

Advance Modeling of a Skid-Steering Mobile Robot for Remote ...
Advance Modeling of a Skid-Steering Mobile Robot for Remote ...
Advance Modeling of a Skid-Steering Mobile Robot for Remote ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
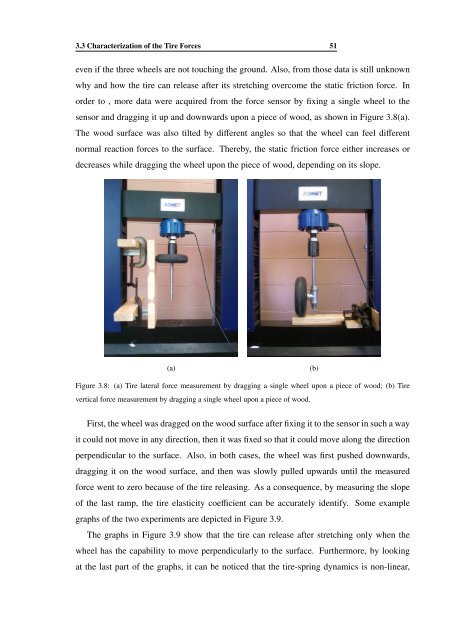
3.3 Characterization <strong>of</strong> the Tire Forces 51even if the three wheels are not touching the ground. Also, from those data is still unknownwhy and how the tire can release after its stretching overcome the static friction <strong>for</strong>ce. Inorder to , more data were acquired from the <strong>for</strong>ce sensor by fixing a single wheel to thesensor and dragging it up and downwards upon a piece <strong>of</strong> wood, as shown in Figure 3.8(a).The wood surface was also tilted by different angles so that the wheel can feel differentnormal reaction <strong>for</strong>ces to the surface. Thereby, the static friction <strong>for</strong>ce either increases ordecreases while dragging the wheel upon the piece <strong>of</strong> wood, depending on its slope.(a)(b)Figure 3.8: (a) Tire lateral <strong>for</strong>ce measurement by dragging a single wheel upon a piece <strong>of</strong> wood; (b) Tirevertical <strong>for</strong>ce measurement by dragging a single wheel upon a piece <strong>of</strong> wood.First, the wheel was dragged on the wood surface after fixing it to the sensor in such a wayit could not move in any direction, then it was fixed so that it could move along the directionperpendicular to the surface. Also, in both cases, the wheel was first pushed downwards,dragging it on the wood surface, and then was slowly pulled upwards until the measured<strong>for</strong>ce went to zero because <strong>of</strong> the tire releasing. As a consequence, by measuring the slope<strong>of</strong> the last ramp, the tire elasticity coefficient can be accurately identify. Some examplegraphs <strong>of</strong> the two experiments are depicted in Figure 3.9.The graphs in Figure 3.9 show that the tire can release after stretching only when thewheel has the capability to move perpendicularly to the surface. Furthermore, by lookingat the last part <strong>of</strong> the graphs, it can be noticed that the tire-spring dynamics is non-linear,













