Dynamical Systems in Neuroscience:
Dynamical Systems in Neuroscience: Dynamical Systems in Neuroscience:
496 Synchronization (see www.izhikevich.com)nI Na +I K -modelV(t)Vquadratic integrate-and-fire modelx(t)=-coth 2 (t-T)resetspikex reset-1 0 +1xresetresetresetFigure 10.38: Top: Periodic spiking of the I Na +I K -neuron near saddle-node homoclinicorbit bifurcation (parameters as in Fig. 4.1a with τ(V ) = 0.167 and I = 4.49). Bottom:Spiking in the corresponding quadratic integrate-and-fire model.and it can be computed explicitly for some simple p(t).The in-phase synchronized solution, χ = 0, is stable whenH ′ (0) = 1 π∫ π0sin 2 t p ′ (t) dt > 0 .Since the function sin 2 t depicted in Fig. 10.37 is small at the ends of the interval andlarge in the middle, the integral is dominated by the sign of p ′ in the middle. Fast risingand slowly decaying excitatory (p > 0) synaptic transmission has p ′ < 0 in the middle,as in the figure, so the integral is negative and the in-phase solution is unstable. Incontrast, fast rising slowly decaying inhibitory (p < 0) synaptic transmission has p ′ > 0in the middle, so the integral is positive and the in-phase solution is stable. Anotherway to see this is to integrate the equation by parts, reduce it to − ∫ p(t) sin 2t dt,and notice that p(t) is concentrated in the first (left) half of the period where sin 2tis positive. Hence, positive (excitatory) p results in H ′ (0) < 0, and vice versa. Bothapproaches confirm the theoretical results independently obtained by van Vreeswijk etal. (1994) and Hansel et al. (1995) that inhibition, not excitation synchronizes Class1 (SNIC) oscillators. The relationship is inverted for the anti-phase solution χ = π/2(prove it), and no relationships is known for other types of oscillators.10.4.3 Homoclinic oscillatorsBesides the SNIC bifurcation considered above, low frequency oscillations may also beindicative of the proximity of the system to a saddle homoclinic orbit bifurcation, as in
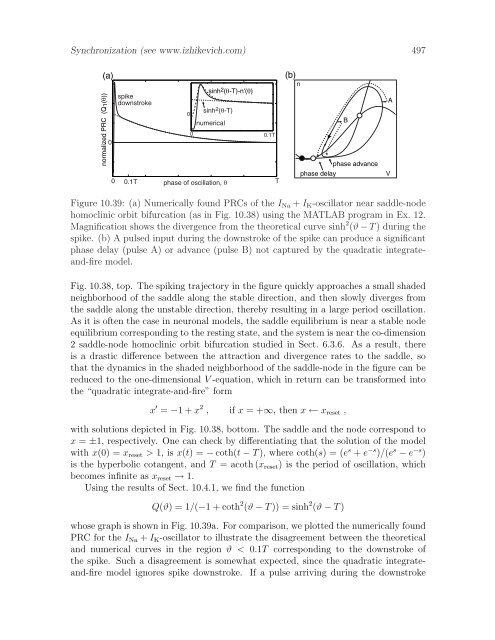
Synchronization (see www.izhikevich.com) 497(a)normalized PRC (Q1( ))0spikedownstroke00sinh 2 ( -T)-n'( )sinh 2 ( -T)numerical0.1T0 0.1T phase of oscillation,T(b)nBphase advancephase delayAVFigure 10.39: (a) Numerically found PRCs of the I Na + I K -oscillator near saddle-nodehomoclinic orbit bifurcation (as in Fig. 10.38) using the MATLAB program in Ex. 12.Magnification shows the divergence from the theoretical curve sinh 2 (ϑ − T ) during thespike. (b) A pulsed input during the downstroke of the spike can produce a significantphase delay (pulse A) or advance (pulse B) not captured by the quadratic integrateand-firemodel.Fig. 10.38, top. The spiking trajectory in the figure quickly approaches a small shadedneighborhood of the saddle along the stable direction, and then slowly diverges fromthe saddle along the unstable direction, thereby resulting in a large period oscillation.As it is often the case in neuronal models, the saddle equilibrium is near a stable nodeequilibrium corresponding to the resting state, and the system is near the co-dimension2 saddle-node homoclinic orbit bifurcation studied in Sect. 6.3.6. As a result, thereis a drastic difference between the attraction and divergence rates to the saddle, sothat the dynamics in the shaded neighborhood of the saddle-node in the figure can bereduced to the one-dimensional V -equation, which in return can be transformed intothe “quadratic integrate-and-fire” formx ′ = −1 + x 2 , if x = +∞, then x ← x reset ,with solutions depicted in Fig. 10.38, bottom. The saddle and the node correspond tox = ±1, respectively. One can check by differentiating that the solution of the modelwith x(0) = x reset > 1, is x(t) = − coth(t − T ), where coth(s) = (e s + e −s )/(e s − e −s )is the hyperbolic cotangent, and T = acoth (x reset ) is the period of oscillation, whichbecomes infinite as x reset → 1.Using the results of Sect. 10.4.1, we find the functionQ(ϑ) = 1/(−1 + coth 2 (ϑ − T )) = sinh 2 (ϑ − T )whose graph is shown in Fig. 10.39a. For comparison, we plotted the numerically foundPRC for the I Na + I K -oscillator to illustrate the disagreement between the theoreticaland numerical curves in the region ϑ < 0.1T corresponding to the downstroke ofthe spike. Such a disagreement is somewhat expected, since the quadratic integrateand-firemodel ignores spike downstroke. If a pulse arriving during the downstroke
- Page 456 and 457: 446 ReferencesGuckenheimer J. (1975
- Page 458 and 459: 448 Referencestional Journal of Bif
- Page 460 and 461: 450 ReferencesMarkram H, Toledo-Rod
- Page 462 and 463: 452 ReferencesRosenblum M.G. and Pi
- Page 464 and 465: 454 ReferencesTuckwell H.C. (1988)
- Page 466 and 467: 456 References9
