v2010.10.26 - Convex Optimization
v2010.10.26 - Convex Optimization v2010.10.26 - Convex Optimization
310 CHAPTER 4. SEMIDEFINITE PROGRAMMINGis known in closed form (p.658): Given ordered diagonalizationG ⋆ = QΛQ T ∈ S N (A.5.1), then direction matrix W = U ⋆ U ⋆T is optimal andextreme where U ⋆ = Q(:, n+1:N)∈ R N×N−n . Eigenvalue vector λ(W) has 1in each entry corresponding to the N − n smallest entries of δ(Λ) and has 0elsewhere. By (221) (223), polar direction −W can be regarded as pointingtoward the set of all rank-n (or less) positive semidefinite matrices whosenullspace contains that of G ⋆ . For that particular closed-form solution W ,consequently (confer (760))N∑λ(G ⋆ ) i = 〈G ⋆ , W 〉 = λ(G ⋆ ) T λ(W) (738)i=n+1This is the connection to cardinality minimization of vectors; 4.25 id est,eigenvalue λ cardinality (rank) is analogous to vector x cardinality via (760).So as not to be misconstrued under closed-form solution W to (1700a):Define (confer (221))S n {(I −W)G(I −W) |G∈ S N } = {X ∈ S N | N(X) ⊇ N(G ⋆ )} (739)as the symmetric subspace of rank≤n matrices whose nullspace containsN(G ⋆ ). Then projection of G ⋆ on S n is (I −W)G ⋆ (I −W). (E.7)Direction of projection is −WG ⋆ W . (Figure 83) tr(WG ⋆ W) is ameasure of proximity to S n because its orthogonal complement isSn ⊥ = {WGW |G∈ S N } ; the point being, convex iteration incorporatingconstrained tr(WGW) = 〈G , W 〉 minimization is not a projection method:certainly, not on these two subspaces.Closed-form solution W to problem (1700a), though efficient, comes witha caveat: there exist cases where this projection matrix solution W does notprovide the most efficient route to an optimal rank-n solution G ⋆ ; id est,direction W is not unique. So we sometimes choose to solve (1700a) insteadof employing a known closed-form solution.4.25 not trace minimization of a nonnegative diagonal matrix δ(x) as in [135,1] [300,2].To make rank-constrained problem (735) resemble cardinality problem (530), we couldmake C an affine subset:find X ∈ S Nsubject to Asvec X = bX ≽ 0rankX ≤ n
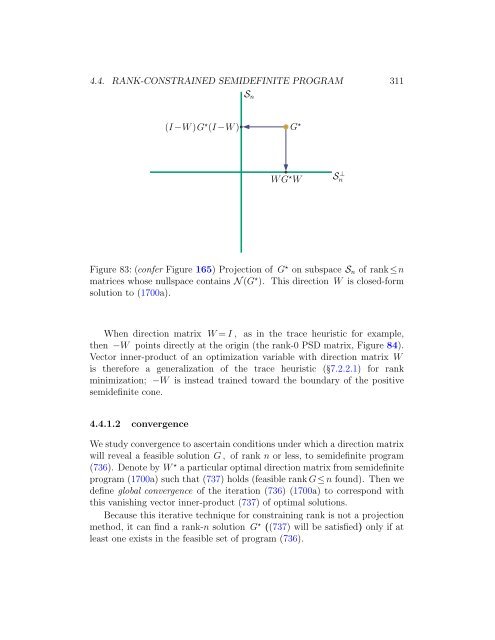
4.4. RANK-CONSTRAINED SEMIDEFINITE PROGRAM 311S n(I −W)G ⋆ (I −W)G ⋆WG ⋆ WS ⊥ nFigure 83: (confer Figure 165) Projection of G ⋆ on subspace S n of rank≤nmatrices whose nullspace contains N(G ⋆ ). This direction W is closed-formsolution to (1700a).When direction matrix W = I , as in the trace heuristic for example,then −W points directly at the origin (the rank-0 PSD matrix, Figure 84).Vector inner-product of an optimization variable with direction matrix Wis therefore a generalization of the trace heuristic (7.2.2.1) for rankminimization; −W is instead trained toward the boundary of the positivesemidefinite cone.4.4.1.2 convergenceWe study convergence to ascertain conditions under which a direction matrixwill reveal a feasible solution G , of rank n or less, to semidefinite program(736). Denote by W ⋆ a particular optimal direction matrix from semidefiniteprogram (1700a) such that (737) holds (feasible rankG≤n found). Then wedefine global convergence of the iteration (736) (1700a) to correspond withthis vanishing vector inner-product (737) of optimal solutions.Because this iterative technique for constraining rank is not a projectionmethod, it can find a rank-n solution G ⋆ ((737) will be satisfied) only if atleast one exists in the feasible set of program (736).
