FACIAL SOFT BIOMETRICS - Library of Ph.D. Theses | EURASIP
FACIAL SOFT BIOMETRICS - Library of Ph.D. Theses | EURASIP FACIAL SOFT BIOMETRICS - Library of Ph.D. Theses | EURASIP
Biométrie faciale douce 8Nous nous attacherons d’abord à calculer et représenter ( ) sous l’hypothèsesimplificatrice d’uniformité statistique des catégories. La forme fermée del’expression de cette probabilité est démontrée (voir [DAS 05]) comme étant( ) {∏ ( )[6]et peut équivalemment être développée comme suit( ) ( ) ( ) ( )( ) . [7]Notons que, sous l’hypothèse d’uniformité, la probabilité ( ) ci-dessusconstitue une limite inférieure de cette même probabilité (ici en absence del’hypothèse d’uniformité). De manière équivalente, nous pouvons déterminer lavaleur maximale de pour une probabilité de collision donnée. Selon l’expressionen forme fermée, ce calcul s’appuie sur l’approximation suivante,( ) ( )( )[8]issue de [AHM 00] et dont la résolution suivant donne :( ) √ ( ) [9]Ce qui correspond à la valeur de pour laquelle le système aura une probabilitéd’interférence . A titre d’exemple, pour = 1152 et p = 0.5 on obtiendrait .En d’autres termes, étant donné un système de biométrie douce doté de 1152catégories, une répartition uniforme des sujets dans ces catégories et la probabilitéde 50% qu’une collision survienne est vérifiée pour tout groupe de 39 sujets.L’expression en forme fermée de ( ) est la suivante :( ) ( ) [10]A titre d’exemple, étant donné et q = 0.5 et toujours sous hypothèsed’uniformité, on a N>700, ce qui, comme on pourrait s’y attendre, est largementsupérieur à sa valeur pessimiste correspondant à ( ).Dans un souci de généralisation, nous nous éloignerons de l’hypothèsed’uniformité afin de considérer un scénario plus réaliste où la distribution descatégories provient d’une base de données de la vie courante. Dans ce cas, la
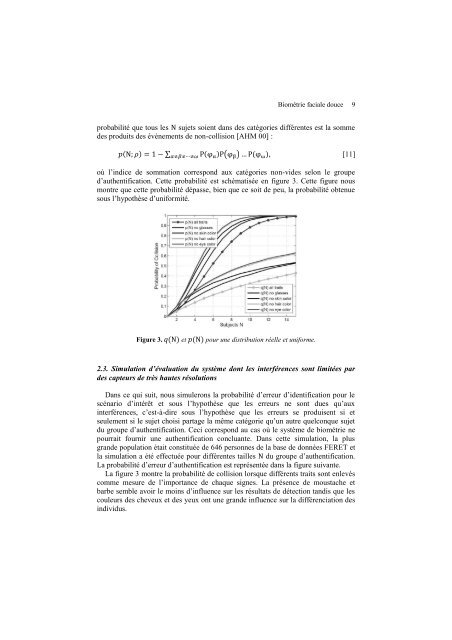
Biométrie faciale douce 9probabilité que tous les sujets soient dans des catégories différentes est la sommedes produits des évènements de non-collision [AHM 00] :( ) ∑ ( ) ( ) ( ), [11]où l’indice de sommation correspond aux catégories non-vides selon le grouped’authentification. Cette probabilité est schématisée en figure 3. Cette figure nousmontre que cette probabilité dépasse, bien que ce soit de peu, la probabilité obtenuesous l’hypothèse d’uniformité.Figure 3. ( ) et ( ) pour une distribution réelle et uniforme.2.3. Simulation d’évaluation du système dont les interférences sont limitées pardes capteurs de très hautes résolutionsDans ce qui suit, nous simulerons la probabilité d’erreur d’identification pour lescénario d’intérêt et sous l’hypothèse que les erreurs ne sont dues qu’auxinterférences, c’est-à-dire sous l’hypothèse que les erreurs se produisent si etseulement si le sujet choisi partage la même catégorie qu’un autre quelconque sujetdu groupe d’authentification. Ceci correspond au cas où le système de biométrie nepourrait fournir une authentification concluante. Dans cette simulation, la plusgrande population était constituée de 646 personnes de la base de données FERET etla simulation a été effectuée pour différentes tailles du groupe d’authentification.La probabilité d’erreur d’authentification est représentée dans la figure suivante.La figure 3 montre la probabilité de collision lorsque différents traits sont enlevéscomme mesure de l’importance de chaque signes. La présence de moustache etbarbe semble avoir le moins d’influence sur les résultats de détection tandis que lescouleurs des cheveux et des yeux ont une grande influence sur la différenciation desindividus.
