>ally developed by NAVSEC <strong>for</strong>the IBM-7090 <strong>and</strong> subsequently convertedto the CDC-6600 by the Maritime Adm<strong>in</strong>istration.Double precision requirementswere elim<strong>in</strong>ated. Input requires h<strong>and</strong>calculation of all masses, <strong>in</strong>ertias, <strong>and</strong>stiffness factors <strong>for</strong> each component <strong>in</strong>the turb<strong>in</strong>e-gear-sha ft-propeller system.Damp<strong>in</strong>g faCtors are not <strong>in</strong>cluded <strong>in</strong> thecalculation. Output consists of criticalfrequencies <strong>in</strong> CPS <strong>and</strong> RPM <strong>for</strong> variousnumbers of blades.APPENDIX 14-2. LONGITUDINAL SHAFTINGVIBRATIONSProgram <strong>Use</strong>d by J. J. McMullen Associates,Inc.Number <strong>and</strong>/or Name**~_~-121J*Category(s)Source**Mach<strong>in</strong>ery**Shaft<strong>in</strong>g <strong>and</strong> Bear<strong>in</strong>g calculationsActivity**John J. McMullen Associates, Inc.**one WOrld Trade center-Suite 3047**New York, New York 10048Enq<strong>in</strong>eer (s) Name-Code-PhoneProgram**Eng<strong>in</strong>eer<strong>in</strong>gStatus**prOd*cti~nClassification**unc~a~~ifiedProgranun<strong>in</strong>g Language<strong>Computer</strong>●*~o~TRAwDivision(Security)IvType <strong>Use</strong>d**IBM 3613/40 <strong>and</strong> IBM 1~30DocumentationProgramStatus..ln<strong>for</strong>ma I _ user Is GuideAbstractLumped mass system, us<strong>in</strong>g ,,level,,effect. Text description found <strong>in</strong> NSROCReport 3358, September 1970. Computesfrequencies up to four modes.APPENDIX 14-3. LONGITUDINAL AND TOR-SIONAL SHAFTING VIBSATIONSProgram <strong>Use</strong>d by Newport News <strong>Ship</strong>build<strong>in</strong>g<strong>and</strong> Drydock CompanyNuder <strong>and</strong>/or Name,,F-o-0~6 9.5.0251 FORCE VIBCategory (s)**Mach<strong>in</strong>ery**shaft<strong>in</strong>g <strong>and</strong> Bear<strong>in</strong>g CalculationsDescriptive Program TitleSource**~ng itud<strong>in</strong>al <strong>and</strong> Tor Sional <strong>Vibration</strong><strong>in</strong> Propulsion Shaft<strong>in</strong>g SystemsActivity**Newport NeWS shipbuild<strong>in</strong>g <strong>and</strong>Drydock Company**Technical systems Division**4101 Wash<strong>in</strong>gton Avenue, NewportNews, Virg<strong>in</strong>ia 23607(804) 247-7500Eng<strong>in</strong>eer (s) Name-Code-PhoneProgrammer**A. S . Pototzky**F. E.Name-Code-PhoneSiegelK-17 +-
ProgramStatus**ActiveClassification**Unc~a S=ifiedProgramm<strong>in</strong>g<strong>Computer</strong>ProgramprOdUCt iOn(Security)Language**~~~~~~ ~“Typ e <strong>Use</strong>d●*Honeywell 6080Availability●*Not Available <strong>for</strong> General DistributionDocumentationProgram**IncompleteAbstractStatusFORCE VIB is a computer program tocalculate the steady state longitud<strong>in</strong>alor torsional vibratory response ofbrancbed shaft<strong>in</strong>g systems, such as propulsionsystems. Tbe system may have amaximum of 35 elements consist<strong>in</strong>g ofmasses, dampers, <strong>and</strong> spr<strong>in</strong>gs, all withonly one degree of freedom. The masses<strong>and</strong> spr<strong>in</strong>gs may be lumped or distributed,<strong>and</strong> the dampers nay be viscous cmsolid. The program uses the mechanicalimpedance method to calculate displacements,<strong>for</strong>ces, <strong>and</strong> phase angles, whichmay all be frequently dependent. Theprogram also allow the vary<strong>in</strong>g