Metrics of curves in shape optimization and analysis - Andrea Carlo ...
Metrics of curves in shape optimization and analysis - Andrea Carlo ...
Metrics of curves in shape optimization and analysis - Andrea Carlo ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
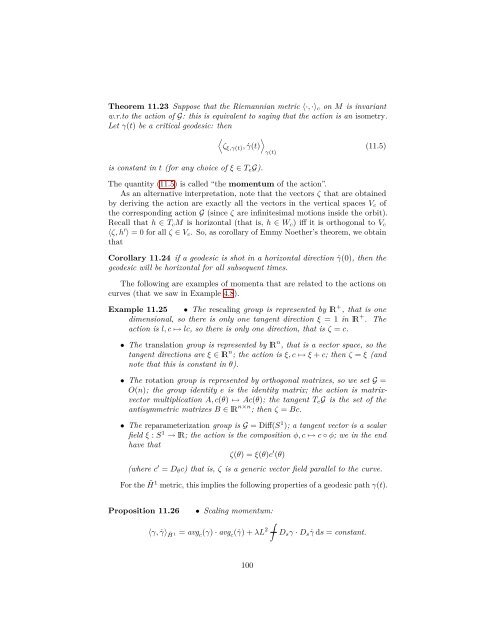
Theorem 11.23 Suppose that the Riemannian metric 〈·, ·〉 c on M is <strong>in</strong>variantw.r.to the action <strong>of</strong> G: this is equivalent to say<strong>in</strong>g that the action is an isometry.Let γ(t) be a critical geodesic: then〈 〉ζ ξ,γ(t) , ˙γ(t)(11.5)γ(t)is constant <strong>in</strong> t (for any choice <strong>of</strong> ξ ∈ T e G).The quantity (11.5) is called “the momentum <strong>of</strong> the action”.As an alternative <strong>in</strong>terpretation, note that the vectors ζ that are obta<strong>in</strong>edby deriv<strong>in</strong>g the action are exactly all the vectors <strong>in</strong> the vertical spaces V c <strong>of</strong>the correspond<strong>in</strong>g action G (s<strong>in</strong>ce ζ are <strong>in</strong>f<strong>in</strong>itesimal motions <strong>in</strong>side the orbit).Recall that h ∈ T c M is horizontal (that is, h ∈ W c ) iff it is orthogonal to V c〈ζ, h ′ 〉 = 0 for all ζ ∈ V c . So, as corollary <strong>of</strong> Emmy Noether’s theorem, we obta<strong>in</strong>thatCorollary 11.24 if a geodesic is shot <strong>in</strong> a horizontal direction ˙γ(0), then thegeodesic will be horizontal for all subsequent times.The follow<strong>in</strong>g are examples <strong>of</strong> momenta that are related to the actions on<strong>curves</strong> (that we saw <strong>in</strong> Example 4.8).Example 11.25 • The rescal<strong>in</strong>g group is represented by lR + , that is onedimensional, so there is only one tangent direction ξ = 1 <strong>in</strong> lR + . Theaction is l, c ↦→ lc, so there is only one direction, that is ζ = c.• The translation group is represented by lR n , that is a vector space, so thetangent directions are ξ ∈ lR n ; the action is ξ, c ↦→ ξ + c; then ζ = ξ (<strong>and</strong>note that this is constant <strong>in</strong> θ).• The rotation group is represented by orthogonal matrixes, so we set G =O(n); the group identity e is the identity matrix; the action is matrixvectormultiplication A, c(θ) ↦→ Ac(θ); the tangent T e G is the set <strong>of</strong> theantisymmetric matrixes B ∈ lR n×n ; then ζ = Bc.• The reparameterization group is G = Diff(S 1 ); a tangent vector is a scalarfield ξ : S 1 → lR; the action is the composition φ, c ↦→ c ◦ φ; we <strong>in</strong> the endhave thatζ(θ) = ξ(θ)c ′ (θ)(where c ′ = D θ c) that is, ζ is a generic vector field parallel to the curve.For the ˜H 1 metric, this implies the follow<strong>in</strong>g properties <strong>of</strong> a geodesic path γ(t).Proposition 11.26 • Scal<strong>in</strong>g momentum:∫〈γ, ˙γ〉 ˜H1= avg c (γ) · avg c ( ˙γ) + λL 2D s γ · D s ˙γ ds = constant.100





![4. Ghost [Å] vowels in French - Laboratorio di Linguistica](https://img.yumpu.com/49999334/1/184x260/4-ghost-a-vowels-in-french-laboratorio-di-linguistica.jpg?quality=85)