Characterizing the astrometric errors in the Gaia catalogue Berry Holl
Characterizing the astrometric errors in the Gaia catalogue Berry Holl
Characterizing the astrometric errors in the Gaia catalogue Berry Holl
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
?015(+#%+,,5#+,$%.0%'B-.,+(%+2-#'3"-#$HipparchosTycho BraheFlamsteedLarge-angleastrometrymeridiancircles1 degree1 arcm<strong>in</strong>ute1 arcsecondB);23$,%@$((13*%@)(&$;3$(BesselSmall-angleastrometryHipparcos<strong>Gaia</strong>??1 milli-arcsecond1 micro-arcsecond150 BC 1500 1600 1700 1800 1900 2000 2100Year5?015(+#%+,,5#+,$%.0%'B-.,+(%+2-#'3"-#$HipparchosTycho BraheFlamsteedLarge-angleastrometrymeridiancircles1 degree1 arcm<strong>in</strong>ute1 arcsecondB);23$,%@$((13*%@)(&$;3$(BesselSmall-angleastrometryHipparcos<strong>Gaia</strong>??1 milli-arcsecond1 micro-arcsecond150 BC 1500 1600 1700 1800 1900 2000 2100Year6
./$%@2(&%51("31#1%"4%*/$%R)6J>%I1>%8PESSFTDDD%+*13+%1(&%*/$%R)6J>%I1>%8CUP#F%51)(*$&%7>%R13*)(%1(&%.1*V1(1%W$+JX617
:)55130"+%PDDD%06"+$+*%+*13+,%5"+)*)"(A%&)+*1(0$A%1(&%53"5$3%#"*)"(
<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Swedent 1,t 2,...,t 720...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...
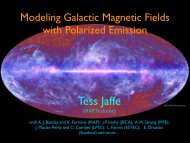
t 1,t 2,...,t 720...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...90K1)1%&23)(;%S%>$13%#)++)"(%43"#%@C,‣ "7+$3G)(;%P%7)66)"(%+"230$+%8#1;%YMCDFA‣ "(%1G$31;$%TC%*)#$+%87$*Z$$(%[DMC[DFA5 years mean: 88.0180 -18024020 0-90 45 sp<strong>in</strong>axisL<strong>in</strong>degren (2010) L<strong>in</strong>degren (2008)sun45°4 rev/day220200180160140120100path of sunover 4 months80path of sp<strong>in</strong> axisover 4 months&23)(;%S%>$13%#)++)"(%43"#%@C, ‣ "7+$3G)(;%P%7)66)"(%+"230$+%8#1;%YMCDFA G 13 G 13 ‣ "(%1G$31;$%TC%*)#$+%87$*Z$$(%[DMC[DFA G =5.7 90 240 5 years mean: 88.0 220 200180t 1,t 2,...,t 720...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...K1)1%180 -180-9060401601401201008060402001516
K1)1%&23)(;%S%>$13%#)++)"(%43"#%@C,‣ "7+$3G)(;%P%7)66)"(%+"230$+%8#1;%YMCDFA‣ "(%1G$31;$%TC%*)#$+%87$*Z$$(%[DMC[DFAZt 1,t 2,...,t 720µ rµ δµ α∗...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...δYαX‣ 5"+)*)"(+A%B+#+((+CA%1(&%53"5$3%#"*)"(%Z)*/%CD%\1+8]>3F%53$0)+)"(%1*%^_%PS%#1;A‣ 1+*3"#$*3)0%#"*)"(%"4%OQD`%"4%+"230$+%01(%7$%&$+03)7$&%2+)(;%*/)+%S%5131#$*$3%#"&$6H905 years mean: 88.0180 -180-9024022020018016014012010080604020017a7+$3G)(;%53"0$++,‣ 95513$(*%+"230$%#"*)"(%"(%*/$%+J>A‣ 53"51;1*)"(%"4%6);/*%*"%K1)1A18
objects and <strong>the</strong>ir characteristics. In pr<strong>in</strong>ciple <strong>the</strong> analy-each target us<strong>in</strong>g all <strong>the</strong> mission data <strong>in</strong> all <strong>the</strong> passbandsa7+$3G)(;%53"0$++,‣ 95513$(*%+"230$%#"*)"(%"(%*/$%+J>A‣ 53"51;1*)"(%"4%6);/*%*"%K1)1A‣ 9+*3"#$*3)0%bb=+%3$1&"2*A*>5)0166>%YUP%7)(($&%0"2(*)(;%53"'6$U%TCD%U%PD E %_%DE DF19a7+$3G)(;%53"0$++,‣ 95513$(*%+"230$%#"*)"(%"(%*/$%+J>A‣ 53"51;1*)"(%"4%6);/*%*"%K1)1A‣ 9+*3"#$*3)0%bb=+%3$1&"2*A*>5)0166>%YUP%7)(($&%0"2(*)(;%53"'6$U%TCD%U%PD E %_%DE DF360 M.B"3Z13&%#"&$66)(;,A. C. Perryman et al.: GAIA: Formation of <strong>the</strong> GalaxyObject modelInstrument calibrationstype ofobjectphotometryastrometryProperdirectionFieldanglesphotometricgeometricpo<strong>in</strong>tspreadfunctionPredictedCCD dataSatelliteorbit dataRelativisticmodelAttitudedata=)1;31#%43"#%c$33>#1(%$*%16H%8CDDPFObservedCCD dataFig. 8. Model of CCD data <strong>in</strong>terrelations for an astronomical object. In pr<strong>in</strong>ciple, <strong>the</strong> data analysis aims to provide <strong>the</strong> “best”representation of <strong>the</strong> observed data <strong>in</strong> terms of <strong>the</strong> object model, satellite attitude and <strong>in</strong>strument calibration. 20 Certa<strong>in</strong> data andmodels can, from <strong>the</strong> viewpo<strong>in</strong>t of <strong>the</strong> data analysis, be regarded as “given”; <strong>in</strong> <strong>the</strong> figure <strong>the</strong>se are represented by <strong>the</strong> satelliteorbit (<strong>in</strong> <strong>the</strong> barycentric reference system) and <strong>the</strong> relativistic model used to compute celestial directions. O<strong>the</strong>r model dataare adjusted to fit <strong>the</strong> observations (dashed l<strong>in</strong>es)