- Page 259 and 260: 3.6. GRADIENT 259αβα ≥ β ≥
- Page 261 and 262: 3.6. GRADIENT 2613.6.4 second-order
- Page 263 and 264: 3.7. CONVEX MATRIX-VALUED FUNCTION
- Page 265 and 266: 3.7. CONVEX MATRIX-VALUED FUNCTION
- Page 267 and 268: 3.7. CONVEX MATRIX-VALUED FUNCTION
- Page 269 and 270: 3.8. QUASICONVEX 269exponential alw
- Page 271 and 272: 3.9. SALIENT PROPERTIES 2713.8.0.0.
- Page 273 and 274: Chapter 4Semidefinite programmingPr
- Page 275 and 276: 4.1. CONIC PROBLEM 275(confer p.162
- Page 277 and 278: 4.1. CONIC PROBLEM 277PCsemidefinit
- Page 279 and 280: 4.1. CONIC PROBLEM 279is the affine
- Page 281 and 282: 4.1. CONIC PROBLEM 281faces of S 3
- Page 283 and 284: 4.1. CONIC PROBLEM 2834.1.2.3 Previ
- Page 285 and 286: 4.2. FRAMEWORK 285Semidefinite Fark
- Page 287 and 288: 4.2. FRAMEWORK 287On the other hand
- Page 289 and 290: 4.2. FRAMEWORK 2894.2.2.1 Dual prob
- Page 291 and 292: 4.2. FRAMEWORK 291For symmetric pos
- Page 293 and 294: 4.2. FRAMEWORK 293has norm ‖x ⋆
- Page 295 and 296: 4.2. FRAMEWORK 295minimize 1 TˆxX
- Page 297 and 298: 4.2. FRAMEWORK 297asminimize ‖ỹ
- Page 299 and 300: 4.3. RANK REDUCTION 2994.3 Rank red
- Page 301 and 302: 4.3. RANK REDUCTION 301A rank-reduc
- Page 303 and 304: 4.3. RANK REDUCTION 303(t ⋆ i)
- Page 305 and 306: 4.3. RANK REDUCTION 3054.3.3.0.1 Ex
- Page 307 and 308: 4.3. RANK REDUCTION 3074.3.3.0.2 Ex
- Page 309: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 313 and 314: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 315 and 316: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 317 and 318: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 319 and 320: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 321 and 322: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 323 and 324: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 325 and 326: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 327 and 328: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 329 and 330: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 331 and 332: 4.4. RANK-CONSTRAINED SEMIDEFINITE
- Page 333 and 334: 4.5. CONSTRAINING CARDINALITY 333mi
- Page 335 and 336: 4.5. CONSTRAINING CARDINALITY 3350R
- Page 337 and 338: 4.5. CONSTRAINING CARDINALITY 337it
- Page 339 and 340: 4.5. CONSTRAINING CARDINALITY 339m/
- Page 341 and 342: 4.5. CONSTRAINING CARDINALITY 341we
- Page 343 and 344: 4.5. CONSTRAINING CARDINALITY 343fl
- Page 345 and 346: 4.5. CONSTRAINING CARDINALITY 345We
- Page 347 and 348: 4.5. CONSTRAINING CARDINALITY 3474.
- Page 349 and 350: 4.5. CONSTRAINING CARDINALITY 349R
- Page 351 and 352: 4.5. CONSTRAINING CARDINALITY 351pe
- Page 353 and 354: 4.6. CARDINALITY AND RANK CONSTRAIN
- Page 355 and 356: 4.6. CARDINALITY AND RANK CONSTRAIN
- Page 357 and 358: 4.6. CARDINALITY AND RANK CONSTRAIN
- Page 359 and 360: 4.6. CARDINALITY AND RANK CONSTRAIN
4.4. RANK-CONSTRAINED SEMIDEFINITE PROGRAM 311S n(I −W)G ⋆ (I −W)G ⋆WG ⋆ WS ⊥ nFigure 83: (confer Figure 165) Projection of G ⋆ on subspace S n of rank≤nmatrices whose nullspace contains N(G ⋆ ). This direction W is closed-formsolution to (1700a).When direction matrix W = I , as in the trace heuristic for example,then −W points directly at the origin (the rank-0 PSD matrix, Figure 84).Vector inner-product of an optimization variable with direction matrix Wis therefore a generalization of the trace heuristic (7.2.2.1) for rankminimization; −W is instead trained toward the boundary of the positivesemidefinite cone.4.4.1.2 convergenceWe study convergence to ascertain conditions under which a direction matrixwill reveal a feasible solution G , of rank n or less, to semidefinite program(736). Denote by W ⋆ a particular optimal direction matrix from semidefiniteprogram (1700a) such that (737) holds (feasible rankG≤n found). Then wedefine global convergence of the iteration (736) (1700a) to correspond withthis vanishing vector inner-product (737) of optimal solutions.Because this iterative technique for constraining rank is not a projectionmethod, it can find a rank-n solution G ⋆ ((737) will be satisfied) only if atleast one exists in the feasible set of program (736).


