JeppView : EDDL (48 charts)
JeppView : EDDL (48 charts)
JeppView : EDDL (48 charts)
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
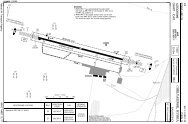
If you like to use this <strong>charts</strong>, please, buy a subscription for nDAC.For rutracker.org30 - 7 12 NOV 12Germany - <strong>EDDL</strong> / DUSSID RWY 05R RNAV GPS/FMS Overlay South DUSSELDORFDusseldorf GND121.9121.6TA 5000 AD Elev 147CLR DLV TWR Langen RAD ATIS (D)Datalink 121.775 118.3 133.775 123.775only128.5 115.15DusseldorfD115.15 DUSN51 17.0E006 45.2NorvenichD116.2 NORN50 50.4E006 41.7D6.4DUS212°NOR3Z054°34.5NORVENICH 3ZD1.6BAM14D3.5BAM098°FL150LIPMI13164°D11.4 BAMFL150D13 BAMBarmenD113.6 BAMN51 19.7E007 10.614.4 135°500023.6 1<strong>48</strong>°COLA 2ZCOL2ZFL150D12.9 BAM 1500015.9ELBALN51 09.4E007 26.8BETZON50 58.0E007 44.2600025.8 147°30 - 7Navtech - eddl07daorg01BRNAV EQPT required:DODEN 4Z: after D12.9 BAMDODEN 4Z 1(Flights REQ FL250and above)INITIAL CLIMB GPS/FMSDL058N51 21.3BarmenE006 54.8 D113.6 BAM052°5.22.410.1DL050N51 19.9E006 51.7098°Scale distortedColaD108.8 COLN50 47.0E007 35.7COM: Contact Langen RAD 133.775 when passing 2000ft.SPEED: MAX 250kt below FL100.ALT RESTRICTION: Climb to 5000 .At D3.5 BAM turn right - R212 BAM - NOR.RNAV: DL050 - DL058 - BAM - NOR.DODENN50 36.1E008 05.60 5 10 15 20nmBAM - R135 BAM - D12.9 BAM - 135° - BETZO - DODEN.RNAV: DL050 - DL058 - BAM - ELBAL - BETZO - DODEN.DODEN 4ZDODE4Z150DUS21SID Routeing AltitudesINITIAL CLIMB Climb on R054 DUS - at D6.4 DUS turn right - R278 BAM -follow SID.COLA 2ZAt D1.6 BAM turn right - R164 BAM - at D11.4 BAM turn D11.4 BAM/LIPMIleft - R328 COL - COL.MNM FL150RNAV: DL050 - DL058 - BAM - LIPMI - COL .NORVENICH 3ZFL250Change: GND freqTHIS CHART IS A PART OF NAVIGRAPH CHARTS AND IS INTENDED FOR FLIGHT SIMULATION USE ONLY2333023528D12.9 BAM/ELBALMNM FL150DODEN MNM FL250