v2010.10.26 - Convex Optimization
v2010.10.26 - Convex Optimization v2010.10.26 - Convex Optimization
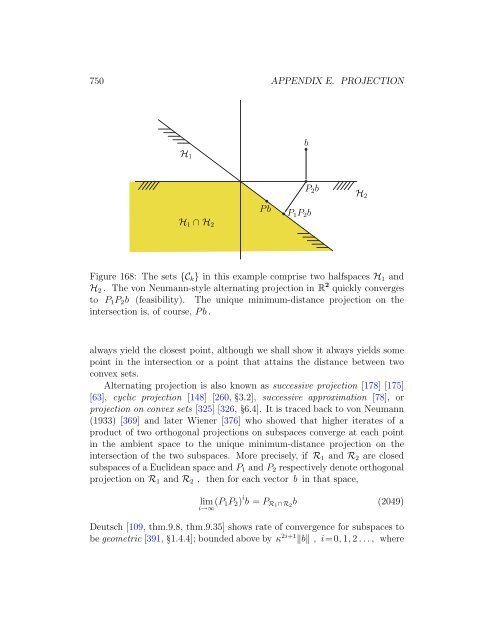
750 APPENDIX E. PROJECTIONbH 1H 2P 2 bH 1 ∩ H 2PbP 1 P 2 bFigure 168: The sets {C k } in this example comprise two halfspaces H 1 andH 2 . The von Neumann-style alternating projection in R 2 quickly convergesto P 1 P 2 b (feasibility). The unique minimum-distance projection on theintersection is, of course, Pb .always yield the closest point, although we shall show it always yields somepoint in the intersection or a point that attains the distance between twoconvex sets.Alternating projection is also known as successive projection [178] [175][63], cyclic projection [148] [260,3.2], successive approximation [78], orprojection on convex sets [325] [326,6.4]. It is traced back to von Neumann(1933) [369] and later Wiener [376] who showed that higher iterates of aproduct of two orthogonal projections on subspaces converge at each pointin the ambient space to the unique minimum-distance projection on theintersection of the two subspaces. More precisely, if R 1 and R 2 are closedsubspaces of a Euclidean space and P 1 and P 2 respectively denote orthogonalprojection on R 1 and R 2 , then for each vector b in that space,lim (P 1P 2 ) i b = P R1 ∩ R 2b (2049)i→∞Deutsch [109, thm.9.8, thm.9.35] shows rate of convergence for subspaces tobe geometric [391,1.4.4]; bounded above by κ 2i+1 ‖b‖ , i=0, 1, 2..., where
E.10. ALTERNATING PROJECTION 7510≤κ
- Page 699 and 700: Appendix EProjectionFor any A∈ R
- Page 701 and 702: 701U T = U † for orthonormal (inc
- Page 703 and 704: E.1. IDEMPOTENT MATRICES 703where A
- Page 705 and 706: E.1. IDEMPOTENT MATRICES 705order,
- Page 707 and 708: E.1. IDEMPOTENT MATRICES 707are lin
- Page 709 and 710: E.3. SYMMETRIC IDEMPOTENT MATRICES
- Page 711 and 712: E.3. SYMMETRIC IDEMPOTENT MATRICES
- Page 713 and 714: E.3. SYMMETRIC IDEMPOTENT MATRICES
- Page 715 and 716: E.4. ALGEBRA OF PROJECTION ON AFFIN
- Page 717 and 718: E.5. PROJECTION EXAMPLES 717a ∗ 2
- Page 719 and 720: E.5. PROJECTION EXAMPLES 719where Y
- Page 721 and 722: E.5. PROJECTION EXAMPLES 721(B.4.2)
- Page 723 and 724: E.6. VECTORIZATION INTERPRETATION,
- Page 725 and 726: E.6. VECTORIZATION INTERPRETATION,
- Page 727 and 728: E.6. VECTORIZATION INTERPRETATION,
- Page 729 and 730: E.7. PROJECTION ON MATRIX SUBSPACES
- Page 731 and 732: E.7. PROJECTION ON MATRIX SUBSPACES
- Page 733 and 734: E.8. RANGE/ROWSPACE INTERPRETATION
- Page 735 and 736: E.9. PROJECTION ON CONVEX SET 735As
- Page 737 and 738: E.9. PROJECTION ON CONVEX SET 737Wi
- Page 739 and 740: E.9. PROJECTION ON CONVEX SET 739R(
- Page 741 and 742: E.9. PROJECTION ON CONVEX SET 741E.
