Class Notes on Rotational Motion - Galileo and Einstein
Class Notes on Rotational Motion - Galileo and Einstein
Class Notes on Rotational Motion - Galileo and Einstein

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
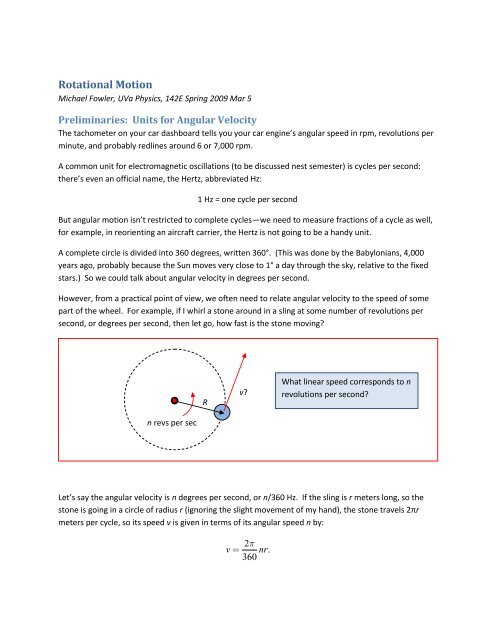
Rotati<strong>on</strong>al Moti<strong>on</strong>Michael Fowler, UVa Physics, 142E Spring 2009 Mar 5Preliminaries: Units for Angular VelocityThe tachometer <strong>on</strong> your car dashboard tells you your car engine’s angular speed in rpm, revoluti<strong>on</strong>s perminute, <strong>and</strong> probably redlines around 6 or 7,000 rpm.A comm<strong>on</strong> unit for electromagnetic oscillati<strong>on</strong>s (to be discussed nest semester) is cycles per sec<strong>on</strong>d:there’s even an official name, the Hertz, abbreviated Hz:1 Hz = <strong>on</strong>e cycle per sec<strong>on</strong>dBut angular moti<strong>on</strong> isn’t restricted to complete cycles—we need to measure fracti<strong>on</strong>s of a cycle as well,for example, in reorienting an aircraft carrier, the Hertz is not going to be a h<strong>and</strong>y unit.A complete circle is divided into 360 degrees, written 360°. (This was d<strong>on</strong>e by the Babyl<strong>on</strong>ians, 4,000years ago, probably because the Sun moves very close to 1° a day through the sky, relative to the fixedstars.) So we could talk about angular velocity in degrees per sec<strong>on</strong>d.However, from a practical point of view, we often need to relate angular velocity to the speed of somepart of the wheel. For example, if I whirl a st<strong>on</strong>e around in a sling at some number of revoluti<strong>on</strong>s persec<strong>on</strong>d, or degrees per sec<strong>on</strong>d, then let go, how fast is the st<strong>on</strong>e moving?Rv?What linear speed corresp<strong>on</strong>ds to nrevoluti<strong>on</strong>s per sec<strong>on</strong>d?n revs per secLet’s say the angular velocity is n degrees per sec<strong>on</strong>d, or n/360 Hz. If the sling is r meters l<strong>on</strong>g, so thest<strong>on</strong>e is going in a circle of radius r (ignoring the slight movement of my h<strong>and</strong>), the st<strong>on</strong>e travels 2πrmeters per cycle, so its speed v is given in terms of its angular speed n by:2v nr.360
2This rather clumsy formula is a c<strong>on</strong>sequence of following the Babyl<strong>on</strong>ians in defining the unit of angle as1/360 of a full circle. We’d have a much nicer formula if instead we defined our unit of angle as 1/2π ofa full circle!So we define: the radian = 1/2π of a full circle. This works out to be about 57.3°, <strong>and</strong> since thecomplete circumference of a circle is 2πr, the distance around the circle corresp<strong>on</strong>ding to an angle of<strong>on</strong>e radian is <strong>on</strong>e radius. Duh.Angle of <strong>on</strong>e radianthe red solid arc has lengthequal to the radius of the circle.sinθ ≈ θ for θ smallfor r = 1, the arc length is θ,the short black line = sinθ.It’s easy to see that radians are the natural angle unit for trig: look at the sine of a small angle.Our default notati<strong>on</strong> for an angle is θ, measured from the x-axis, with counterclockwise as positive.Angular velocity in radians per sec<strong>on</strong>d will usually be denoted by ω: d/ dt.So if a wheel is rotating at positive angular velocity ω radians per sec<strong>on</strong>d about a fixed axle, a point <strong>on</strong>the wheel at distance r from the axle is moving at speeda formula we’ll be using a lot.vr2 2The st<strong>and</strong>ard notati<strong>on</strong> for angular accelerati<strong>on</strong> is d / dt d / dt .Notice that if we have c<strong>on</strong>stant angular accelerati<strong>on</strong>, formulas for angular velocity <strong>and</strong> angulardisplacement (meaning angle turned through) are just like those for linear moti<strong>on</strong> under c<strong>on</strong>stant force:
3 t0 tt10 0 2 2 ( ).2 20 0Just be sure your system has c<strong>on</strong>stant angular accelerati<strong>on</strong> before using these formulas!2Torque: Seesaw PhysicsTorque is a measure of the effectiveness of a force in getting something rotating: actually we’ve comeacross this already in the discussi<strong>on</strong> of the seesaw. If a child sits at the end of a level empty seesaw, itbegins to rotate. O.K., it doesn’t get far, but there is angular accelerati<strong>on</strong>. And we know the if the childsits close to the pivot point, the seesaw turns more slowly.We’ve also seen that two children, <strong>on</strong>e twice as heavy sitting at half the distance, balance—we said theyhad the same leverage. This “leverage” is actually what’s called torque. It’s also called the “moment” ofa force about an axis of rotati<strong>on</strong>. It’s the product of the weight of the child <strong>and</strong> the distance from thepivot or axle.So, for a 20 kg child at a distance of 1.5m, the torque about the pivot point is 300 N.m, setting g = 10.d2d2mgmgBalancing a seesawWe can also have two forces <strong>on</strong> the same side of the pivot balancing—if <strong>on</strong>e of them is upwards. If a20kg child is sitting half way to the pivot, with no-<strong>on</strong>e <strong>on</strong> the other side, you could lift the seesaw to ahoriz<strong>on</strong>tal positi<strong>on</strong> by supplying an upward force equivalent to 10 kg weight at the end of the seesaw,the same side as the child.
4d2dT = mg2mgBalancing a seesaw the hard wayOne further point: what if you supplied the upward force by tying a (light) rope to the end of theseesaw, <strong>and</strong> tugging at some angle? In that case, the tensi<strong>on</strong> in the rope, where it pulls <strong>on</strong> the seesaw,is equivalent to a force perpendicular to the seesaw plus a force parallel. The latter comp<strong>on</strong>ent doesnothing (unless the seesaw can move sideways), the upward comp<strong>on</strong>ent is all that counts.2ddT = 2mgangle 30°2mgOnly the upward rope force comp<strong>on</strong>ent countsmg√3mg2mgThere’s another way to look at this which is sometimes useful: instead of resolving the force intocomp<strong>on</strong>ents at its point of applicati<strong>on</strong>, as in the diagram above, we can take the whole force, actingal<strong>on</strong>g the line in space through its point of applicati<strong>on</strong>, but calculate its leverage—the torque—by takingthe lever arm to be the distance from the pivot point to the line of the force:
5Torque = force × distance of line of force from pivot = 4mgdsin30 = 2mgd2dangle 30°T = 2mg2dsin30Either way, the formula for torque strength is:Fr sin where F is the magnitude of the force, r the distance from the pivot of the point of applicati<strong>on</strong>, <strong>and</strong> θthe angle between the vector r from the pivot point to where the force acts <strong>and</strong> the force F .Rotati<strong>on</strong>al Equivalent of Newt<strong>on</strong>’s First LawBy the time <strong>Galileo</strong> noticed that a smooth ball <strong>on</strong> a flat surface with little fricti<strong>on</strong> would keep the samevelocity a l<strong>on</strong>g time, it was already known that a rotating grindst<strong>on</strong>e, with a well-oiled axle, would keepspinning a l<strong>on</strong>g time too—<strong>and</strong> this, taken to the ideal limit, is Newt<strong>on</strong>’s First Law for rotati<strong>on</strong>: in theabsence of torque, a body will spin at c<strong>on</strong>stant angular velocity indefinitely.It’s worth menti<strong>on</strong>ing that a vertical grindst<strong>on</strong>e must have the axle through the center of gravity. If thisis not the case, gravity will exert a torque, <strong>and</strong> although the wheel might keep spinning, it w<strong>on</strong>’t be atc<strong>on</strong>stant angular velocity.In fact, the torque <strong>on</strong> such an off-center wheel is given by MgrCMsin MgxCM, where r CM is thedistance of the center of mass from the axle, <strong>and</strong> θ the angle between r CM<strong>and</strong> the vertical.To prove this, imagine the wheel to be made up of a large number of glued-together small masses m i atpositi<strong>on</strong>s r i.
