Fault-Tolerant Control of a Blade-pitch Wind Turbine With Inverter ...
Fault-Tolerant Control of a Blade-pitch Wind Turbine With Inverter ...
Fault-Tolerant Control of a Blade-pitch Wind Turbine With Inverter ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Fault</strong>-<strong>Tolerant</strong> <strong>Control</strong> <strong>of</strong> a <strong>Blade</strong>-<strong>pitch</strong> <strong>Wind</strong><strong>Turbine</strong> <strong>With</strong> <strong>Inverter</strong>-fed GeneratorV. Lešić, M. Vašak, N. PerićFaculty <strong>of</strong> Electrical Engineeringand ComputingUniversity <strong>of</strong> ZagrebZagreb, Croatiae-mail: vinko.lesic@fer.hrT. WolbankFaculty <strong>of</strong> Electrical Engineeringand Information TechnologyVienna University <strong>of</strong> TechnologyVienna, AustriaG. JoksimovićFaculty <strong>of</strong> Electrical EngineeringUniversity <strong>of</strong> MontenegroPodgorica, MontenegroAbstract—A fact is that wind energy is both green andexpensive energy. In order to increase its economic competence,wind turbine faults should be reduced and prevented. In windturbines faults most commonly occur in the gearbox and in thegenerator system components like power converter or generatorelectromechanical parts. This paper proposes a fault-tolerantcontrol strategy for variable-speed variable-<strong>pitch</strong> wind turbinesin case <strong>of</strong> identified and characterized generator electromechanicalfaults like broken rotor bar or winding inter-turn fault. Inparticular we propose an upgrade <strong>of</strong> the torque control loop withflux-angle-based torque modulation. Usage <strong>of</strong> <strong>pitch</strong> controllerin the low wind speed region is also proposed to intentionallyreduce power capture in order to avoid or to postpone the systemfault development. Presented fault-tolerant control techniques aredeveloped considering their easy implementation and installationin available control systems <strong>of</strong> existing wind turbines to extendtheir life cycle and energy production. Simulation results for thecase <strong>of</strong> 700 kW direct-drive wind turbine and the identified statorwinding fault are presented.I. INTRODUCTIONDue to global warming and climate changes, renewableenergy sources and green energy have considerable impacton today’s economy. <strong>Wind</strong> energy is the fastest-growingrenewable energy source. Compared however with fossil fuelbased power systems, wind energy is considered to be a lowpower quality unreliable source with low conversion efficiency,which results in an expensive energy system. Therefore, themain goal is to develop effective and efficient renewableenergy systems and to achieve minimization <strong>of</strong> the cost andmaintenance <strong>of</strong> the corresponding installation at the same time.To keep the efficiency <strong>of</strong> energy conversion processes inwind turbines at or near their optimum values all systemcomponents have to be continuously monitored. If there issome kind <strong>of</strong> fault detected in the system, wind turbinestoday have a safety protocol which rotates its blades at 90 ◦<strong>pitch</strong> angle and halts the turbine rotation by reducing theaerodynamic torque to zero and behaving as an aerodynamicbreak. Energy production therefore also drops to zero.Many <strong>of</strong> these faults can be detected through a monitoringsystem long before they become fully developed and triggerthe shut-down protocol. Once noticed, the development <strong>of</strong> thefault should be slowed down by a fault-tolerant control systemthat extends the life and operation time <strong>of</strong> expensive turbinecomponents and sustains the energy production.Focus <strong>of</strong> this paper is, therefore, to research and developa fault-tolerant extension <strong>of</strong> the wind turbine control systemfor the case <strong>of</strong> generator electromechanical faults, which arebesides gearbox and power converters faults the most commonin wind turbine systems [1]. In case <strong>of</strong> identified faults, itadapts control actions through a fast control loop for fluxangle-basedmodulation <strong>of</strong> the generator torque, and througha slow control loop that ensures the generator placement at apoint <strong>of</strong> its speed-torque plane where it is possible to:• enable the fast loop to perform correctly,• protect the generator and other wind turbine componentsby stopping the fault further development,• keep the electrical energy production optimal under emergencycircumstances.This paper is organized as follows. <strong>Wind</strong> turbine electricalsubsystem with different generator types is described in SectionII. Some <strong>of</strong> the basic control strategies for a variable-speedvariable-<strong>pitch</strong> wind turbine are presented in Section III alongwith its normal operating maps. In Section IV, a fault-tolerantapproach and control algorithm is proposed and described toenable wind turbine operation in emergency state. Section Vprovides MATLAB/Simulink simulation results obtained withthe proposed fault-tolerant control startegy.II. ELECTRICAL SUBSYSTEM<strong>Wind</strong> turbine in principle consists <strong>of</strong> a three-blade aerodynamicsystem mounted on a hub, <strong>of</strong> a nacelle and <strong>of</strong> a tower.Inside the nacelle there is a drivetrain with optional gearboxand electrical subsystem with a generator and an electronicconverter. There are several types <strong>of</strong> generators used in windturbines: doubly-fed induction generator (DFIG) with a woundrotor connected to the grid through slip rings and electronicconverter (EC), squirrel-cage induction generator (SCIG) withan EC connected to the stator (Fig. 1) and a direct-drivesynchronous generator (SG) coupled to the grid through an ECand with rotor slip-rings for the excitation voltage. A lot <strong>of</strong>effort is currently put into developing large-scale synchronousgenerators with permanent magnets.978-1-4244-9311-1/11/$26.00 ©2011 IEEE 2097
C Pmax30SCIG1 : n s DCACACDCFig. 1. Stator-controlled squirrel cage induction generator.
