Dynamical Systems in Neuroscience:
Dynamical Systems in Neuroscience: Dynamical Systems in Neuroscience:
412 Solutions to Exercises, Chap. 321.51xBifurcationDiagramstableb0.50stableunstableb-0.5-1Pitchforkbifurcationstable-1.5b-2-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3Representative Phase Portraits42xbx-x 321xbx-x 310.5xbx-x 30x0x0x-2-1-0.5-4-2 0 2b=-1-2-2 0 2-1-2 0 2b=0 b=+1Figure 10.6: Pitchfork bifurcation diagram and representative phase portraits of the system ẋ =bx − x 3 (see Chap. 3, Ex. 8).Voltage V40200-20-40-60excitedthresholdrest-800.5 1 1.5 2 2.5leak conductance g Lasaddle-node(fold)bifurcationsVoltage V500-50-100thresholdrestexcited-150-150 -100 -50 0leak reverse potential E Lbsaddle-node(fold)bifurcationsFigure 10.7: Bifurcation diagrams of the I Na,p -model (3.5) with bifurcation parameters (a) g L and(b) E L (see Chap. 3, Ex. 11).
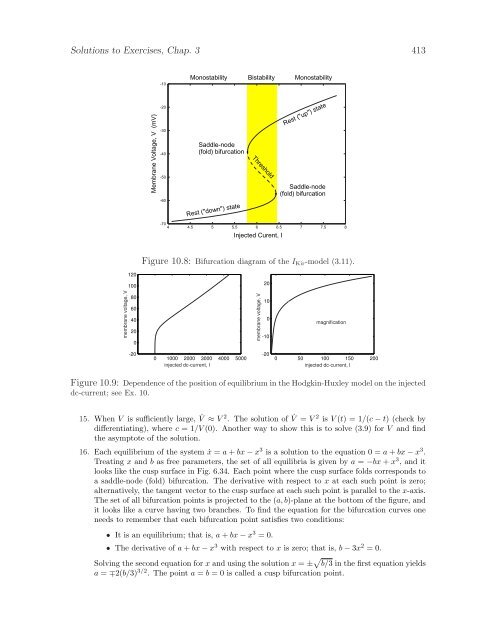
Solutions to Exercises, Chap. 3 413-10MonostabilityBistabilityMonostabilityMembrane Voltage, V (mV)-20-30-40-50-60Saddle-node(fold) bifurcationRest ("down") stateThreshold-704 4.5 5 5.5 6 6.5 7 7.5 8Injected Curent, IRest ("up") stateSaddle-node(fold) bifurcationFigure 10.8: Bifurcation diagram of the I Kir -model (3.11).12010020membrane voltage, V806040200membrane voltage, V100-10magnification-200 1000 2000 3000 4000 5000injected dc-current, I-200 50 100 150 200injected dc-current, IFigure 10.9: Dependence of the position of equilibrium in the Hodgkin-Huxley model on the injecteddc-current; see Ex. 10.15. When V is sufficiently large, ˙V ≈ V 2 . The solution of ˙V = V 2 is V (t) = 1/(c − t) (check bydifferentiating), where c = 1/V (0). Another way to show this is to solve (3.9) for V and findthe asymptote of the solution.16. Each equilibrium of the system ẋ = a + bx − x 3 is a solution to the equation 0 = a + bx − x 3 .Treating x and b as free parameters, the set of all equilibria is given by a = −bx + x 3 , and itlooks like the cusp surface in Fig. 6.34. Each point where the cusp surface folds corresponds toa saddle-node (fold) bifurcation. The derivative with respect to x at each such point is zero;alternatively, the tangent vector to the cusp surface at each such point is parallel to the x-axis.The set of all bifurcation points is projected to the (a, b)-plane at the bottom of the figure, andit looks like a curve having two branches. To find the equation for the bifurcation curves oneneeds to remember that each bifurcation point satisfies two conditions:• It is an equilibrium; that is, a + bx − x 3 = 0.• The derivative of a + bx − x 3 with respect to x is zero; that is, b − 3x 2 = 0.Solving the second equation for x and using the solution x = ± √ b/3 in the first equation yieldsa = ∓2(b/3) 3/2 . The point a = b = 0 is called a cusp bifurcation point.
- Page 372 and 373: 362 Burstingmembrane potential, V (
- Page 374 and 375: 364 Bursting9.3 ClassificationIn Fi
- Page 376 and 377: 366 Burstingbifurcation of spiking
- Page 378 and 379: 368 BurstingFigure 9.26: Putative
- Page 380 and 381: 370 Bursting108spikingslow variable
- Page 382 and 383: 372 Bursting(a)membrane potential,
- Page 384 and 385: 374 Burstingdepending on the type o
- Page 386 and 387: 376 BurstingsubcriticalAndronov-Hop
- Page 388 and 389: 378 Bursting(a)membrane potential,
- Page 390 and 391: spiking380 Burstingfoldbifurcations
- Page 392 and 393: 382 BurstingspikingsupercriticalAnd
- Page 394 and 395: 384 Burstingaction potentials cut2
- Page 396 and 397: 386 Bursting9.4.3 BistabilitySuppos
- Page 398 and 399: 388 BurstingFigure 9.49: The instan
- Page 400 and 401: esting390 Burstingspikesynchronizat
- Page 402 and 403: 392 BurstingReview of Important Con
- Page 404 and 405: 394 BurstingspikingrestingFigure 9.