=!, ", #sceneparameters~LPSF/LSFmodel7/0convAGISimagesampl<strong>in</strong>g!Photo electrons!iterative parameter updateIntensity!sampledimage4x10 43x10 42x10 4 !1x10 4./0illum<strong>in</strong>ation historyhcomparison0 1 2 3 4 5 serial 6 7 8 9 10 11 12!Along-scan b<strong>in</strong>n<strong>in</strong>g pixel!D[{$k}]CDM ! modelled!"#$%&$'()*"+,-ccountsCDM parameters{Nk}observedcountsG3+1"%B+#+3"-"#%"2-.3+-.'0c3"&d/"##$%e%:"66%$*%16H%8CDPPFa7+$3G)(;%53"0$++,‣ 95513$(*%+"230$%#"*)"(%"(%*/$%+J>A‣ 53"51;1*)"(%"4%6);/*%*"%K1)1A‣ 9+*3"#$*3)0%bb=+%3$1&"2*A*>5)0166>%YUPC%1(&%7)(($&%%*"%YUPA*/$+$%5/"*"M$6$0*3"(%0"2(*+%13$%5/"*"(%(")+$%&"#)(1*$&%8c")++"(FH1!-$%*"&2&$'3('&4-560!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!t l → t 1 ,t 2 ,...,t 720w<strong>in</strong>dowstransmitted:23t 1,t 2,...,t 7209+*3"#$*3)0%+"62*)"(?+*)#1*$+%5131#$*$3+%"4%[%#"&$6+,‣ 8!F%!"230$%%%%%%%%%%S%U%PD E %5131#‣ 89F%9**)*2&$%%%%%%%%%%O%PD Q %5131#‣ 8bF%b16)731*)"(%%%%%%O%PD Y %5131#‣ 8KF%K6"716%%%%%%%%%%%%%%%f%PD C %5131#24
s i(α, δ) J2016t 1,t 2,...,t 720−→ µ∼g9+*3"#$*3)0%+"62*)"(?+*)#1*$+%5131#$*$3+%"4%[%#"&$6+,‣ 8!F%!"230$%%%%%%%%%%S%U%PD E %5131#‣ 89F%9**)*2&$%%%%%%%%%%O%PD Q %5131#‣ 8bF%b16)731*)"(%%%%%%O%PD Y %5131#‣ 8KF%K6"716%%%%%%%%%%%%%%%f%PD C %5131#a<strong>Gaia</strong> focal plane (106 CCDs)0.42 mdetectionand FOVdiscrim<strong>in</strong>ationWFS2BAM2BAM1SM1SM2AF1AF2AF3<strong>astrometric</strong>measurementsAF4AF5AF6AF7AF8c0.93 mBAM = basic angle monitor, WFS = wavefront sensorAF9WFS1photometry(dispersedimages)BPRPradial velocity(dispersedimages)RVS1ACRVS2RVS3AL25t 1,t 2,...,t 7209+*3"#$*3)0%+"62*)"(?+*)#1*$+%5131#$*$3+%"4%[%#"&$6+,‣ 8!F%!"230$%%%%%%%%%%S%U%PD E %5131#‣ 89F%9**)*2&$%%%%%%%%%%O%PD Q %5131#‣ 8bF%b16)731*)"(%%%%%%O%PD Y %5131#‣ 8KF%K6"716%%%%%%%%%%%%%%%f%PD C %5131#m<strong>in</strong>s, a, c, glsac gt l − f l ( , , , 2)σ l‣ @$1+*%+g213$+%+"62*)"(,PD PD% %5131#$*$3+%2+)(;%PD PC %"7+$3G1*)"(+A‣ &)3$0*%+"62*)"(%2(4$1+)76$%8h"#732(%$*%16H%CDPPFA‣ 2+$%9+*3"#$*3)0%K6"716%i*$31*)G$%!"62*)"(,%9Ki!%8@)(&$;3$(%$*%16H%CDPCF26
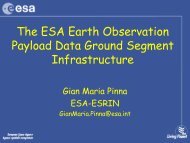
Hipparcos vs <strong>Gaia</strong> <strong>catalogue</strong>5 <strong>astrometric</strong> parameters‣ estimated values and <strong>the</strong>ir standard <strong>errors</strong>:00 h 00 m 00 s - 00 h 01 m 15 s 21 - 100αδµ α∗ µ δσ α σ δ σ σ µα ∗ σ µδall 10 comb<strong>in</strong>ationsCovariances27‣ Correlation between <strong>astrometric</strong>parameters of each star,Number Descriptor: epoch J1991.25 Position: epoch J1991.25 Par. Proper Motion Standard Errors Astrometric Correlations (%) SolnHIP RA Dec V ! (ICRS) " # µ !$ µ " !$ " # µ !$ µ " # # µ !$ µ !$ µ !$ µ " µ " µ " µ "" F1 F2!$ !$ " !$ " # !$ " # µh m s ±° % & mag deg deg mas mas/yr mas mas mas/yr !$ %1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 301 00 00 00.22 +01 05 20.4 9.10 H 0.000 911 85 + 01.089 013 32 3.54 – 5.20 – 1.88 1.32 0.74 1.39 1.36 0.81 +32 – 7 –11 –24 + 9 – 1 +10 – 1 + 1 +34 0 0.742 00 00 00.91 –19 29 55.8 9.27 G 0.003 797 37 – 19.498 837 45 + 21.90 181.21 – 0.93 1.28 0.70 3.10 1.74 0.92 +12 –14 –24 –29 + 1 +21 – 2 –19 –28 +14 2 1.453 00 00 01.20 +38 51 33.4 6.61 G 0.005 007 95 + 38.859 286 08 2.81 5.24 – 2.91 0.53 0.40 0.63 0.57 0.47 + 6 + 9 + 4 +43 – 1 – 6 + 3 +24 + 7 +21 0 –0.454 00 00 02.01 –51 53 36.8 8.06 H 0.008 381 70 – 51.893 546 12 7.75 62.85 0.16 0.53 0.59 0.97 0.65 0.65 –22 – 9 – 3 +24 +20 + 8 +18 + 8 –31 –18 0 –1.465 00 00 02.39 –40 35 28.4 8.55 H 0.009 965 34 – 40.591 224 40 2.87 2.53 9.07 0.64 0.61 1.11 0.67 0.74 +10 +24 + 6 +26 –10 +20 –16 –30 –19 + 6 0 –1.246 00 00 04.35 +03 56 47.4 12.31 G 0.018 141 44 + 03.946 488 93 18.80 226.29 – 12.84 4.03 2.18 4.99 6.15 3.20 +35 – 1 + 3 –11 – 2 +47 – 2 + 3 +31 +35 4 2.957 00 00 05.41 +20 02 11.8 9.64 G 0.022 548 91 + 20.036 602 16 17.74 – 208.12 – 200.79 1.01 0.79 1.30 1.13 0.82 +32 + 8 – 2 – 4 +12 + 6 +11 + 0 +16 +43 0 0.218 00 00 06.55 +25 53 11.3 9.05 3 H 0.027 291 60 + 25.886 474 45 5.17 19.09 – 5.66 1.70 0.93 1.95 1.54 0.88 +27 –66 –36 –38 –12 +36 –21 –24 +32 +18 0 0.989 00 00 08.48 +36 35 09.4 8.59 H 0.035 341 89 + 36.585 937 77 4.81 – 6.30 8.42 0.86 0.55 0.99 1.02 0.65 + 3 +16 – 1 + 0 + 7 – 2 + 8 + 4 +10 +13 3 –1.2610 00 00 08.70 –50 52 01.5 8.59 H 0.036 253 09 – 50.867 073 60 10.76 42.23 40.02 0.77 0.73 1.10 0.98 0.82 –13 –24 +11 + 1 – 7 + 6 + 0 –18 –22 –13 0 0.8211 00 00 08.95 +46 56 24.0 7.34 H 0.037 296 95 + 46.940 001 54 4.29 11.09 – 2.02 0.52 0.51 0.84 0.53 0.54 + 9 +20 +31 –30 + 0 –11 + 6 +21 +26 + 5 0 –0.2312 00 00 09.82 –35 57 36.8 8.43 H 0.040 917 56 – 35.960 224 82 4.06 – 5.99 – 0.10 0.81 0.58 1.16 1.02 0.72 +13 – 9 –17 –36 + 0 +16 – 1 –41 +29 + 2 2 0.7613 00 00 10.00 –22 35 40.9 8.80 H 0.041 679 70 – 22.594 680 60 3.49 8.45 – 10.07 1.21 0.67 1.48 1.44 0.59 +15 +23 +24 + 9 + 9 +24 – 5 –37 – 4 –10 0 –0.4614 00 00 11.59 –00 21 37.5 7.25 G 0.048 271 89 – 00.360 421 19 5.11 61.75 – 11.67 0.88 0.54 0.99 1.12 0.59 +34 + 1 –21 +23 – 3 +11 + 1 –24 +27 +40 0 –0.3115 00 00 12.07 +50 47 28.2 8.60 H 0.050 308 90 + 50.791 173 84 2.45 13.88 5.47 0.66 0.70 1.16 0.78 0.70 –27 + 8 +27 +22 + 5 + 9 + 6 – 6 +14 –19 0 0.35$16 00 00 12.34 –54 54 50.9 11.71 G 0.051 408 52 – 54.914 128 19 0.53 257.39 – 96.63 1.49 1.67 2.63 1.81 1.95 –27 – 7 –13 + 2 + 3 + 4 + 5 – 8 – 9 –22 0 0.76$17 00 00 12.26 –40 11 32.4 8.15 H 0.051 099 57 – 40.192 328 42 6.15 – 34.46 – 26.37 0.57 0.55 1.00 0.61 0.65 +18 +24 +13 +29 – 7 +11 –15 –35 –18 +11 0 –0.6218 00 00 12.75 –04 03 13.5 11.03 G 0.053 139 23 – 04.053 738 13 19.93 – 127.22 23.78 2.18 1.20 2.36 2.69 1.15 +24 +19 + 4 – 8 + 3 +15 + 3 –30 +26 +18 3 0.0519 00 00 12.80 +38 18 14.7 6.53 H 0.053 316 96 + 38.304 086 36 4.12 – 2.50 – 15.07 0.55 0.40 0.64 0.60 0.45 + 9 – 5 + 3 +53 – 8 –10 – 4 +21 + 8 +23 0 –0.8420 00 00 15.11 +23 31 45.4 8.51 G 0.062 950 50 + 23.529 283 97 10.76 36.00 – 22.98 0.88 0.59 1.06 0.92 0.59 +30 +39 +19 +10 + 2 + 8 + 9 – 5 +20 +32 0 0.50Hipparcos vs <strong>Gaia</strong> <strong>catalogue</strong>21 00 00 15.90 +08 00 26.0 7.55 H 0.066 235 69 + 08.007 234 37 5.84 61.89 – 0.22 0.84 0.51 0.95 0.84 0.56 +20 +13 – 9 –10 + 1 + 3 + 6 –16 +30 +36 2 2.0522 00 00 16.83 –49 21 08.2 8.69 H 0.070 135 93 – 49.352 266 86 4.47 – 7.90 0.46 0.63 0.79 1.15 0.71 0.93 – 6 – 1 –10 –16 –14 + 8 –12 –26 – 6 + 7 0 –0.4023 00 00 17.86 +13 18 44.0 7.57 G 0.074 429 30 + 13.312 210 83 12.21 54.15 9.65 0.90 0.52 0.95 0.91 0.55 +17 +10 +12 –23 +19 + 9 +15 – 1 +10 +36 0 0.3224 00 00 18.25 –23 27 09.9 9.05 H 0.076 049 79 – 23.452 749 13 9.73 127.15 22.22 1.00 0.61 1.21 1.21 0.55 + 3 –12 +21 –10 +12 +27 + 1 –37 – 2 –13 1 0.2425 H 00 00 19.05 –44 17 25.1 6.28 G 0.079 365 37 – 44.290 297 41 A 13.74 58.36 – 108.64 0.88 0.81 0.98 0.73 0.68 –32 +18 – 7 + 2 –14 + 2 –10 –25 +10 – 2 2 –0.5226 00 00 20.24 –13 23 35.9 9.13 H 0.084 345 79 – 13.393 296 86 9.19 – 103.33 – 33.35 1.00 0.83 1.34 1.42 0.75 +42 –13 –12 –12 –16 +33 –24 –55 +25 +31 0 –0.5627 00 00 20.51 –41 17 51.1 9.32 H 0.085 469 76 – 41.297 536 96 9.66 135.96 – 113.67 0.82 0.73 1.38 0.95 0.94 – 2 – 6 + 7 +19 – 3 + 6 – 4 –34 –15 – 4 2 –0.0728 00 00 20.94 –43 21 42.5 8.83 1997 H 0.087 248 71 – 43.361 799 62 5.64 – 10.96 – 8.69 0.71 0.60 1.05 0.83 0.782020+ 5 – 3 –11 +17 –15 +26 –14 –45 + 8 + 8 0 –0.7629 00 00 22.11 –49 06 28.6 9.14 H 0.092 131 06 – 49.107 955 05 2.85 26.86 4.05 0.75 0.92 1.40 0.79 1.09 – 9 –11 –18 –24 – 8 – 3 –11 –24 + 8 + 0 0 –0.2330 00 00 23.07 +42 08 29.4 8.26 H 0.096 135 63 + 42.141 498 82 3.79 – 8.44 – 10.14 0.53 0.53 0.88 0.72 0.54 + 7 +11 +26 – 9 – 5 –14 + 2 +14 +16 – 8 0 0.0331 00 00 23.54 +02 40 31.7 7.63 H 0.098 093 90 + 02.675 477 68 1.84 – 4.88 – 0.20 1.06 0.61 1.05 1.49 0.69 +19 +17 – 4 –33 +14 – 2 +22 +10 + 7 – 7 0 –0.0732 00 00 23.66 +51 56 22.2 9.09 H 0.098 583 75 + 51.939 490 50 3.10 – 0.39 – 1.38 0.78 0.74 1.29 0.94 0.79 –18 + 7 +18 + 4 + 8 + 8 + 8 + 2 +19 –12 2 0.6133 00 00 23.80 –10 27 44.8 8.10 H 0.099 180 83 – 10.462 454 45 8.94 – 3.62 28.71 0.90 0.48 1.09 1.39 0.47 +30 –31 – 6 –25 + 2 +33 –14 –38 +30 +23 0 0.2634 00 00 23.87 +26 55 05.7 6.43 H 0.099 469 73 + 26.918 238 21 12.71 42.20 – 53.47 0.61 0.43 0.74 0.64 0.43 +15 +32 +13 + 0 + 4 + 2 + 7 – 7 +15 + 9 0 1.9935 00 00 24.61 –14 29 25.7 9.07 H 0.102 560 52 – 14.490 480 72 5.96 162.25 – 1.47 1.13 0.69 1.45 1.66 0.62 +29 –34 –22 –22 – 7 +44 –14 –47 +26 +19 2 1.2536 00 00 24.79 +12 16 01.5 7.68 H 0.103 275 50 + 12.267 093 03 6.30 49.71 14.27 0.82 0.53 0.96 0.85 0.60 +26 +15 – 5 –12 + 3 – 1 + 7 –11 +23 +50 0 0.3437 H 00 00 25.28 –47 10 46.5 10.44 H 0.105 351 90 – 