6Torque around axlefrom small part ofan off-center wheelτ i = m i gx i .axlex im im i gAs discussed in the preceding secti<strong>on</strong>, the torque about the axle of the weight of the small mass m i isequal to m i g multiplied by the perpendicular distance from the axle to the line of acti<strong>on</strong> of the force,that is, m i gx i , taking the axle as the origin of coordinates.Evidently the magnitude of the total gravitati<strong>on</strong>al torque from the imbalancefrom the definiti<strong>on</strong> of the center of mass. im gxiiMgxKinds of EquilibriumIf there is no fricti<strong>on</strong> at the axle, the wheel can <strong>on</strong>ly be at rest if the center of mass lies <strong>on</strong> the verticalline through the axle. If the center of mass is directly above the axle, the wheel might be at rest, but theslightest push will start it turning: this is called “unstable equilibrium”. If the center of mass is below theaxle, a slight push to <strong>on</strong>e side will cause the wheel to swing back then oscillate, a topic we’ll return tolater—this is “stable equilibrium”. If the center of mass is exactly at the axle, the wheel will rotate at asteady rate—this is “neutral equilibrium”. These all have analogies in linear moti<strong>on</strong>: assuming nofricti<strong>on</strong>, unstable equilibrium is a ball perched <strong>on</strong> a mountaintop, stable is a ball sitting at the bottom ofa valley, <strong>and</strong> neutral is a ball <strong>on</strong> a flat plane. In two dimensi<strong>on</strong>s, there are more complicatedpossibilities: a ball in the middle of a saddle might be stable for displacements parallel to the horse, butunstable for displacement the other way. Situati<strong>on</strong>s analogous to this horsy example do in fact occur inphysical systems.Rotati<strong>on</strong>al Equivalent of Newt<strong>on</strong>’s Sec<strong>on</strong>d LawA Simple Example: Introducing the Moment of Inertia Newt<strong>on</strong>’s Sec<strong>on</strong>d Law, in the form F ma , states that an object undergoes linear accelerati<strong>on</strong> inresp<strong>on</strong>se to an net external force, <strong>and</strong> the mass determines the magnitude of this resp<strong>on</strong>se. It’s prettyCM
7clear by now that the angular versi<strong>on</strong> must be that an object undergoes angular accelerati<strong>on</strong> in resp<strong>on</strong>seto an net external torque—but it’s less clear what plays the role of mass this time.To find out, we’ll look at an example of angular accelerati<strong>on</strong> which is almost the same as linearaccelerati<strong>on</strong>.Mω = dθ/dtRaxleFThe mass M has speed v = Rω<strong>and</strong> accelerati<strong>on</strong> a = Rdω/dt = RαSuppose a mass M is firmly attached to a horiz<strong>on</strong>tal disk of negligible mass <strong>on</strong> a fricti<strong>on</strong>less vertical axle,so that the mass M must go around in a horiz<strong>on</strong>tal circle. Assume the mass is initially at rest, then theforce F is applied. What happens in the first few moments?Well, of course, the mass accelerates with accelerati<strong>on</strong> a = F/M. As so<strong>on</strong> as it reaches a significantspeed, the disk will begin to exert a force towards the center, to keep it <strong>on</strong> its circular path, but let’s justc<strong>on</strong>centrate <strong>on</strong> those first few moments before that effect becomes important.Let’s translate that initial accelerati<strong>on</strong> into angular language. Since the angular velocity is related tothe actual velocity by v = R , the angular accelerati<strong>on</strong> must be related to the ordinary accelerati<strong>on</strong> aal<strong>on</strong>g a tangential directi<strong>on</strong> by a = R . So we can see how to c<strong>on</strong>nect the two accelerati<strong>on</strong>s.Now we must c<strong>on</strong>nect the two forces, or, rather, the linear force F with the torque acting <strong>on</strong> thesystem mass + wheel.The torque is just equal to the force F multiplied by its leverage arm R, that is, = FR. Putting thistogether with a = R , we find that F = Ma translates to: = FR = MaR = MR 2 Comparing this equati<strong>on</strong>, = MR 2 , with F = Ma, we notice that the quantity MR 2 plays the role ofmass, or inertia, in rotati<strong>on</strong>al dynamics for this simple case. It is called the moment of inertia, <strong>and</strong>labeled I. We show in the next secti<strong>on</strong> that for more complicated rigid bodies, = I is still correct, <strong>and</strong>I is a sum over the body of terms like MR 2 .