- Page 406 and 407: 396 Bursting0-10membrane potential,
- Page 408 and 409: 398 Bursting0membrane potential, V
- Page 410 and 411: 400 BurstingFigure 9.61: A cycle-cy
- Page 412 and 413: 402 Bursting28. [Ph.D.] Develop an
- Page 414 and 415: 404 Synchronization (see www.izhike
- Page 416 and 417: 406 Synchronization (see www.izhike
- Page 418 and 419: 408 Solutions to Exercises, Chap. 3
- Page 420 and 421: 410 Solutions to Exercises, Chap. 3
- Page 424 and 425: 414 Solutions to Exercises, Chap. 4
- Page 426 and 427: 416 Solutions to Exercises, Chap. 4
- Page 428 and 429: 418 Solutions to Exercises, Chap. 4
- Page 430 and 431: 420 Solutions to Exercises, Chap. 4
- Page 432 and 433: 422 Solutions to Exercises, Chap. 5
- Page 434 and 435: 424 Solutions to Exercises, Chap. 6
- Page 436 and 437: 426 Solutions to Exercises, Chap. 6
- Page 438 and 439: 428 Solutions to Exercises, Chap. 8
- Page 440 and 441: 430 Solutions to Exercises, Chap. 9
- Page 442 and 443: 432 Solutions to Exercises, Chap. 9
- Page 444 and 445: 434 Solutions to Exercises, Chap. 9
- Page 446 and 447: 436 Solutions to Exercises, Chap. 9
- Page 448 and 449: 438 Solutions to Exercises, Chap. 9
- Page 450 and 451: 440 Solutions to Exercises, Chap. 9
- Page 452 and 453: 442 Referencesterneurons mediated b
- Page 454 and 455: 444 ReferencesDickson C.T., Magistr
- Page 456 and 457: 446 ReferencesGuckenheimer J. (1975
- Page 458 and 459: 448 Referencestional Journal of Bif
- Page 460 and 461: 450 ReferencesMarkram H, Toledo-Rod
- Page 462 and 463: 452 ReferencesRosenblum M.G. and Pi
- Page 464 and 465: 454 ReferencesTuckwell H.C. (1988)
- Page 466 and 467: 456 References9
- Page 468 and 469: 458 Synchronization (see www.izhike
- Page 470 and 471: 460 Synchronization (see www.izhike
Solutions to Exercises, Chap. 3 413-10MonostabilityBistabilityMonostabilityMembrane Voltage, V (mV)-20-30-40-50-60Saddle-node(fold) bifurcationRest ("down") stateThreshold-704 4.5 5 5.5 6 6.5 7 7.5 8Injected Curent, IRest ("up") stateSaddle-node(fold) bifurcationFigure 10.8: Bifurcation diagram of the I Kir -model (3.11).12010020membrane voltage, V806040200membrane voltage, V100-10magnification-200 1000 2000 3000 4000 5000<strong>in</strong>jected dc-current, I-200 50 100 150 200<strong>in</strong>jected dc-current, IFigure 10.9: Dependence of the position of equilibrium <strong>in</strong> the Hodgk<strong>in</strong>-Huxley model on the <strong>in</strong>jecteddc-current; see Ex. 10.15. When V is sufficiently large, ˙V ≈ V 2 . The solution of ˙V = V 2 is V (t) = 1/(c − t) (check bydifferentiat<strong>in</strong>g), where c = 1/V (0). Another way to show this is to solve (3.9) for V and f<strong>in</strong>dthe asymptote of the solution.16. Each equilibrium of the system ẋ = a + bx − x 3 is a solution to the equation 0 = a + bx − x 3 .Treat<strong>in</strong>g x and b as free parameters, the set of all equilibria is given by a = −bx + x 3 , and itlooks like the cusp surface <strong>in</strong> Fig. 6.34. Each po<strong>in</strong>t where the cusp surface folds corresponds toa saddle-node (fold) bifurcation. The derivative with respect to x at each such po<strong>in</strong>t is zero;alternatively, the tangent vector to the cusp surface at each such po<strong>in</strong>t is parallel to the x-axis.The set of all bifurcation po<strong>in</strong>ts is projected to the (a, b)-plane at the bottom of the figure, andit looks like a curve hav<strong>in</strong>g two branches. To f<strong>in</strong>d the equation for the bifurcation curves oneneeds to remember that each bifurcation po<strong>in</strong>t satisfies two conditions:• It is an equilibrium; that is, a + bx − x 3 = 0.• The derivative of a + bx − x 3 with respect to x is zero; that is, b − 3x 2 = 0.Solv<strong>in</strong>g the second equation for x and us<strong>in</strong>g the solution x = ± √ b/3 <strong>in</strong> the first equation yieldsa = ∓2(b/3) 3/2 . The po<strong>in</strong>t a = b = 0 is called a cusp bifurcation po<strong>in</strong>t.