47.179 583 82 $ 3.74 – 6.92 7.03 3.67 2.50 2.72 2.23 2.14 +10 –14 – 8 –13 – 9 +12 – 9 –26 +11 – 4 2 –0.2438 00 00 26.65 –79 03 42.6 8.65 H 0.111 046 94 – 79.061 831 33 23.84 162.30 – 62.40 0.64 0.68 0.78 0.74 0.64 +10 – 4 –14 + 5 + 9 – 5 + 7 – 4 + 3 +13 0 –1.5639 00 00 26.85 –16 41 48.9 7.46 G 0.111 861 48 – 16.696 930 20 10.98 169.72 – 32.54 0.95 0.61 1.18 1.40 0.57 +30 – 2 – 2 –32 – 6 +17 –12 –47 +14 +11 2 –0.03$40 H 00 00 29.27 +67 13 00.4 10.61 2 G 0.121 969 71 + 67.216 791 25 A – 3.40 – 2.99 – 3.18 3.83 3.95 4.25 4.14 3.75 –11 – 9 +24 – 4 +12 +17 + 8 –21 +12 –10 7 1.79$41 00 00 27.98 +54 18 08.1 8.70 H 0.116 563 51 + 54.302 237 74 3.42 1.78 – 0.47 0.66 0.67 1.04 0.78 0.71 –24 +26 +13 +24 + 1 + 8 + 5 – 4 + 6 –15 0 –1.5342 00 00 30.09 +25 50 41.2 8.20 G 0.125 386 66 + 25.844 780 59 6.38 20.70 – 6.51 0.77 0.54 0.91 0.87 0.56 +13 +17 +11 + 7 – 7 –11 – 2 – 9 +19 + 7 0 0.3143 00 00 30.98 +59 33 35.1 6.18 H 0.129 089 00 + 59.559 737 86 7.63 – 80.60 – 24.07 0.42 0.45 0.60 0.56 0.49 –20 + 8 + 8 + 5 – 2 – 2 + 1 –15 +18 –16 2 0.9344 00 00 31.85 –03 18 22.9 7.91 H 0.132 722 30 – 03.306 361 74 2.41 11.10 16.04 1.11 0.50 1.01 1.37 0.51 +18 +15 – 3 –43 + 6 + 3 + 3 –26 +13 +20 0 1.4245 H 00 00 32.21 –72 12 09.8 9.59 H 0.134 204 53 – 72.202 710 31 A 15.10 – 37.20 – 2.78 1.82 1.68 1.92 1.95 1.64 + 5 +15 –14 + 8 +14 + 0 +14 + 6 + 0 + 8 1 0.9246 00 00 32.29 –25 37 20.1 8.57 H 0.134 544 29 – 25.622 252 77 1.19 15.17 – 13.39 0.99 0.58 1.20 1.34 0.57 + 7 – 9 – 9 –25 + 8 + 1 + 0 –45 +28 –19 0 1.2247 00 00 32.45 –56 50 06.9 10.78 G 0.135 192 36 – 56.835 247 73 24.45 – 44.21 – 145.90 1.29 1.35 1.97 1.49 1.57 –11 – 9 – 2 + 2 + 7 – 2 +10 –13 – 9 + 6 4 1.5848 00 00 32.45 –40 41 25.6 7.31 H 0.135 222 64 – 40.690 446 64 1.86 4.08 – 11.28 0.56 0.46 0.87 0.62 0.57 +11 +14 + 8 +38 – 6 +12 – 8 –33 – 5 + 9 2 –1.5949 00 00 33.48 +16 40 08.5 9.53 H 0.139 500 66 + 16.669 031 83 1.59 26.66 6.95 1.02 0.67 1.28 1.06 0.67 +40 + 6 + 8 + 5 + 7 + 8 + 7 + 1 +11 +46 0 –2.0850 H 00 00 34.29 –53 05 51.6 6.49 G 0.142 870 59 – 53.097 662 77 A 16.89 52.98 – 20.52 0.52 0.56 0.80 0.56 0.55 –30 –25 + 9 +17 +11 + 1 +12 – 7 –16 –32 1 –0.7251 00 00 34.41 +01 03 58.3 8.94 H 0.143 390 44 + 01.066 197 26 0.41 10.19 6.33 1.32 0.71 1.30 1.44 0.71 +19 – 5 –17 –41 +18 + 2 +13 – 2 +14 +24 0 –0.3752 00 00 35.20 –77 01 12.5 8.56 H 0.146 658 79 – 77.020 140 50 3.95 21.46 9.91 0.65 0.62 0.77 0.76 0.64 – 4 +14 –24 + 5 + 8 – 2 + 6 – 1 – 8 +10 0 1.2553 00 00 35.37 –29 15 48.2 10.96 H 0.147 390 23 – 29.263 382 47 – 1.76 11.94 – 12.96 2.18 1.03 2.45 3.15 1.27 + 3 – 7 + 7 +27 + 5 + 8 –10 –32 +11 –22 0 1.1954 00 00 36.40 +17 58 08.2 10.57 G 0.151 655 58 + 17.968 955 79 20.97 367.14 – 19.49 1.26 1.04 1.71 1.41 1.02 +40 – 1 – 2 – 3 –11 +17 –10 –22 +17 +42 0 0.6855 H 00 00 37.88 –66 40 59.2 7.40 G 0.157 833 23 – 66.683 103 36 A 14.66 162.88 – 28.82 0.86 0.85 0.98 0.82 0.82 –14 +12 –24 –16 + 7 – 8 + 3 + 8 –11 – 5 2 0.2456 00 00 39.08 +00 13 22.6 8.12 H 0.162 831 75 + 00.222 938 99 3.47 39.02 – 3.09 1.20 0.62 1.27 1.71 0.67 +11 +19 –24 –29 + 1 +23 + 7 –24 +29 +27 0 0.9157 00 00 40.39 –69 40 32.9 8.27 1 H 0.168 285 57 – 69.675 800 68 33.89 – 40.97 – 67.59 0.63 0.64 0.79 0.66 0.64 – 8 + 0 –29 –13 – 5 +11 – 1 –18 + 5 + 2 1 0.3158 00 00 41.70 +62 10 33.6 7.05 H 0.173 763 41 + 62.176 004 84 26.06 – 46.95 – 43.90 0.48 0.51 0.67 0.54 0.57 –17 +16 +18 +21 – 5 – 5 – 1 – 2 +24 –21 0 –1.0559 00 00 41.87 +55 43 20.9 9.09 H 0.174 447 49 + 55.722 462 67 – 0.06 – 0.27 – 1.02 0.85 0.85 1.38 1.16 0.98 –33 – 5 +19 –29 +21 +37 +14 –18 + 2 –25 1 1.9960 00 00 42.10 –64 27 57.0 8.34 H 0.175 423 18 – 64.465 825 16 6.18 1.75 10.74 0.63 0.60 0.83 0.70 0.63 – 6 – 3 –27 – 3 +11 – 1 +12 – 9 –17 + 3 0 0.0661 00 00 42.28 +53 49 19.9 8.86 H 0.176 157 26 + 53.822 186 25 5.60 32.68 – 16.70 0.64 0.68 1.11 0.89 0.82 –32 +19 +12 + 1 + 1 +12 – 1 + 1 – 2 –13 1 0.6762 00 00 43.19 –45 25 21.8 8.27 H 0.179 961 23 – 45.422 727 31 5.28 4.02 – 4.78 0.89 0.87 1.15 1.17 1.19 +24 + 8 –20 –11 –52 +12 –39 –71 +20 +45 1 1.7163 00 00 43.62 +45 15 12.0 6.36 1 H 0.181 749 50 + 45.253 333 05 4.81 17.38 0.22 0.41 0.43 0.71 0.43 0.44 + 8 + 6 +20 –14 – 5 –10 – 3 +16 +14 + 6 1 –0.2064 00 00 44.30 –27 54 27.2 8.08 H 0.184 588 93 – 27.907 546 14 3.45 – 5.93 – 14.59 0.88 0.48 0.94 1.22 0.51 + 3 – 3 + 9 +16 + 5 +22 – 7 –26 + 1 –23 0 –0.1065 00 