8Moments of Inertia for Extended BodiesWe’ve <strong>on</strong>ly found the “moment of inertia” for a single mass attached to a light disk. What aboutsomething more complicated, for example a heavy disk?The key to finding the moment of inertia for a solid body is to visualize it as a lot of small masses allglued together. Think specifically of a heavy wheel of radius R, rotating about a fixed axle with negligiblefricti<strong>on</strong>. Imagine the wheel to be initially at rest, then a force F is applied to the rim tangentially, so thatthe torque is FR. Of course, the whole wheel begins to rotate, so think what happens to <strong>on</strong>e of the smallmasses m i we are imagining the wheel to be made up of. If it is at a distance r i from the axle, <strong>and</strong> theinitial angular accelerati<strong>on</strong> of the wheel is , this small mass, m i say, must experience an initialaccelerati<strong>on</strong> r i , so there must be a total force <strong>on</strong> it of f i = m i r i , <strong>and</strong> therefore a torque acting <strong>on</strong> it off i r i = m i r i 2 .Rigid wheel made up ofmany little masses m i :when external torqueFR is applied, m i hasinitial linearaccelerati<strong>on</strong> r i α, soexperiences torque:axler im iFτ i = f i r i = m i r i 2 But where, exactly does this torque come from? Ultimately, it must come from the force F beingapplied to a different part of the wheel, but the immediate cause for the small mass m i ’s accelerati<strong>on</strong> isjust the pulls <strong>and</strong> pushes of its neighbors.In other words, if you push <strong>on</strong> <strong>on</strong>e part of the wheel, since it’s a solid body its rigidity transmits theeffect of the force to all the other parts, so the wheel rotates as a whole—provided of course the forceis not str<strong>on</strong>g enough to tear the wheel apart.Since the torque felt by <strong>on</strong>e small part of the wheel τ i = m i r i 2 , the total torque felt by all the parts ofthe wheel is:τ = Στ i = m i r i 2 = dmr 2 with the integral being over all the tiny masses dm making up the wheel.
9Now comes a crucial point. How do we relate this torque to the external force torque FR? What aboutall the internal forces—the fact that each part of the wheel feels forces from neighboring parts? How dowe take account of this very complicated situati<strong>on</strong>?The answer is: we d<strong>on</strong>’t have to! By Newt<strong>on</strong>’s Third Law, all those internal forces are in equal oppositepairs, acti<strong>on</strong>s <strong>and</strong> reacti<strong>on</strong>s between neighboring masses. This means that when we sum over all partsof the wheel, we count all these forces, <strong>and</strong> they all cancel each other in pairs.Therefore the total torque is just that from the external forces.It follows that the analog of Newt<strong>on</strong>’s Sec<strong>on</strong>d Law for rotati<strong>on</strong> about an axle isTorque = Iwhere the moment of inertia I is given by m i r i 2 = dmr 2 . (And remember that as always theaccelerati<strong>on</strong> must be measures in radians/sec 2 .)Moments of Inertia: Hoops, Disks, Cylinders, Rods.Finding the moment of inertia l is now just a matter of doing elementary integrals. For the case of ahoop of mass M, where all