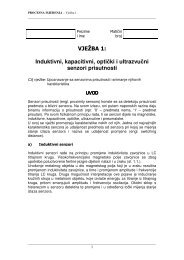
Generator torque (Nm)T g*T gfΔθθ * θ 1 θ 2Flux linkage angle (rad)Fig. 7. Torque modulation due to a fault condition when T g nonf cannotbe restored.damaged part. In case <strong>of</strong> e.g. induction generators, this methodis applied using a field-oriented control (FOC) technique.Torque modulation is shown in Fig. 6. When the flux inangle θ approaches the angle span ∆θ, the torque is reduced tothe maximum allowed value T gf defined with a fault conditionand, possibly, current generator speed. After the flux passes it,torque is restored to the right selected value T g nonf . The value<strong>of</strong> T g nonf is determined such that the average machine torqueis maintained on the optimal level, taking into account themachine constraints. Procedure is then periodically executed,with electrical angle period equal π, since the flux influencesthe faulty part with its north and south pole in each turn. Due tothe finite bandwidth <strong>of</strong> the torque control loop, it is necessaryto start reducing the torque prior to reaching the flux angleθ 1 , while the torque is restored to the value T g nonf at theelectrical angle θ on after passing θ 2 .Torque transitions between steady-state operating areas aresimplified and presented as linear characteristics that correspondto maximum available torque decrease/increase ratedetermined by maximum possible currents decrease/increaserates, i.e. by the power converter DC link constraints. Consideringmore realistic torque changes which would be amix <strong>of</strong> linear and exponential functions can be also handledbut is in the following presentation omitted to facilitate themathematical treatment <strong>of</strong> the proposed method. Fig. 6 alsoshows that reducing the torque takes less time than restoring it.This is due to the back-electromotive force which opposes thecurrent and thereby aggravates torque restoration. Availabletorque rates for generator torque decrease and increase aredenoted with T ˙ g− (ω g ) and T ˙ g+ (ω g ), respectively.In the following we derive the fault-tolerant control strategyfor the synchronous machine stator fault due to stator windinginter-turn fault, but similar strategy can be also derived for afaulty asynchronous machine, either for the rotor bar defector for the inter-turn winding fault on the stator. For easiermathematical treatment we assume constant value <strong>of</strong> T gf , althoughfor this type <strong>of</strong> fault there exists an inverse-proportionalrelation between T gf and electrical speed. Since the generatorelectrical speed in case <strong>of</strong> synchronous machine is defined asω e = pω g = ∆θ∆tand duration <strong>of</strong> the torque decrease transient asπ(5)∆t <strong>of</strong>f = T g nonf − T gf, (6)T˙g− (ω g )by combining these two relations the following is obtained:θ 1 − θ <strong>of</strong>fpω gFinally, θ <strong>of</strong>f can be derived from (7):= T g nonf − T gf. (7)T˙g− (ω g )T g nonf − T gfθ <strong>of</strong>f = θ 1 − pω g . (8)T˙g− (ω g )In the same way, θ on is obtained asT g nonf − T gfθ on = θ 2 + pω g . (9)T˙g+ (ω g )If the torque value T g nonf can be restored at some angle,thenθ on − θ <strong>of</strong>f π. (10)Putting (8) and (9) into (10), the following is obtained forcondition (10):[]1pω g (T g nonf −T gf )T˙g+ (ω g ) + 1 π−∆θ. (11)T˙g− (ω g )Because <strong>of</strong> large inertia <strong>of</strong> the whole drivetrain, generatorand blade system, these torque oscillations are barely noticeableon the speed transient, such that the speed is affected bythe mean torque value:T av = 1 ππ∫0T g dθ. (12)Mean value <strong>of</strong> the generator torque from Fig. 6 is then givenbyπ − (θ on − θ <strong>of</strong>f )T av = T g nonf + T gf + T g nonf·π2− θ <strong>of</strong>f θ 2 − θ 1·θ1+ T gf + T gf + T g nonf θ on − θ 2. (13)ππ2 πEquation (10) (or (11)) is not satisfied if the speed ω g islarge enough (or if there is a large rotor path under faultinfluence). In that case the torque modulation is given withFig. 