00 45.11 –54 49 49.2 11.00 G 0.187 975 32 – 54.830 340 57 16.98 – 205.14 – 75.34 1.34 1.54 2.43 1.65 1.83 –25 – 7 –15 – 1 + 5 +13 + 8 – 4 –13 –27 1 1.985 booksof <strong>astrometric</strong> data~50,000 booksof <strong>astrometric</strong> data+ radial velocities up to ~17 mag66 00 00 45.25 –72 19 05.7 8.55 H 0.188 549 17 – 72.318 249 13 8.18 – 15.61 11.88 0.77 0.68 0.88 0.89 0.67 –11 +25 –19 +18 +11 – 1 + 9 –13 – 5 – 2 0 0.6467 00 00 47.78 +23 32 17.7 7.83 G 0.199 101 32 + 23.538 248 73 7.48 91.05 – 12.35 0.76 0.55 0.93 0.81 0.51 +28 +27 +11 +14 + 1 +12 + 5 –18 +15 +33 2 –1.3268 00 00 48.15 +16 59 20.3 8.79 H 0.200 636 28 + 16.988 964 99 31.80 – 99.69 – 315.90 0.94 0.63 1.17 1.14 0.82 +35 + 3 –12 +12 + 3 – 3 + 3 +14 – 7 +25 0 –0.6269 00 00 48.33 +30 23 45.2 8.33 H 0.201 371 75 + 30.395 892 83 6.35 16.48 – 1.30 0.97 0.58 1.12 1.37 0.61 – 2 +17 – 1 –29 +17 +28 +17 – 9 +24 + 4 0 0.2270 00 00 48.67 +36 46 39.5 10.42 H 0.202 800 14 + 36.777 639 45 B 5.25 – 46.78 – 0.88 19.36 13.02 13.87 16.42 11.24 + 4 +27 + 9 – 4 + 6 –18 +14 + 6 +19 + 4 17 2.5171 00 00 49.70 +36 46 48.6 8.26 H 0.207 099 81 + 36.780 153 28 A 9.13 – 24.50 – 19.47 2.11 1.35 1.84 2.05 1.40 – 1 +25 + 6 – 6 + 9 –15 +14 +15 +16 + 2 17 2.5172 00 00 52.67 –12 49 43.2 8.97 H 0.219 469 89 – 12.828 670 15 10.63 185.34 – 119.65 1.11 0.63 1.25 1.32 0.59 +26 –10 – 7 –41 – 9 +30 –13 –49 +30 +29283 0.9373 00 00 52.91 +66 50 52.7 6.90 H 0.220 457 19 + 66.847 966 87 3.97 – 20.78 18.19 0.53 0.51 0.69 0.67 0.55 –13 + 4 +23 + 8 – 2 –11 + 1 + 2 +17 –11 1 –0.3374 00 00 53.25 +35 45 09.8 9.93 H 0.221 872 81 + 35.752 722 13 24.22 157.73 – 40.31 1.12 0.82 1.36 1.53 0.94 +18 + 3 + 9 –12 + 1 +19 – 3 + 3 +15 +31 2 –1.4375 00 00 53.56 –50 26 47.3 7.42 H 0.223 162 16 – 50.446 465 00 1.60 29.01 2.56 0.55 0.53 0.79 0.69 0.59 – 8 + 0 – 9 – 3 –11 + 2 – 9 – 7 – 5 – 1 0 1.2076 00 00 54.77 +32 49 32.4 9.03 2 H 0.228 219 59 + 32.825 674 52 2.29 – 1.98 – 8.45 1.02 0.67 1.19 1.17 0.71 + 7 +12 – 4 +40 + 3 –25 + 6 +19 + 8 +14 4 –0.3177 00 00 55.33 –30 03 51.0 8.41 G 0.230 521 69 – 30.064 173 33 3.53 18.83 2.83 0.90 0.49 1.12 1.24 0.61 + 4 –21 + 3 –11 + 7 +31 + 0 –39 – 1 –15 1 1.3078 00 00 55.76 +17 52 04.2 8.06 H 0.232 313 07 + 17.867 841 93 1.17 – 0.51 3.68 0.72 0.56 0.96 0.81 0.54 +41 +13 +10 +10 + 6 + 6 + 5 – 4 + 1 +41 0 1.0979 00 00 56.57 +35 19 00.3 8.69 H 0.235 722 86 + 35.316 753 86 4.57 16.45 – 13.81 0.87 0.56 0.99 1.06 0.62 +10 + 2 + 2 –16 – 2 +14 – 4 + 7 +23 +22 0 –0.28
Introduction to astrometry & <strong>Gaia</strong>Importance of error characterizationResults of my workTerm<strong>in</strong>ologyxis a measured or derived quantity (e.g. parallax of a star):erroruncerta<strong>in</strong>tye = x − x trueRandom variability <strong>in</strong> measurement.unknown~knownDescribed by probability distributioncharacterized by e.g. mean, standard deviation, skewness etc.Often confus<strong>in</strong>gly called ‘error’, ‘mean error’or (slighly better) ‘standard error’, ‘RMS error’, etc.I will use ‘standard uncerta<strong>in</strong>ty’for <strong>the</strong> uncerta<strong>in</strong>ty of a Gaussian error distribution,Observations are often <strong>in</strong>fluenced by many random processesapproach<strong>in</strong>g Gaussian error distribution (central limit <strong>the</strong>orem).30
Term<strong>in</strong>ologyxis a measured or derived quantity (e.g. parallax of a star):erroruncerta<strong>in</strong>tye = x − x trueRandom variability <strong>in</strong> measurement.unknown~knownDescribed by probability distributioncharacterized by e.g. mean, standard deviation, skewness etc.Normally estimated quite well:- by repeat<strong>in</strong>g (assum<strong>in</strong>g identical experiments),- observation process knowledge (e.g. photons Poisson statistics).biasNonzero mean <strong>in</strong> probability distribution.often unknownIf assumed zero leads to systematic <strong>errors</strong>.These are difficult to determ<strong>in</strong>e by repeat<strong>in</strong>g <strong>the</strong> experiment(e.g. observ<strong>in</strong>g Castor while you should be observ<strong>in</strong>g Pollux)31Why we need to understand <strong>errors</strong>Essential for <strong>in</strong>terpret<strong>in</strong>g data, examples:proper motion of stars <strong>in</strong> clusterData