the mass can be taken at the same distance R from the axis of rotati<strong>on</strong>, nointegral at all is necessary:For a hoop, I = MR 2 .A disk can be thought of as c<strong>on</strong>structed of successive hoops, like a two-dimensi<strong>on</strong>al <strong>on</strong>i<strong>on</strong>. As apractical matter, the best approach is to use the two-dimensi<strong>on</strong>al density, call it , (units: kg/m 2 ) sothat the total mass of the disk is density x total area, M = R 2 . Then the “hoop” which is that part ofthe disk between r <strong>and</strong> r + Δr from the center has mass m = 2rΔr , <strong>and</strong> that hoop has moment ofinertia mr 2 = (2rΔrr 2 . A disk can be seen asmade of c<strong>on</strong>centrichoops glued together.Raxlerr + Δr
10Then just do an integral to add up the moments of inertia of all the nested hoops from 0 to R to find themoment of inertia of the disk:R3 1 4 1 2disk 22I 2 r dr R MR .0The same expressi<strong>on</strong> works for a cylinder, which for these purposes is just a stack of disks.What about a rod about <strong>on</strong>e end? Assume its (c<strong>on</strong>stant) linear density is λ kg/m., so a length dx hasmass λdx. Then the moment of inertia isL2 3 2I x dx L / 3 ML / 3.0Suppose such a rod is hinged at <strong>on</strong>e end, horiz<strong>on</strong>tal, <strong>and</strong> falls. What is the initial accelerati<strong>on</strong> of its end?2 MgL / 2 I ( ML / 3) 3 gL / 2.So the end accelerates at Lα = 3g/2.If it is at first sight surprising that the end of the rod accelerates downwards faster then g, c<strong>on</strong>sider thefollowing system: a very light rod, hinged at <strong>on</strong>e end, with a large weight attached to its middle.A very light rod hinged to a wall at <strong>on</strong>e end has a mass atits center: how fast will the rod’s free end acceleratedownwards <strong>on</strong> release from a horiz<strong>on</strong>tal positi<strong>on</strong>?
11If let go from a horiz<strong>on</strong>tal positi<strong>on</strong>, the weight will completely dominate the situati<strong>on</strong>, <strong>and</strong> accelerateddownwards very close to g. This means the far end of the light rod is forced downwards at close to 2g.Our example above is not that extreme, but the same idea.The Parallel Axis TheoremIf we know the moment of inertia of an object about a line through the center of mass, the moment ofinertia about any parallel line is easily found.We’ll prove this for a two-dimensi<strong>on</strong>al object (really a thin three-dimensi<strong>on</strong>al object):new axisrih m ir icenter of massThe moment of inertia of the two-dimensi<strong>on</strong>al object about any axisperpendicular to the object is simply related to that about theparallel axis through the center of mass.With the notati<strong>on</strong> in the diagram,ICM2 miri, <strong>and</strong> recall mr i i0.iiNow I m r m ( r h)newaxisiCMCM2 2i i i ii I 2h m r m hIMh2.ii iii2This is the Parallel Axis Theorem:I I Mh2newaxisCM .where h is the perpendicular distance between the new axis <strong>and</strong> the parallel axis through the center ofgravity. It’s easy to extend this proof to a three-dimensi<strong>on</strong>al object: taking the parallel axes to be in thez-directi<strong>on</strong>, replace r iwith (x i , y i ).