- Page 743 and 744: E.9. PROJECTION ON CONVEX SET 743E.
- Page 745 and 746: E.9. PROJECTION ON CONVEX SET 745Un
- Page 747 and 748: E.9. PROJECTION ON CONVEX SET 747ac
- Page 749: E.10. ALTERNATING PROJECTION 749bC
- Page 753 and 754: E.10. ALTERNATING PROJECTION 753E.1
- Page 755 and 756: E.10. ALTERNATING PROJECTION 755y 2
- Page 757 and 758: E.10. ALTERNATING PROJECTION 757Def
- Page 759 and 760: E.10. ALTERNATING PROJECTION 759Dis
- Page 761 and 762: E.10. ALTERNATING PROJECTION 761mat
- Page 763 and 764: E.10. ALTERNATING PROJECTION 763K
- Page 765 and 766: E.10. ALTERNATING PROJECTION 765E.1
- Page 767 and 768: E.10. ALTERNATING PROJECTION 767E.1
- Page 769 and 770: Appendix FNotation and a few defini
- Page 771 and 772: 771A ij or A(i, j) , ij th entry of
- Page 773 and 774: 773⊞orthogonal vector sum of sets
- Page 775 and 776: 775x +vector x whose negative entri
- Page 777 and 778: 777X point list ((76) having cardin
- Page 779 and 780: 779SDPSVDSNRdBEDMS n 1S n hS n⊥hS
- Page 781 and 782: 781vectorentrycubixquartixfeasible
- Page 783 and 784: 783Oorder of magnitude information
- Page 785 and 786: 785cofmatrix of cofactors correspon
- Page 787 and 788: Bibliography[1] Edwin A. Abbott. Fl
- Page 789 and 790: BIBLIOGRAPHY 789[23] Dror Baron, Mi
- Page 791 and 792: BIBLIOGRAPHY 791[49] Leonard M. Blu
- Page 793 and 794: BIBLIOGRAPHY 793[74] Yves Chabrilla
- Page 795 and 796: BIBLIOGRAPHY 795[102] Etienne de Kl
- Page 797 and 798: BIBLIOGRAPHY 797[129] Carl Eckart a
- Page 799 and 800: BIBLIOGRAPHY 799[154] James Gleik.
750 APPENDIX E. PROJECTIONbH 1H 2P 2 bH 1 ∩ H 2PbP 1 P 2 bFigure 168: The sets {C k } in this example comprise two halfspaces H 1 andH 2 . The von Neumann-style alternating projection in R 2 quickly convergesto P 1 P 2 b (feasibility). The unique minimum-distance projection on theintersection is, of course, Pb .always yield the closest point, although we shall show it always yields somepoint in the intersection or a point that attains the distance between twoconvex sets.Alternating projection is also known as successive projection [178] [175][63], cyclic projection [148] [260,3.2], successive approximation [78], orprojection on convex sets [325] [326,6.4]. It is traced back to von Neumann(1933) [369] and later Wiener [376] who showed that higher iterates of aproduct of two orthogonal projections on subspaces converge at each pointin the ambient space to the unique minimum-distance projection on theintersection of the two subspaces. More precisely, if R 1 and R 2 are closedsubspaces of a Euclidean space and P 1 and P 2 respectively denote orthogonalprojection on R 1 and R 2 , then for each vector b in that space,lim (P 1P 2 ) i b = P R1 ∩ R 2b (2049)i→∞Deutsch [109, thm.9.8, thm.9.35] shows rate of convergence for subspaces tobe geometric [391,1.4.4]; bounded above by κ 2i+1 ‖b‖ , i=0, 1, 2..., where


