v2010.10.26 - Convex Optimization
v2010.10.26 - Convex Optimization v2010.10.26 - Convex Optimization
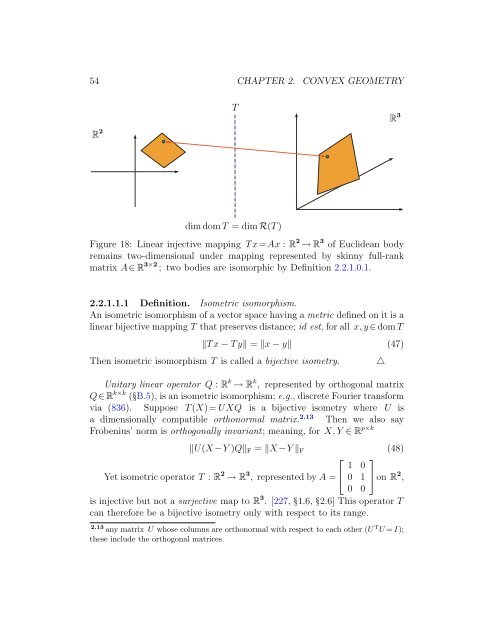
54 CHAPTER 2. CONVEX GEOMETRYTR 2 R 3dim domT = dim R(T)Figure 18: Linear injective mapping Tx=Ax : R 2 → R 3 of Euclidean bodyremains two-dimensional under mapping represented by skinny full-rankmatrix A∈ R 3×2 ; two bodies are isomorphic by Definition 2.2.1.0.1.2.2.1.1.1 Definition. Isometric isomorphism.An isometric isomorphism of a vector space having a metric defined on it is alinear bijective mapping T that preserves distance; id est, for all x,y ∈dom T‖Tx − Ty‖ = ‖x − y‖ (47)Then isometric isomorphism T is called a bijective isometry.Unitary linear operator Q : R k → R k , represented by orthogonal matrixQ∈ R k×k (B.5), is an isometric isomorphism; e.g., discrete Fourier transformvia (836). Suppose T(X)= UXQ is a bijective isometry where U isa dimensionally compatible orthonormal matrix. 2.13 Then we also sayFrobenius’ norm is orthogonally invariant; meaning, for X,Y ∈ R p×k‖U(X −Y )Q‖ F = ‖X −Y ‖ F (48)⎡ ⎤1 0Yet isometric operator T : R 2 → R 3 , represented by A = ⎣ 0 1 ⎦on R 2 ,0 0is injective but not a surjective map to R 3 . [227,1.6,2.6] This operator Tcan therefore be a bijective isometry only with respect to its range.2.13 any matrix U whose columns are orthonormal with respect to each other (U T U = I);these include the orthogonal matrices.△
2.2. VECTORIZED-MATRIX INNER PRODUCT 55BR 3PTR 3PT(B)xPTxFigure 19: Linear noninjective mapping PTx=A † Ax : R 3 → R 3 ofthree-dimensional Euclidean body B has affine dimension 2 under projectionon rowspace of fat full-rank matrix A∈ R 2×3 . Set of coefficients of orthogonalprojection T B = {Ax |x∈ B} is isomorphic with projection P(T B) [sic].Any linear injective transformation on Euclidean space is uniquelyinvertible on its range. In fact, any linear injective transformation has arange whose dimension equals that of its domain. In other words, for anyinvertible linear transformation T [ibidem]dim dom(T) = dim R(T) (49)e.g., T represented by skinny-or-square full-rank matrices. (Figure 18) Animportant consequence of this fact is:Affine dimension, of any n-dimensional Euclidean body in domain ofoperator T , is invariant to linear injective transformation.2.2.1.2 Noninjective linear operatorsMappings in Euclidean space created by noninjective linear operators can becharacterized in terms of an orthogonal projector (E). Consider noninjectivelinear operator Tx =Ax : R n → R m represented by fat matrix A∈ R m×n(m< n). What can be said about the nature of this m-dimensional mapping?