- Page 468 and 469: 458 Synchronization (see www.izhike
- Page 470 and 471: 460 Synchronization (see www.izhike
- Page 472 and 473: 462 Synchronization (see www.izhike
- Page 474 and 475: 464 Synchronization (see www.izhike
- Page 476 and 477: 466 Synchronization (see www.izhike
- Page 478 and 479: 468 Synchronization (see www.izhike
- Page 480 and 481: 470 Synchronization (see www.izhike
- Page 482 and 483: 472 Synchronization (see www.izhike
- Page 484 and 485: 474 Synchronization (see www.izhike
- Page 486 and 487: 476 Synchronization (see www.izhike
- Page 488 and 489: 478 Synchronization (see www.izhike
- Page 490 and 491: 480 Synchronization (see www.izhike
- Page 492 and 493: 482 Synchronization (see www.izhike
- Page 494 and 495: 484 Synchronization (see www.izhike
- Page 496 and 497: 486 Synchronization (see www.izhike
- Page 498 and 499: 488 Synchronization (see www.izhike
- Page 500 and 501: 490 Synchronization (see www.izhike
- Page 502 and 503: 492 Synchronization (see www.izhike
- Page 504 and 505: 494 Synchronization (see www.izhike
- Page 508 and 509: 498 Synchronization (see www.izhike
- Page 510 and 511: 500 Synchronization (see www.izhike
- Page 512 and 513: 502 Synchronization (see www.izhike
- Page 514 and 515: 504 Synchronization (see www.izhike
- Page 516 and 517: 506 Synchronization (see www.izhike
- Page 518 and 519: 508 Synchronization (see www.izhike
- Page 520 and 521: 510 Synchronization (see www.izhike
- Page 522 and 523: 512 Solutions to Exercises, Chap. 1
- Page 524 and 525: 514 Solutions to Exercises, Chap. 1
- Page 526 and 527: 516 Solutions to Exercises, Chap. 1
- Page 528: 518 Solutions to Exercises, Chap. 1
Synchronization (see www.izhikevich.com) 497(a)normalized PRC (Q1( ))0spikedownstroke00s<strong>in</strong>h 2 ( -T)-n'( )s<strong>in</strong>h 2 ( -T)numerical0.1T0 0.1T phase of oscillation,T(b)nBphase advancephase delayAVFigure 10.39: (a) Numerically found PRCs of the I Na + I K -oscillator near saddle-nodehomocl<strong>in</strong>ic orbit bifurcation (as <strong>in</strong> Fig. 10.38) us<strong>in</strong>g the MATLAB program <strong>in</strong> Ex. 12.Magnification shows the divergence from the theoretical curve s<strong>in</strong>h 2 (ϑ − T ) dur<strong>in</strong>g thespike. (b) A pulsed <strong>in</strong>put dur<strong>in</strong>g the downstroke of the spike can produce a significantphase delay (pulse A) or advance (pulse B) not captured by the quadratic <strong>in</strong>tegrateand-firemodel.Fig. 10.38, top. The spik<strong>in</strong>g trajectory <strong>in</strong> the figure quickly approaches a small shadedneighborhood of the saddle along the stable direction, and then slowly diverges fromthe saddle along the unstable direction, thereby result<strong>in</strong>g <strong>in</strong> a large period oscillation.As it is often the case <strong>in</strong> neuronal models, the saddle equilibrium is near a stable nodeequilibrium correspond<strong>in</strong>g to the rest<strong>in</strong>g state, and the system is near the co-dimension2 saddle-node homocl<strong>in</strong>ic orbit bifurcation studied <strong>in</strong> Sect. 6.3.6. As a result, thereis a drastic difference between the attraction and divergence rates to the saddle, sothat the dynamics <strong>in</strong> the shaded neighborhood of the saddle-node <strong>in</strong> the figure can bereduced to the one-dimensional V -equation, which <strong>in</strong> return can be transformed <strong>in</strong>tothe “quadratic <strong>in</strong>tegrate-and-fire” formx ′ = −1 + x 2 , if x = +∞, then x ← x reset ,with solutions depicted <strong>in</strong> Fig. 10.38, bottom. The saddle and the node correspond tox = ±1, respectively. One can check by differentiat<strong>in</strong>g that the solution of the modelwith x(0) = x reset > 1, is x(t) = − coth(t − T ), where coth(s) = (e s + e −s )/(e s − e −s )is the hyperbolic cotangent, and T = acoth (x reset ) is the period of oscillation, whichbecomes <strong>in</strong>f<strong>in</strong>ite as x reset → 1.Us<strong>in</strong>g the results of Sect. 10.4.1, we f<strong>in</strong>d the functionQ(ϑ) = 1/(−1 + coth 2 (ϑ − T )) = s<strong>in</strong>h 2 (ϑ − T )whose graph is shown <strong>in</strong> Fig. 10.39a. For comparison, we plotted the numerically foundPRC for the I Na + I K -oscillator to illustrate the disagreement between the theoreticaland numerical curves <strong>in</strong> the region ϑ < 0.1T correspond<strong>in</strong>g to the downstroke ofthe spike. Such a disagreement is somewhat expected, s<strong>in</strong>ce the quadratic <strong>in</strong>tegrateand-firemodel ignores spike downstroke. If a pulse arriv<strong>in</strong>g dur<strong>in</strong>g the downstroke


