Class Notes on Rotational Motion - Galileo and Einstein
Class Notes on Rotational Motion - Galileo and Einstein
Class Notes on Rotational Motion - Galileo and Einstein

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
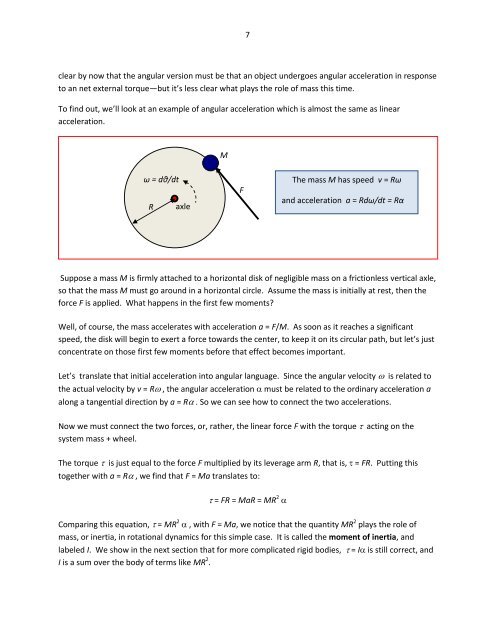
7clear by now that the angular versi<strong>on</strong> must be that an object undergoes angular accelerati<strong>on</strong> in resp<strong>on</strong>seto an net external torque—but it’s less clear what plays the role of mass this time.To find out, we’ll look at an example of angular accelerati<strong>on</strong> which is almost the same as linearaccelerati<strong>on</strong>.Mω = dθ/dtRaxleFThe mass M has speed v = Rω<strong>and</strong> accelerati<strong>on</strong> a = Rdω/dt = RαSuppose a mass M is firmly attached to a horiz<strong>on</strong>tal disk of negligible mass <strong>on</strong> a fricti<strong>on</strong>less vertical axle,so that the mass M must go around in a horiz<strong>on</strong>tal circle. Assume the mass is initially at rest, then theforce F is applied. What happens in the first few moments?Well, of course, the mass accelerates with accelerati<strong>on</strong> a = F/M. As so<strong>on</strong> as it reaches a significantspeed, the disk will begin to exert a force towards the center, to keep it <strong>on</strong> its circular path, but let’s justc<strong>on</strong>centrate <strong>on</strong> those first few moments before that effect becomes important.Let’s translate that initial accelerati<strong>on</strong> into angular language. Since the angular velocity is related tothe actual velocity by v = R , the angular accelerati<strong>on</strong> must be related to the ordinary accelerati<strong>on</strong> aal<strong>on</strong>g a tangential directi<strong>on</strong> by a = R . So we can see how to c<strong>on</strong>nect the two accelerati<strong>on</strong>s.Now we must c<strong>on</strong>nect the two forces, or, rather, the linear force F with the torque acting <strong>on</strong> thesystem mass + wheel.The torque is just equal to the force F multiplied by its leverage arm R, that is, = FR. Putting thistogether with a = R , we find that F = Ma translates to: = FR = MaR = MR 2 Comparing this equati<strong>on</strong>, = MR 2 , with F = Ma, we notice that the quantity MR 2 plays the role ofmass, or inertia, in rotati<strong>on</strong>al dynamics for this simple case. It is called the moment of inertia, <strong>and</strong>labeled I. We show in the next secti<strong>on</strong> that for more complicated rigid bodies, = I is still correct, <strong>and</strong>I is a sum over the body of terms like MR 2 .