12Varying Moment of InertiaNewt<strong>on</strong> did not actually write his Sec<strong>on</strong>d Law as F = ma = mdv/dt, but as F = dp/dt, where p = mv iscalled the momentum, <strong>and</strong> in fact this is the correct descripti<strong>on</strong> of nature in cases where the mass of anobject varies, such as a rocket expelling fuel, or a falling raindrop growing from c<strong>on</strong>densati<strong>on</strong>.Similarly, the rotati<strong>on</strong>al Sec<strong>on</strong>d Law = Icould be written more generally asddtto allow for the possibility of a varying moment of inertia, <strong>and</strong> this is much more comm<strong>on</strong> than a varyingmass. Think of a spinning dancer or skater throwing her arms out <strong>and</strong> bringing them in, or of a divercurling up <strong>and</strong> uncurling his rotating body. The external torques are pretty small under these c<strong>on</strong>diti<strong>on</strong>s,the variati<strong>on</strong> in spin speed is largely due to the changing moment of inertia <strong>and</strong> the c<strong>on</strong>stancy of thetotal angular momentum IThe observed variati<strong>on</strong>s in angular velocity c<strong>on</strong>firm the validity of the moregeneral law.Rotati<strong>on</strong>al Kinetic EnergyA rotating object has kinetic energy even if its center of mass is at rest. Think of it as composed of manysmall masses m i at distances r i from the center of mass.Then if the angular velocity is m i has speed v i = r i , <strong>and</strong> kinetic energy ½ m i r i 2 2 , <strong>and</strong> summing these,If a net torque is acting, this energy will change:ddtI KE of rotati<strong>on</strong> = ½ I 2 .d dt1 22I I Iso the rate of working, the power, of a torque equals the magnitude of the torque multiplied by theangular velocity, just as a force F moving something at speed v is working at a rate Fv.This equati<strong>on</strong> can also be integrated:dd I dt dt ddt1 22 The total change in kinetic energy equals the integral of torque times angular distance, valid even if thetorque is varying.Rolling Down a RampFor example, we’ll take the case of a hoop of radius R rolling down a ramp without slipping. Suppose atsome instant the center of the hoop is moving with speed v. Of course, other points <strong>on</strong> the hoop are
13moving at different speeds. The point at the bottom in c<strong>on</strong>tact with the ramp isn’t moving at all at thatinstant. But in the frame of reference in which the center of mass is momentarily stati<strong>on</strong>ary, that pointis moving backwards at R. This means that the angular speed <strong>and</strong> the linear speed of the center ofmass are related by v = R.2vv = Rωvω0Velocities relative to the ramp for noslip:zero at point of c<strong>on</strong>tact, v atcenter of hoop, 2v at farthest point.Velocities of parts of hoop relative toits center: v = Rω perpendicular tothe radius.What is the total energy of the rolling hoop? Imagine as usual that it is made up of a large number ofsmall masses m i . If the small mass m i has velocity v i , the total energy is ½ mv i 2 . Since its both movingal<strong>on</strong>g <strong>and</strong> rolling, let’s write the velocity of the small mass m i as v v uwhere u iis the velocity of the small mass m i relative to the center of mass.Then the total kinetic energy of all the small massesi 2CM CM1 2 1 1 2 1 22mivi 2mi v ui 2MvCM vCM mui i 2mui i.i i i iThe first term is just the ordinary kinetic energy of linear moti<strong>on</strong>, the last term is the same as the kineticenergy of rotati<strong>on</strong> for the center of mass at rest. The middle term is zero, because the sum is just the d linear momentum in the center of mass frame, which is zero. ( mui i miri0in the framedtin which the center of mass is at rest.)iii
14Therefore, the total energy is just the sum of the translati<strong>on</strong>al kinetic energy <strong>and</strong> the rotati<strong>on</strong>al kineticenergy:E Mv I1 2 1 22 CM 2where I is the moment of inertia about the center of mass.So what does this mean for the hoop? If it’s rolling at speed v, it’s rotating at angular speed v/R ,<strong>and</strong> since its moment of inertia is MR 2 , its total energy is1 2 1 2 1 2 1 2 2 2E 2Mv 2I2Mv 2MR ( v / R) Mv .So it has twice the kinetic energy of a block of the same mass sliding down at the same speed. Putanother way, a block sliding down through a height h will have speed given by v 2 = 2gh, the hoop will<strong>on</strong>ly reach speed v 2 = gh, because it will have lost the same amount of potential energy, so must havethe same total kinetic energy—including the rotati<strong>on</strong>al kinetic energy, which the block didn’t have.The equati<strong>on</strong> F = ma still describes its linear moti<strong>on</strong> down the ramp, <strong>and</strong> after descending a distance xits velocity is given by v 2 = 2ax. Evidently, the rolling hoop has <strong>on</strong>ly half the accelerati<strong>on</strong> of the slidingblock, so must <strong>on</strong>ly be subject to half the force pulling it downhill. The difference is the retarding staticfricti<strong>on</strong>al force at the point of c<strong>on</strong>tact: that must be just half of the gravitati<strong>on</strong>al force comp<strong>on</strong>entpointing down the hill. If there isn’t enough fricti<strong>on</strong>, the hoop will slide without increasing its angularvelocity. (Note: the hoop has <strong>on</strong>ly half the accelerati<strong>on</strong> of the block, but reaches a final velocity greaterthan half that of the block, because it accelerates for a l<strong>on</strong>ger time.)