of valuesto conduct parametric studies.APPENDIX 14-4. LONGITUDINAL VIBP.ATIONOF SHAFTING, 11Program Developed <strong>and</strong> <strong>Use</strong>d by LittletonResearch <strong>and</strong> Eng<strong>in</strong>eer<strong>in</strong>g CorporationOutputIn<strong>for</strong>mation1. A plot of the blade order harmonic<strong>for</strong>ce at the thIust bear<strong>in</strong>g as afunction of rpm.2. A plot of the amplitudes of axialmotion at the propeller <strong>and</strong> at thethrust bear<strong>in</strong>g as a function ofr~.3. Tabular data <strong>for</strong> abo”e.Inputln<strong>for</strong>u@tion1. Shaft<strong>in</strong>g arrangement, diameters,<strong>and</strong> Lengths.2. Propeller mass, diameter, numberof blades, pitch, <strong>and</strong> de”elopedarea ratio (or mean “idth ratio) .3. Harmonic thrust (can be determ<strong>in</strong>ed byprogram described <strong>in</strong> Appendix 6-2) .4. The stiffness of the thrust bear<strong>in</strong>g<strong>and</strong> its foundat ion.5. Reduction gear weight.Basis<strong>for</strong> CalculationThe propeller is represented by itsmass plus entra<strong>in</strong>ed water <strong>and</strong> damp<strong>in</strong>g,estimated by Le”is <strong>and</strong> Auslaender Vs recommendations.The shaft is represented by a distributedmass <strong>and</strong> elasticity <strong>and</strong> is assumedto ha”e a hysteretic damp<strong>in</strong>g (nom<strong>in</strong>ally4%) .The thrust bear<strong>in</strong>g is representedas a concentrated mass elastically connectedto a rigid hull.This is a proprietary program notdeveloped <strong>for</strong> general distr ibntion.APPENDIX 17-1. TRAfisvERsE RE5PONSE OFA BEANProgram <strong>Use</strong>d by Newport News <strong>Ship</strong>build<strong>in</strong>g<strong>and</strong> Drydock CompanyNumber <strong>and</strong>/or Name**A-12-00 9.5.0301 Beam vibrationCategory(s)**Conceptual Design**<strong>Ship</strong> <strong>Vibration</strong>sDescriptive ProgrAm TitleSourceProgram**<strong>Vibration</strong> <strong>Analysis</strong> of BeamsActivity*.Newprt News <strong>Ship</strong>build<strong>in</strong>g <strong>and</strong>Drydock Company*●Production computer systemsDivision**4101 Wash<strong>in</strong>gton Avenue, NewportNews, Virg<strong>in</strong>ia 23607[804) 247-7500Status,*prOductiOnClassification**Unc~a~SifiedusePK091aUUfI<strong>in</strong>9Language**FOXTRANV<strong>Computer</strong> Type <strong>Use</strong>d(Security)**~on~ywell 6080K-18
SpecialProgramProgramHardware*.~oneAvailability**Nok Avai~ab~e fO~ General Di~_tributionAbstractComputes the steady-state transversevibratory response of a beam withany number of <strong>in</strong>termediate flexible supports,with generalized end conditions,section properties, <strong>and</strong> load<strong>in</strong>g.APPENDIX 17-2. TRANSVERSE V1BRATION OFSHAFTING AND PROPELLERProgram Developed <strong>and</strong> <strong>Use</strong>d by LittletonResearch <strong>and</strong> Eng<strong>in</strong>eer<strong>in</strong>g CorporationOutputIn<strong>for</strong>mation1. Plots of bear<strong>in</strong>g <strong>for</strong>ces, <strong>in</strong> twonormal directions, as a functionof frequency.2. Plots of shaft motions, <strong>in</strong> twonormal directions, as a functionof frequency, at the propeller<strong>and</strong> at other critical locations.3. Plots of the shaft deflectioncurves at each natural frequencywith<strong>in</strong> the operat<strong>in</strong>g speed.The propeller is represented byits mass, its entra<strong>in</strong>ed water, its momentof <strong>in</strong>ertia about the rotationalaxis, its moment of <strong>in</strong>ertia about anaxis perpendicular to the rotationalaxis, the moment of <strong>in</strong>ertia of its entra<strong>in</strong>edwater, <strong>and</strong> tbe hydrodynamic damp<strong>in</strong>g<strong>in</strong> its several modes of motion.The shaft is represented as a seriesof uni<strong>for</strong>m beams hav<strong>in</strong>g distributed mass<strong>and</strong> bend<strong>in</strong>g stiffness <strong>and</strong> hystereticdamp<strong>in</strong>g.The bear<strong>in</strong>gs are represented bytheir stiffness <strong>in</strong> translation <strong>in</strong> two directionsmutually perpendicular to theshaft axis <strong>and</strong> by their stiffness <strong>in</strong> rotationabout the same two axes. Thebear<strong>in</strong>gs are assumed to bend with theshaft; however, where there is flexibilitybetween shaft <strong>and</strong> bear<strong>in</strong>g, e .g., rubberstaves, this flexibility, lateral<strong>and</strong> angular, is <strong>in</strong>corporated <strong>in</strong> the strutmatrix. It is generally acceptable toterm<strong>in</strong>ate the shaft at the after <strong>in</strong>boardl<strong>in</strong>eshaft bear<strong>in</strong>g.The program computes the vibration<strong>in</strong> terms of coupled properties <strong>in</strong> thehorizontal <strong>and</strong> vertical directions. It<strong>in</strong>cludes the <strong>in</strong>fluence of the steadythrust (small effect) , but not that ofthe steady torque (very small) .This is a proprietary program notdeveloped <strong>for</strong> general distribution.APPENDIX 20-1. GENERAL BENDING RESPONSEPROGRANProgram Developed <strong>and</strong> <strong>Use</strong>d by Naval shipResearch <strong>and</strong> Development CenteX4. Plots of the steady plus harmonicbend<strong>in</strong>g moments <strong>in</strong> the shaft ofthe aftemnost bear<strong>in</strong>g.e**GBRp5. <strong>Computer</strong> tables <strong>for</strong> above.InputIn<strong>for</strong>mation1. Shaft<strong>in</strong>g arrangement, diameters,<strong>and</strong> lengths.2. Propeller weight <strong>and</strong> moment of <strong>in</strong>ertiaabout its rotation axis, diameter,number of blades, pitch,<strong>and</strong> developed area ratio.3. Stiffness or flexibility matrices<strong>for</strong> each bear<strong>in</strong>g about axes perpendicularto the axis of rotation(<strong>for</strong>ce <strong>and</strong> rotation ).4. Horizontal <strong>and</strong> vertical harmonic<strong>for</strong>ces <strong>and</strong> moments, <strong>and</strong> the steadythrust (can be determ<strong>in</strong>ed by theprogram described <strong>in</strong> Appendix 6-2) .Basis<strong>for</strong> CalculationsCategory (s)**L~t~ra~ , Longitud<strong>in</strong>al, <strong>and</strong> TorsionalBeam ~ibrations**Bend<strong>in</strong>g coupled with TorsionalBeam <strong>Vibration</strong>s**Whirl<strong>in</strong>g <strong>Vibration</strong>s of PrOPellerShaftsDescriptive Program TitleBource**GeneraL Bend<strong>in</strong>g ~~sponse programActivity*.NavaI <strong>Ship</strong> R~~~~r~h ~~d DevelopmentCenter**Bethesda, Maryl<strong>and</strong> 200S4Eng<strong>in</strong>eer (s)Program**f.fi~hae~ E. Golden●*Franci~ M. HendersonStatus* ,Active prOdUct iOnK-19