- Page 3 and 4: Convex Optimization&Euclidean Dista
- Page 5 and 6: for Jennie Columba♦Antonio♦♦&
- Page 7 and 8: PreludeThe constant demands of my d
- Page 9 and 10: Convex Optimization&Euclidean Dista
- Page 11 and 12: CONVEX OPTIMIZATION & EUCLIDEAN DIS
- Page 13 and 14: List of Figures1 Overview 211 Orion
- Page 15 and 16: LIST OF FIGURES 1562 Shrouded polyh
- Page 17: LIST OF FIGURES 17130 Elliptope E 3
- Page 21 and 22: Chapter 1OverviewConvex Optimizatio
- Page 23 and 24: ˇx 4ˇx 3ˇx 2Figure 2: Applicatio
- Page 25 and 26: 25Figure 4: This coarsely discretiz
- Page 27 and 28: (biorthogonal expansion) is examine
- Page 29 and 30: 29cardinality Boolean solution to a
- Page 31 and 32: 31Figure 8: Robotic vehicles in con
- Page 33 and 34: an elaborate exposition offering in
- Page 35 and 36: Chapter 2Convex geometryConvexity h
- Page 37 and 38: 2.1. CONVEX SET 372.1.2 linear inde
- Page 39 and 40: 2.1. CONVEX SET 392.1.6 empty set v
- Page 41 and 42: 2.1. CONVEX SET 41(a)R(b)R 2(c)R 3F
- Page 43 and 44: 2.1. CONVEX SET 43where Q∈ R 3×3
- Page 45 and 46: 2.1. CONVEX SET 45Now let’s move
- Page 47 and 48: 2.1. CONVEX SET 47By additive inver
- Page 49 and 50: 2.1. CONVEX SET 49R nR mR(A T )x px
- Page 51 and 52: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 53: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 57 and 58: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 59 and 60: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 61 and 62: 2.3. HULLS 61Figure 20: Convex hull
- Page 63 and 64: 2.3. HULLS 63Aaffine hull (drawn tr
- Page 65 and 66: 2.3. HULLS 65subset of the affine h
- Page 67 and 68: 2.3. HULLS 672.3.2.0.2 Example. Nuc
- Page 69 and 70: 2.3. HULLS 692.3.2.0.3 Exercise. Co
- Page 71 and 72: 2.3. HULLS 71Figure 24: A simplicia
- Page 73 and 74: 2.4. HALFSPACE, HYPERPLANE 73H + =
- Page 75 and 76: 2.4. HALFSPACE, HYPERPLANE 7511−1
- Page 77 and 78: 2.4. HALFSPACE, HYPERPLANE 772.4.2.
- Page 79 and 80: 2.4. HALFSPACE, HYPERPLANE 792.4.2.
- Page 81 and 82: 2.4. HALFSPACE, HYPERPLANE 81tradit
- Page 83 and 84: 2.4. HALFSPACE, HYPERPLANE 832.4.2.
- Page 85 and 86: 2.5. SUBSPACE REPRESENTATIONS 852.5
- Page 87 and 88: 2.5. SUBSPACE REPRESENTATIONS 87(Ex
- Page 89 and 90: 2.5. SUBSPACE REPRESENTATIONS 89(a)
- Page 91 and 92: 2.5. SUBSPACE REPRESENTATIONS 91are
- Page 93 and 94: 2.6. EXTREME, EXPOSED 93A one-dimen
- Page 95 and 96: 2.6. EXTREME, EXPOSED 952.6.1.1 Den
- Page 97 and 98: 2.7. CONES 97X(a)00(b)XFigure 33: (
- Page 99 and 100: 2.7. CONES 99XXFigure 37: Truncated
- Page 101 and 102: 2.7. CONES 101Figure 39: Not a cone
- Page 103 and 104: 2.7. CONES 103cone that is a halfli
54 CHAPTER 2. CONVEX GEOMETRYTR 2 R 3dim domT = dim R(T)Figure 18: Linear injective mapping Tx=Ax : R 2 → R 3 of Euclidean bodyremains two-dimensional under mapping represented by skinny full-rankmatrix A∈ R 3×2 ; two bodies are isomorphic by Definition 2.2.1.0.1.2.2.1.1.1 Definition. Isometric isomorphism.An isometric isomorphism of a vector space having a metric defined on it is alinear bijective mapping T that preserves distance; id est, for all x,y ∈dom T‖Tx − Ty‖ = ‖x − y‖ (47)Then isometric isomorphism T is called a bijective isometry.Unitary linear operator Q : R k → R k , represented by orthogonal matrixQ∈ R k×k (B.5), is an isometric isomorphism; e.g., discrete Fourier transformvia (836). Suppose T(X)= UXQ is a bijective isometry where U isa dimensionally compatible orthonormal matrix. 2.13 Then we also sayFrobenius’ norm is orthogonally invariant; meaning, for X,Y ∈ R p×k‖U(X −Y )Q‖ F = ‖X −Y ‖ F (48)⎡ ⎤1 0Yet isometric operator T : R 2 → R 3 , represented by A = ⎣ 0 1 ⎦on R 2 ,0 0is injective but not a surjective map to R 3 . [227,1.6,2.6] This operator Tcan therefore be a bijective isometry only with respect to its range.2.13 any matrix U whose columns are orthonormal with respect to each other (U T U = I);these include the orthogonal matrices.△