7 and peak torque Tg ∗ is attained at angle θ ∗ :Tg ∗ − T gfθ 2 − π + pω gT˙g+ (ω g ) = θ Tg ∗ − T gf1 − pω gT˙g− (ω g ) . (14)Values T ∗ gand θ ∗ can be expressed as:Tg ∗ = T gf + (pω gπ − ∆θ1T˙+ 1g+(ω g) T˙g−(ω g)θ ∗ = θ 1 −π − ∆θ1 + ˙T g−(ω g)T˙g+(ω g)), (15). (16)Mean value <strong>of</strong> the generator torque from Fig. 7 (i.e. in casewhen (10) is not satisfied) is now given byT av = T gfθ 2 − θ 1π+ T gf + T ∗ g2+ T gf + T ∗ g2θ ∗ + π − θ 2+πθ 1 − θ ∗. (17)π2100
Concludingly, if (11) is fulfilled, the resulting average torqueis given with (13); if not, then the resulting average torqueis given with (17). On the boundary, i.e. for equality in(10) or (11), both (13) and (17) give the same torque T av ,such that T av (ω g ) is continuous. The maximum availabletorque T g nonf is the nominal generator torque T gn . ReplacingT g nonf in (13) with the nominal generator torque T gn givesthe maximum available average torque under fault characterizedwith ∆θ and T gf . Replacing T g nonf with T gn in (11)will result in speed ωg ∗ up to which it is possible to restore thenominal torque in the generator in case <strong>of</strong> the considered fault.Above ωg, ∗ (17) holds for the average torque. Fig. 8 showsan exemplary graph <strong>of</strong> available speed-torque points undermachine fault, where the upper limit is based on relations (11),(13) and (17) with T g nonf = T gn . Dashed area denotes allavailable average generator torque values that can be achievedfor certain generator speed.From Fig. 8 it follows that up to the speed ω g1 it is possibleto control the wind turbine in the faulty case without sacrificingpower production. However, from that speed onwardsit will be necessary to use blades <strong>pitch</strong>ing in order to limitthe aerodynamic torque (e.g., C P B and C QB in Fig. 3) and tokeep the power production below optimal in order to suppressthe fault from spreading. The speed control loop is modifiedsuch that instead <strong>of</strong> reference ω n the reference ω 1 (in case<strong>of</strong> gearbox, ω 1 = ω g1 /n s ) is selected. This activates <strong>pitch</strong>control once the right edge <strong>of</strong> the feasible-under-fault optimaltorque characteristics is reached. The optimal power point onT av (ω g ), which is always on the upper edge <strong>of</strong> the dashed area,may deviate from this point and thus further improvementsin power production outside the point (ω g1 , T av (ω g1 )) maybe obtained by using maximum power tracking control alongthe curve <strong>of</strong> maximum T av in the speed span [ω g1 , ω gn ]. Theinterventions in classical wind turbine control that ensure faulttolerantcontrol are given in Fig. 9. Algorithms <strong>of</strong> the slow andthe fast fault-tolerant control loops are given in the sequel.1) <strong>Fault</strong>-tolerant control algorithm, slow loop:I. Compute T g nonf from (8), (9) and (13) such thatT av (ω g ) = T ′ gref ; if T g nonf > T gn , set T g nonf = T gn ;Generator torque (kNm)25020015010050T gnHealthy machineT gfT avT goptω g1<strong>Fault</strong>y machineω gn00 ω*10 20 30gSpeed (rpm)Fig. 8. Available torque-speed generator operating points under fault condition(shaded area). Full line is the achievable part <strong>of</strong> the wind turbine torquespeedcurve under faulty condition. Dash-dot line is the healthy machine curve.