po<strong>in</strong>ts + standard uncerta<strong>in</strong>tyDeterm<strong>in</strong>e membershipy = µ i− exclud<strong>in</strong>g iσ diffOutcome does not critically depend onuncerta<strong>in</strong>ty (e.g. +/- 10% does not change result)valueCompute velocity dispersion (excl. 4)1 2 3 4 5 6 7 8 9 10data po<strong>in</strong>tσ 2 computed = σ2 <strong>in</strong>tr<strong>in</strong>sic + σ2 dataIf <strong>the</strong> latter two are of similar size, <strong>the</strong> datauncerta<strong>in</strong>ties need to be very well known.Depend<strong>in</strong>g on <strong>the</strong> application uncerta<strong>in</strong>ties can be of crucial importance!32
150uncorrelated1+,correlation coefficient 0.814014,13013,Parallax p 2 [μas]12011010090807060σ = 10σ = 105050 60 70 80 90 100 110 120 130 140 150 1Parallax p 1 [μas]!"#"$$"%&' ! &&(")* 212,11,1,,0,/,.,-,σ = 10σ = 10+,+, -, ., /, 0, 1,, 11, 12, 13, 14, 1+, 1!"#"$$"%&' " &&(")*706050403020σ = 14.1difference = 2 − 110Difference p2 - p1 [μas]0−10−20−30−40−50−60−70σ =7.170 80 90 100 110 120 130Mean value (p 1 + p 2 )/2 [μas]mean = ( 1 + 2 )/2 233706050403020Difference p2 - p1 [μas]10σ =6.3difference = 2 − 10−10−20−30−40−50−60−70σ =9.570 80 90 100 110 120 130Mean value (p 1 + p 2 )/2 [μas]mean = ( 1 + 2 )/2Introduction to astrometry & <strong>Gaia</strong>Importance of error characterizationResults of my work
<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012H5"2-.'02<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>*%+,4%,$!&4%',($$%$",2$%2!8!#(,)&,#.(,!"#$%'(#$)-,"%:;#)%&?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2010, 2011, 2012a, 2012b)*%+,-!&,#.(,-%/!$)!&-(,0(#+((&,!&1,2!)$,%3,!"#$%'(#$)-,2!$!'(#($",0(,("#)'!#(4?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2012a, 2012b)5.!#,)",#.(,)'2!-#,%3,667,$!4)!#)%&,4!'!8(,%&,9!)!,!"#$%'(#$1?Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden‣ Prodʼhomme & <strong>Holl</strong> et al. (2011), <strong>Holl</strong> & Prodʼhomme et al. (2012)
<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012H5"2-.'02<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>*%+,4%,$!&4%',($$%$",2$%2!8!#(,)&,#.(,!"#$%'(#$)-,"%:;#)%&?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2010, 2011, 2012a, 2012b)*%+,-!&,#.(,-%/!$)!&-(,0(#+((&,!&1,2!)$,%3,!"#$%'(#$)-,2!$!'(#($",0(,("#)'!#(4?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2012a, 2012b)5.!#,)",#.(,)'2!-#,%3,667,$!4)!#)%&,4!'!8(,%&,9!)!,!"#$%'(#$1?Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden‣ Prodʼhomme & <strong>Holl</strong> et al. (2011), <strong>Holl</strong> & Prodʼhomme et al. (2012)Random <strong>errors</strong> <strong>in</strong> <strong>Gaia</strong> <strong>catalogue</strong>Measurement process <strong>in</strong>cludes effects like:‣ diffraction of light through telescope,‣ effective <strong>in</strong>tegration time,‣ motion of <strong>the</strong> satellite dur<strong>in</strong>g <strong>in</strong>tegration,‣ CCD readout noise,‣ CCD charge transfer <strong>in</strong>efficiencies (due to radiation damage).Random variability is dom<strong>in</strong>ated by photon fluctuations:‣ raw photo-electron accurately follow Poisson statistics,‣ so measurements are (largely) unbiassed and uncorrelated,‣ number of electrons per pixel is >>10 (even for G=20)it is similar to a Gaussian distribution sampled at discrete po<strong>in</strong>ts.In absence of radiation damage:‣ <strong>the</strong> observation times estimated by <strong>the</strong> centroid<strong>in</strong>g processwill also be Gaussian, unbiassed, and uncorrelated,‣ <strong>the</strong>refore, to characterize <strong>astrometric</strong> <strong>errors</strong>we only need to study error propagation through AGIS!38 20
9+*3"#$*3)0%$33"3+‣ 8!F%!"230$%%%%%%%%%%S%U%PD E %5131#‣ $10/%5131#$*$3%$33"3%01(%7$%&$0"#5"+$&%)(*"%0"(*3)72*)"(+%43"#%$+*)#1*$&%#"&$6+,e :e = e s + e a + e c + e gt 1,t 2,...,t 720e s...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...e ae ce ge !"e S %&e A$'$"$"$":"66%$*%16%CDPP#!"#%&39$#'e ::"66%$*%16%CDPDt 1,t 2,...,t 720!*!*!*!*!*"#$%&'#()*+',-./0basic angle angle 106.5 106.5 ◦9+*3"#$*3)0%$33"3+‣ 8!F%!"230$%%%%%%%%%%S%U%PD E %5131#attitude error‣ $10/%5131#$*$3%$33"3%01(%7$%&$0"#5"+$&%)(*"%0"(*3)72*)"(+%43"#%$+*)#1*$&%#"&$6+, timee = e s + e a + e c + e ge s...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...e a!* !! ** !*!* !*e ce ge !"e S %&e A$'$"$"$":"66%$*%16%CDPP#!"#%&40$#'