Classification**unc~a~~ifiedProgramm<strong>in</strong>g<strong>Computer</strong>OutputSpecialProgram(Security)Language*.p~~~~ ~“**CDCTyp e <strong>Use</strong>dPlott<strong>in</strong>g~~~~ SerieS..~~ ~~~~ p~o~~Software/OperatiOn**overlays <strong>for</strong> Program Subrout<strong>in</strong>es.*Open Core tO optimize stora9eAvailability**Availability <strong>for</strong> General Distributionthrough Da”id Taylor Naval<strong>Ship</strong> Research <strong>and</strong> DevelopmentCenterDocumentationProgram**CompleteAbstractThe General Bend<strong>in</strong>g Response Program(GBRP) consists of the union ofthree programs: General Bend<strong>in</strong>g Res~nseCOde 1 (GBRC1) <strong>for</strong> lateral,longitud<strong>in</strong>al, <strong>and</strong> torsional vibrations;GBRC2 <strong>for</strong> vibrations <strong>in</strong>volv<strong>in</strong>g bend<strong>in</strong>gcoupled with torsion; <strong>and</strong> GBRC3 <strong>for</strong>whirl<strong>in</strong>g vibrations of propeller shafts.The latter two codes resulted from anextended application of the mathematicalmodel used <strong>in</strong> the first code. Theprogram <strong>for</strong>mulates the f<strong>in</strong>ite differenceequations which approximate the boundary-valueproblem represent<strong>in</strong>g thesteady-state motion of a vibrat<strong>in</strong>g nonuni<strong>for</strong>mmass-spr<strong>in</strong>g system such as aship hull or shaft<strong>in</strong>g <strong>in</strong> bend<strong>in</strong>g. Theprogram calculates natural frequencies<strong>and</strong> mode shapes <strong>and</strong> the response tospecified harmonic driv<strong>in</strong>g <strong>for</strong>ces <strong>and</strong>moments. The program can represent aship hull connected elastically to othersystems such as the propulsion system<strong>and</strong> to sprung masses. Longitud<strong>in</strong>al ortorsional vibration problems can alsobe solved by divid<strong>in</strong>g each beam <strong>in</strong>tosections connected by spr<strong>in</strong>gs, thus reduc<strong>in</strong>gthe model to a mass-spr<strong>in</strong>g system.See Reference (27) .APPENDIX 20-2. SHIP HULL VIBRATORYRESPONSEProgram <strong>Use</strong>d by USS Eng<strong>in</strong>eers <strong>and</strong> consultants,Inc.Number <strong>and</strong>/or Name**A-~2-~~~Category (s)s~~”~**Conceptual Design**<strong>Ship</strong> <strong>Vibration</strong>sDescriptive Program TitleSource**Si<strong>in</strong>”lated <strong>Ship</strong>-<strong>Hull</strong>Activityvibrationn.USS Eng<strong>in</strong>eers <strong>and</strong> consultants,lnc .**fjo~Gr~~t st~e~t**Pittsburgh, Pennsylvania 15230Eng<strong>in</strong>eer (s) Name-Code-PhoneProgramClassification**F. Ronald Griffith(412) 433-6517Status**prOd~ction**rJnC~aSSifiedProgram<strong>in</strong>g**FoR~~~(Security)LanguageIv<strong>Computer</strong> Type usedSpecialSpecial**I-DC 6500**N~ne**NoneHardwareSoftware/OperationProgram Size-Source Deck cards**4,000 cardsProyran Size-Object Core Words*,I~oK oct=l WOrdSAverage Runn<strong>in</strong>g Time (M<strong>in</strong>)Programcost —**3 Mi*”te~Availability**Time Shar<strong>in</strong>g ServiceCall F. R. Griffith**NegotiableK-2o
———Documentation Status**In<strong>for</strong>mal completeProgramAbstractThe purpose of SHRVS is the accurateprediction of the vibratory I-esponseof a ship hull to either steady-State or transient loads applied <strong>in</strong> thevertical centerl<strong>in</strong>e plane of the hull.Factors considered <strong>in</strong>clude cargo distribution,bulkhead location, mach<strong>in</strong>eryspace location, as well as the flexural<strong>and</strong> shear stiffness of the ma<strong>in</strong>-hullgirder <strong>and</strong> of the double-bottom structure.See Reference (32).K-21
K-22I