ωTORQUEcontrollerω refT gref 'ω gT grefFAULT-TOLERANTcontrol θSPEEDcontrollerβ refGENERATOR& INVERTERPITCH servo& controllerT gWIND+ -ωT g_nonfT gref'SLOW θ FASTT grefstartω g loop θ end loopT gf θ 1 ,θ 2θT gf<strong>Fault</strong> detection andcharacterizationω refa)b)βWINDTURBINEFig. 9. a) <strong>Control</strong> system <strong>of</strong> wind turbine with fault-tolerant control strategy.b) Enlarged fault-tolerant control block.II. If (11) is fulfilled set θ start = θ <strong>of</strong>f mod π else computeθ ∗ from (16) and set θ start = θ ∗ mod π and T g nonf =T gn ; set θ end = θ 2 ;III. Compute ω g1 as a speed coordinate <strong>of</strong> the intersectionpoint <strong>of</strong> T av (ω g ) and <strong>of</strong> the normal wind turbine torquecontroller characteristics, compute ω 1 = ω g1 /n s and setω ref = ω 1 .2) <strong>Fault</strong>-tolerant control algorithm, fast loop:I. On the positive edge <strong>of</strong> logical condition θ > θ end setT gref = T g nonf . On the positive edge <strong>of</strong> the logicalcondition θ > θ start set T gref = T gf .V. SIMULATION RESULTSThis section provides simulation results for a 700 kWMATLAB/Simulink variable-speed variable-<strong>pitch</strong> wind turbinemodel. The direct-drive 60-pole synchronous generator torquecontrol system is modelled as a first-order lag system with timeconstant τ gen = 0.02 s. <strong>Turbine</strong> parameters are: C P max =0.4745, R = 25 m, λ opt = 7.4, ω n = 29 rpm and T gn = 230.5kNm. <strong>Fault</strong> is simulated between flux angles θ 1 = π 2 andθ 2 = π 2 + π 5 , with T gf = 0.5 T gn and presented fault-tolerantcontrol algorithm is applied. Results in Fig. 10 show how thewind turbine behaves in healthy and faulty condition for alinear change <strong>of</strong> wind speed through the entire wind turbineoperating area.Fig. 11 shows the fault-tolerant control system reaction tothe fault that is identified in t = 35 s for the case when theaverage generator torque under fault T av (ω g ) can be equal tothe required torque T ′ greffor the incurred speed ω g, i.e. theoptimum speed-torque point is in the dashed area <strong>of</strong> Fig. 8 forthe occurred fault.Fig. 12 shows the fault-tolerant control system reaction tothe fault identified in t = 35 s for the case when the incurredhealthy machine speed-torque operating point falls out <strong>of</strong> theω2101
20<strong>Wind</strong> speed (m/s)250Generator torque (kNm)1020015000 50 100 150 200 250 300 350 400800400healthyTime (s)Power (kW)10020 25 30 35 40 45 50250200Time (s)00 50 100 150 200 250 300 350 40020healthyTime (s)Pitch angle (degrees)3015010034.8 34.85 34.9 34.95 35 35.05 35.1 35.15 35.2Rotor speed (rpm)102800 50 100 150 200 250 300 350 400Time (s)Fig. 10. <strong>Wind</strong> turbine output power and <strong>pitch</strong> angle for healthy and faultyconditions.Generator torque (kNm)125262420 25 30 35 40 45 50Time (s)Fig. 12. Generator torque modulation and wind turbine speed when theoperating point <strong>of</strong> healthy machine is not feasible under fault. <strong>Fault</strong> occurs at35 s.12011522.6222.634.8 34.9 35 35.1 35.2Time (s)Rotor speed (rpm)34.8 34.9 35 35.1 35.2Time (s)Fig. 11. Generator torque modulation and wind turbine speed when theoperating point <strong>of</strong> healthy machine is feasible under fault. <strong>Fault</strong> occurs at35 s.dashed area <strong>of</strong> Fig. 8. In this case blade <strong>pitch</strong>ing is used inthe faulty condition to bring the speed-torque operating pointinto (ω g1 , T av (ω g1 )).VI. CONCLUSIONSIn this paper we propose a fault-tolerant control schemefor blade-<strong>pitch</strong> wind turbines with an inverter-fed generator.We focus on generator faults that can be well characterizedwith