0.0075 0.0125CorrelationCorrelationCorrelation-0.0050 0.00000.05δ,µ δ0.03 0.050.05-0.00750.5 deg b<strong>in</strong>ned spatial correlations (49 datasets)0.04 -0.00250.040.040.01500.02-0.01000.030.030.03-0.00500.01250.020.010.020.02-0.0125 -0.00750.5 deg b<strong>in</strong>ned spatial correlations (112 datasets)0.01000.010.010.0150-0.01500.000.000.00-0.01000.000.000.007502.5 5.010 5.0 7.57.5 10.020 10.0 3012.5 15.040 15.0 0.017.5 50 17.5 20.0 2.5 20.060 2.570 5.0 5.0 80 7.5 90 10.0 10.0 100 12.5 15.0 12.5 110 17.5 120 15.0 20.0130 17.5 14020.0150 160 170 1800.0125SeparationSeparation [deg][deg][deg]Separation [deg]Separation [deg] [deg]AlphaStar Delta Parallax MuAlphaStar MuDelta-0.0125 AlphaStar Delta Parallax MuAlphaStar MuDeltaAlphaStar Delta Parallax MuAlphaStar MuDeltaAlphaStar Delta Parallax MuAlphaStar MuDeltaAlphaStar Delta Parallax MuAlphaStar MuDelta corr. estimate (from FOV overlap)0.0050 0.0100AlphaStar Delta Parallax MuAlphaStar MuDelta:"66%$*%16%CDPD AlphaStar Delta Parallax MuAlphaStar MuDelta corr. estimate (from FOV overlap)-0.01500.5 1.0 deg b<strong>in</strong>ned spatial correlations (759 datasets)1.0 deg b<strong>in</strong>ned spatial correlations (759 (25 datasets) 1.0 deg b<strong>in</strong>ned spatial correlations (759 (17 datasets)0.00250.100.100.100.00750 10 20 30 40 50FOV = 13 ◦ 60 70 80 90 100 110FOV = 13 ◦ 120 130 140 150 160 170 180FOV = 13 ◦0.090.09Separation [deg]0.090.0000 #stars/FOV = 12 #stars/FOV = 36 #stars/FOV =1200.0050Correlation0.0050 0.01000.5 1.0 deg b<strong>in</strong>ned spatial correlations (759 datasets)0.5 1.0 deg b<strong>in</strong>ned spatial correlations (112 (759 datasets)1.0 0.5 deg b<strong>in</strong>ned spatial correlations (759 (49 datasets)0.100.100.100.0025 0.00750.090.0000 0.00500.08-0.00250.070.00250.060.08-0.00250.07 0.00250.06-0.0050 0.00000.05-0.0075 -0.00250.04-0.01000.03-0.00500.02-0.0125 -0.00750.01δ,µ δ-0.0150 -0.0100α,µ α , πα,µ α , π0.06FOV = 13 ◦#stars/FOV = 120.05Correlation0.070.04CorrelationCorrelation0.090.080.070.06AlphaStar Delta Parallax MuAlphaStar MuDelta corr. estimate (from FOV overlap)AlphaStar Delta Parallax MuAlphaStar MuDelta0.080.080.070.060.060.05more stars per 0.05 FOV0.040.030.020.01FOV = 7 ◦ FOV = 4 ◦0.09#stars/FOV = 12 #stars/FOV = 12smaller FOV0.000.000.000.0 0 2.5 10 5.0 7.5 20 10.0 30 12.540 15.0 50 17.5 20.060 2.570 5.0 80 7.5 90 10.0 100 12.5 15.0 110 17.5 120 20.0130 2.5 140 5.0 7.5 150 10.0 160 12.5170 15.0 18017.5 20.0Separation [deg]Separation [deg]Separation [deg]:"66%$*%16%CDPD Separation [deg]-0.012541AlphaStar Delta Parallax AlphaStar MuAlphaStar Delta Parallax MuDelta MuAlphaStar corr. AlphaStar MuDeltaAlphaStar Delta Parallax estimate (from Delta FOV Parallax overlap) MuAlphaStar MuAlphaStar MuDelta MuDeltaAlphaStar Delta Parallax corr. AlphaStar estimate (from Delta FOV Parallax overlap) MuAlphaStar MuAlphaStar MuDelta MuDelta corr. estimate (from FOV overlap)AlphaStar Delta Parallax MuAlphaStar MuDelta-0.01500 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180Separation [deg]Correlation0.080.070.060.070.040.030.020.01AlphaStar Delta Parallax MuAlphaStar MuDeltaCorrelation0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0AlphaStar Delta Parallax MuAlphaStar MuDelta corr. estimate (from FOV overlap)<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012H5"2-.'02<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>*%+,4%,$!&4%',($$%$",2$%2!8!#(,)&,#.(,!"#$%'(#$)-,"%:;#)%&?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2010, 2011, 2012a, 2012b)*%+,-!&,#.(,-%/!$)!&-(,0(#+((&,!&1,2!)$,%3,!"#$%'(#$)-,2!$!'(#($",0(,("#)'!#(4?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2012a, 2012b)5.!#,)",#.(,)'2!-#,%3,667,$!4)!#)%&,4!'!8(,%&,9!)!,!"#$%'(#$1?Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden‣ Prodʼhomme & <strong>Holl</strong> et al. (2011), <strong>Holl</strong> & Prodʼhomme et al. (2012)