- Page 87 and 88: 857.2 Eye color as a soft biometric
- Page 89 and 90: 87Table 7.5: GMM eye color results
- Page 91 and 92: 89and office lights, daylight, flas
- Page 93 and 94: 917.5 SummaryThis chapter presented
- Page 95 and 96: 93Chapter 8User acceptance study re
- Page 97 and 98: 95Table 8.1: User experience on acc
- Page 99 and 100: 97scared of their PIN being spying.
- Page 101 and 102: 99Table 8.2: Comparison of existing
- Page 103 and 104: 101ConclusionsThis dissertation exp
- Page 105 and 106: 103Future WorkIt is becoming appare
- Page 107 and 108: 105Appendix AAppendix for Section 3
- Page 109 and 110: 107- We are now left withN −F = 2
- Page 111 and 112: 109Appendix BAppendix to Section 4B
- Page 113 and 114: 111Blue Green Brown BlackBlue 0.75
- Page 115 and 116: 113Appendix CAppendix for Section 6
- Page 117 and 118: 115Appendix DPublicationsThe featur
- Page 119 and 120: 117Bibliography[AAR04] S. Agarwal,
- Page 121 and 122: 119[FCB08] L. Franssen, J. E. Coppe
- Page 123 and 124: 121[Ley96] M. Leyton. The architect
- Page 125 and 126: 123[RN11] D. Reid and M. Nixon. Usi
- Page 127 and 128: 125[ZG09] X. Zhang and Y. Gao. Face
- Page 129: 2Rapporteurs:Prof. Dr. Abdenour HAD
- Page 132 and 133: Biométrie faciale douce 2Les terme
- Page 134 and 135: Biométrie faciale douce 4une perso
- Page 136 and 137: Couleur depeauCouleur descheveuxCou
- Page 140 and 141: Biométrie faciale douce 103. Proba
- Page 142 and 143: Biométrie faciale douce 12l’entr
- Page 144 and 145: Biométrie faciale douce 14Figure 6
- Page 146 and 147: Biométrie faciale douce 16pages 77
- Page 148 and 149: Reviewers:Prof. Dr. Abdenour HADID,
- Page 150 and 151: 3hair, skin and clothes. The propos
- Page 152 and 153: person in the red shirt”. Further
- Page 154 and 155: 7- Not requiring the individual’s
- Page 156 and 157: 9Probability of Collision10.90.80.7
- Page 158 and 159: 11the color FERET dataset [Fer11] w
- Page 160 and 161: 13Table 2: Table of Facial soft bio
- Page 162 and 163: 15Chapter 1PublicationsThe featured
- Page 164 and 165: 17Bibliography[ACPR10] D. Adjeroh,
- Page 166 and 167: 19[ZESH04] R. Zewail, A. Elsafi, M.
Biométrie faciale douce 9probabilité que tous les sujets soient dans des catégories différentes est la sommedes produits des évènements de non-collision [AHM 00] :( ) ∑ ( ) ( ) ( ), [11]où l’indice de sommation correspond aux catégories non-vides selon le grouped’authentification. Cette probabilité est schématisée en figure 3. Cette figure nousmontre que cette probabilité dépasse, bien que ce soit de peu, la probabilité obtenuesous l’hypothèse d’uniformité.Figure 3. ( ) et ( ) pour une distribution réelle et uniforme.2.3. Simulation d’évaluation du système dont les interférences sont limitées pardes capteurs de très hautes résolutionsDans ce qui suit, nous simulerons la probabilité d’erreur d’identification pour lescénario d’intérêt et sous l’hypothèse que les erreurs ne sont dues qu’auxinterférences, c’est-à-dire sous l’hypothèse que les erreurs se produisent si etseulement si le sujet choisi partage la même catégorie qu’un autre quelconque sujetdu groupe d’authentification. Ceci correspond au cas où le système de biométrie nepourrait fournir une authentification concluante. Dans cette simulation, la plusgrande population était constituée de 646 personnes de la base de données FERET etla simulation a été effectuée pour différentes tailles du groupe d’authentification.La probabilité d’erreur d’authentification est représentée dans la figure suivante.La figure 3 montre la probabilité de collision lorsque différents traits sont enlevéscomme mesure de l’importance de chaque signes. La présence de moustache etbarbe semble avoir le moins d’influence sur les résultats de détection tandis que lescouleurs des cheveux et des yeux ont une grande influence sur la différenciation desindividus.