machine flux path areas where the generator torqueshould be limited to prevent fault propagation and with themaximum safety torque value in that path areas. We propose asimple extension <strong>of</strong> the classical two-loop control structure <strong>of</strong>blade-<strong>pitch</strong> wind turbines which ensures that the fault is fullyrespected in operation and that power delivery under fault isdeteriorated as less as possible compared to healthy machineconditions.ACKNOWLEDGEMENTThis work has been supported by the European Commissionand the Republic <strong>of</strong> Croatia under grant FP7-SEE-ERA.netPLUS ERA 80/01.REFERENCES[1] Z. Daneshi-Far, G. A. Capolino, H. Henao, ”Review <strong>of</strong> Failures andCondition Monitoring in <strong>Wind</strong> <strong>Turbine</strong> Generators”, XIX InternationalConference on Electrical Machines - ICEM 2010, September 2010.[2] M. Jelavić, N. Perić, I. Petrović, M. Kajari and S. Car, ”<strong>Wind</strong> turbine controlsystem”, Proc. <strong>of</strong> the 7th Symposium on Power System Management,HO CIGRE, November 2006, pp. 196-201.[3] F. D. Bianchi, H. De Battista and R. J. Mantz, <strong>Wind</strong> <strong>Turbine</strong> <strong>Control</strong>Systems - Principles, Modelling and Gain Scheduling Design., London,England: Springer, ISBN 1-84628-492-9, 2007.[4] T. Burton, D. Sharpe, N. Jenkins and E. Bossanyi <strong>Wind</strong> Energy Handbook,England: John Wiley & Sons, ISBN 0-471-48997-2, 2001.[5] K. E. Johnson, L. Y. Pao, M. J. Balas and L. J. Fingersh: <strong>Control</strong> <strong>of</strong>Variable-Speed <strong>Wind</strong> <strong>Turbine</strong>s, IEEE <strong>Control</strong> Systems Magazine, 1066-033x, June 2006, pp. 70-81.[6] M. Jelavić, N. Perić, and I. Petrović, ”Identification <strong>of</strong> <strong>Wind</strong> <strong>Turbine</strong>Model for <strong>Control</strong>ler Design”, in Proc. <strong>of</strong> the 12th International PowerElectronics and Motion <strong>Control</strong> Conf. EPE - PEMC 2006, Aug. 30 -Sep.1, 2006, pp. 1608-1613.,[7] G. Stojičić, P. Nussbaumer, G. Joksimović, M. Vašak, N. Perić andT. M. Wolbank, ”Precise Separation <strong>of</strong> Inherent Induction MachineAsymmetries from Rotor Bar <strong>Fault</strong> Indicator”, 8th IEEE InternationalSymposium on Diagnostics for Electrical Machines, Power Electronics &Drives, SDEMPED, 2011.[8] M. P. Kazmierkowski, F. Blaabjerg and R. Krishnan, <strong>Control</strong> in PowerElectronics - Selected Problems, San Diego, California: Academic Press,An imprint <strong>of</strong> Elsevier Science, ISBN 0-12-402772-5, 2002.[9] M. Jelavić, N. Perić, I. Petrović, S. Car and M. Madjerčić, ”Design <strong>of</strong> a<strong>Wind</strong> <strong>Turbine</strong> Pitch <strong>Control</strong>ler for Loads and Fatigue Reduction”, Proc.<strong>of</strong> the European <strong>Wind</strong> Energy Conference & Exhibition - EWEC 2007,May 2007.[10] F. Blaabjerg, F. Iov, R. Teodorescu and Z. Chen. ”Power Electronicsin Renewable Energy Systems” Proc. <strong>of</strong> the 12th International PowerElectronics and Motion <strong>Control</strong> Conf. (EPE-PEMC 2006), 2006.[11] J. Lewis and C. Muller, ”A Direct Drive <strong>Wind</strong> <strong>Turbine</strong> HTS Generator”IEEE Power Engineering Society General Meeting, 2007.[12] P. Novak, T. Ekelund, I. Jovik and B. Schmidtbauer, ”Modeling andcontrol <strong>of</strong> variable-speed wind-turbine drive-system dynamics” IEEE<strong>Control</strong> system magazine, 15(4):28-38, August 1995.[13] P. Schaak and T. G. van Engelen, ”Torque control for variable speedwind turbines,” Proc. <strong>of</strong> the European <strong>Wind</strong> Energy Conf. - EWEC 2004,UK, 2004.2102