v2010.10.26 - Convex Optimization
v2010.10.26 - Convex Optimization v2010.10.26 - Convex Optimization
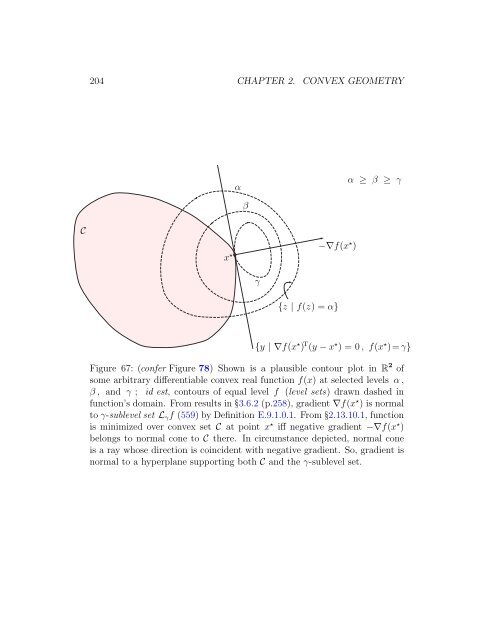
204 CHAPTER 2. CONVEX GEOMETRYαα ≥ β ≥ γβCx ⋆ −∇f(x ⋆ )γ{z | f(z) = α}{y | ∇f(x ⋆ ) T (y − x ⋆ ) = 0, f(x ⋆ )=γ}Figure 67: (confer Figure 78) Shown is a plausible contour plot in R 2 ofsome arbitrary differentiable convex real function f(x) at selected levels α ,β , and γ ; id est, contours of equal level f (level sets) drawn dashed infunction’s domain. From results in3.6.2 (p.258), gradient ∇f(x ⋆ ) is normalto γ-sublevel set L γ f (559) by Definition E.9.1.0.1. From2.13.10.1, functionis minimized over convex set C at point x ⋆ iff negative gradient −∇f(x ⋆ )belongs to normal cone to C there. In circumstance depicted, normal coneis a ray whose direction is coincident with negative gradient. So, gradient isnormal to a hyperplane supporting both C and the γ-sublevel set.
2.13. DUAL CONE & GENERALIZED INEQUALITY 2052.13.10.1.2 Example. Optimality conditions for conic problem.Consider a convex optimization problem having real differentiable convexobjective function f(x) : R n →R defined on domain R nminimize f(x)xsubject to x ∈ K(454)Let’s first suppose that the feasible set is a pointed polyhedral cone Kpossessing a linearly independent set of generators and whose subspacemembership is made explicit by fat full-rank matrix C ∈ R p×n ; id est, weare given the halfspace-description, for A∈ R m×nK = {x | Ax ≽ 0, Cx = 0} ⊆ R n(287a)(We’ll generalize to any convex cone K shortly.) Vertex-description of thiscone, assuming (ÂZ)† skinny-or-square full-rank, isK = {Z(ÂZ)† b | b ≽ 0} (444)where Â∈ Rm−l×n , l is the number of conically dependent rows in AZ (2.10)which must be removed, and Z ∈ R n×n−rank C holds basis N(C) columnar.From optimality condition (352),because∇f(x ⋆ ) T (Z(ÂZ)† b − x ⋆ )≥ 0 ∀b ≽ 0 (455)−∇f(x ⋆ ) T Z(ÂZ)† (b − b ⋆ )≤ 0 ∀b ≽ 0 (456)x ⋆ Z(ÂZ)† b ⋆ ∈ K (457)From membership relation (450) and Example 2.13.10.1.1〈−(Z T Â T ) † Z T ∇f(x ⋆ ), b − b ⋆ 〉 ≤ 0 for all b ∈ R m−l+⇔(458)−(Z T Â T ) † Z T ∇f(x ⋆ ) ∈ −R m−l+ ∩ b ⋆⊥Then equivalent necessary and sufficient conditions for optimality of conicproblem (454) with feasible set K are: (confer (362))(Z T Â T ) † Z T ∇f(x ⋆ ) ≽R m−l+0, b ⋆ ≽ 0, ∇f(x ⋆ ) T Z(ÂZ)† b ⋆ = 0 (459)R m−l+
- Page 153 and 154: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 155 and 156: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 157 and 158: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 159 and 160: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 161 and 162: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 163 and 164: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 165 and 166: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 167 and 168: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 169 and 170: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 171 and 172: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 173 and 174: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 175 and 176: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 177 and 178: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 179 and 180: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 181 and 182: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 183 and 184: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 185 and 186: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 187 and 188: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 189 and 190: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 191 and 192: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 193 and 194: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 195 and 196: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 197 and 198: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 199 and 200: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 201 and 202: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 203: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 207 and 208: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 209 and 210: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 211 and 212: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 213 and 214: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 215 and 216: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 217 and 218: 2.13. DUAL CONE & GENERALIZED INEQU
- Page 219 and 220: Chapter 3Geometry of convex functio
- Page 221 and 222: 3.1. CONVEX FUNCTION 221f 1 (x)f 2
- Page 223 and 224: 3.1. CONVEX FUNCTION 223Rf(b)f(X
- Page 225 and 226: 3.2. PRACTICAL NORM FUNCTIONS, ABSO
- Page 227 and 228: 3.2. PRACTICAL NORM FUNCTIONS, ABSO
- Page 229 and 230: 3.2. PRACTICAL NORM FUNCTIONS, ABSO
- Page 231 and 232: 3.2. PRACTICAL NORM FUNCTIONS, ABSO
- Page 233 and 234: 3.2. PRACTICAL NORM FUNCTIONS, ABSO
- Page 235 and 236: 3.3. INVERTED FUNCTIONS AND ROOTS 2
- Page 237 and 238: 3.4. AFFINE FUNCTION 237rather]x >
- Page 239 and 240: 3.4. AFFINE FUNCTION 239f(z)Az 2z 1
- Page 241 and 242: 3.5. EPIGRAPH, SUBLEVEL SET 241{a T
- Page 243 and 244: 3.5. EPIGRAPH, SUBLEVEL SET 243Subl
- Page 245 and 246: 3.5. EPIGRAPH, SUBLEVEL SET 245wher
- Page 247 and 248: 3.5. EPIGRAPH, SUBLEVEL SET 247part
- Page 249 and 250: 3.5. EPIGRAPH, SUBLEVEL SET 249that
- Page 251 and 252: 3.6. GRADIENT 251respect to its vec
- Page 253 and 254: 3.6. GRADIENT 253Invertibility is g
204 CHAPTER 2. CONVEX GEOMETRYαα ≥ β ≥ γβCx ⋆ −∇f(x ⋆ )γ{z | f(z) = α}{y | ∇f(x ⋆ ) T (y − x ⋆ ) = 0, f(x ⋆ )=γ}Figure 67: (confer Figure 78) Shown is a plausible contour plot in R 2 ofsome arbitrary differentiable convex real function f(x) at selected levels α ,β , and γ ; id est, contours of equal level f (level sets) drawn dashed infunction’s domain. From results in3.6.2 (p.258), gradient ∇f(x ⋆ ) is normalto γ-sublevel set L γ f (559) by Definition E.9.1.0.1. From2.13.10.1, functionis minimized over convex set C at point x ⋆ iff negative gradient −∇f(x ⋆ )belongs to normal cone to C there. In circumstance depicted, normal coneis a ray whose direction is coincident with negative gradient. So, gradient isnormal to a hyperplane supporting both C and the γ-sublevel set.