It is well known that, under <strong>the</strong> given assumptions, <strong>the</strong> leastsquaresabsence Theestimatecomplete of ˆx = attitude (Mcovariance M) −1 <strong>errors</strong> M h ismatrix (i.e., unbiased, for forand V <strong>the</strong>that = least 0). its covariancematrix given by (M M) −1 . S<strong>in</strong>ce objective this Eq. (12) it is clear that R is responsibThe squares second which problem is term 0 if nofisobservation V = Now Qof −1 con sou +<strong>the</strong>n Eq. (8) <strong>the</strong>iscontribution C = N −1 , which due tocan <strong>the</strong>be uncerta<strong>in</strong>ty written asof <strong>the</strong> attitude (s<strong>in</strong>cehappen,Q −1 forR paper is to characterise <strong>the</strong> <strong>astrometric</strong> solution <strong>in</strong> terms of its source and attitude parameters. Bec<strong>in</strong> reality V > 0). Part of <strong>the</strong> problem is <strong>the</strong>reforecovariance matrix, we need to concentrate on <strong>the</strong> normal matrix served to quite estimatet<strong>in</strong>uous spl<strong>in</strong> <strong>in</strong>frequently, <strong>the</strong> matrixN = MV. MBy andpermutation its <strong>in</strong>verse. Theofbasic <strong>the</strong> sub-matrices,problem is that <strong>the</strong>se<strong>the</strong> follow<strong>in</strong>gmatricesalternativezero for anyU W P R −1Q −1 R Covariance expressions are so large that are it is obta<strong>in</strong>ed: expansion C ≡not feasible to calculatemodel <strong>Holl</strong> & L<strong>in</strong>degren (2012)W =V R , (13) Q −1 R <strong>the</strong> Q<strong>in</strong>versetimedirectly. From Eq. (5) we have3.2. s 1 sRank 2 s 3deficiency s −−−−−−→4of <strong>the</strong> normala 1 ... a m⎡sS 11 S 10 ··· 0 S 1 A ⎤U = ≡ V (0) U +( iP − RQ 1−1 R −1us<strong>in</strong>g <strong>the</strong> same block partition as <strong>in</strong> <strong>the</strong> normal , matrix Thanks ofto Eq. <strong>the</strong>0 S s (17) (9), scann<strong>in</strong>g law which of <strong>Gaia</strong> suc2an important 2 S difference 2 ··· 0 be<strong>in</strong>g S 2 A sources and attitude parametrisation2 <strong>in</strong>verse. s 3N = . . ... P R nal sub-matrices P and Q are posiB. <strong>Holl</strong> & L. V L<strong>in</strong>degren: = Q −1 that. . Error + Q −1 <strong>the</strong>characterization R covarianceURQ −1 matrix is not so that The<strong>in</strong>termthisparse, but typically full. Block U=gives uss 40 0 ··· S nS n S R , <strong>the</strong>,(9) ofcovariances <strong>the</strong> <strong>Gaia</strong> <strong>astrometric</strong>Qnormal matrix of(18)<strong>the</strong>solution. is howevera large Is<strong>in</strong>gular,numbh<strong>astrometric</strong> parameters W = of −URQ alln A n<strong>the</strong> −1 sources, . V conta<strong>in</strong>s space<strong>the</strong> duecovari-ances of <strong>the</strong> attitude parameters, and W <strong>the</strong> cross-covariances<strong>the</strong>to(19)<strong>the</strong> (<strong>in</strong>ternally) tion ofundefia U s<strong>in</strong>g(03.3. Series expansion of <strong>the</strong> covariance matrixon. A correspond<strong>in</strong>g ⎢⎣A 1 S 1 A 2 S 2 ··· A nS ni A i A ⎥⎦<strong>the</strong> referenceexpansionsystem canwhichbe made<strong>in</strong>verse<strong>the</strong> nextVter (0The complete covariance matrix for <strong>the</strong> least squares problemiof V = Q −1 eters + are expressed. This means thaEq. (8) is C = where N −1 Here,betweenV allows<strong>the</strong> sourcea similarand attitude<strong>in</strong>terpretation:parameters.<strong>the</strong> firstWe areterm,ma<strong>in</strong>ly<strong>the</strong> l<strong>in</strong>es divide N <strong>in</strong>to <strong>the</strong> sub-matrices P, R, and Q, <strong>the</strong> and that Q, which can be written as−1 <strong>the</strong> ,<strong>in</strong>terestedU,<strong>the</strong> computaisnormal <strong>the</strong> equations havestructures covariance of which are ofalthoughoutl<strong>in</strong>ed <strong>the</strong> attitudefor somebelow. <strong>errors</strong>purposesobta<strong>in</strong>edVbymayfitt<strong>in</strong>gQ −1 alsoNotwithstand<strong>in</strong>g R Pbe <strong>the</strong> −1 RQ required−1 + Uattitudethis where(1)predicament, jkfor evertInmodel (e.g.,<strong>the</strong> follow<strong>in</strong>g towe use <strong>in</strong>dices i, j, and k (rang<strong>in</strong>g from 1 solved by iteration, as is done <strong>in</strong> AUtogetW<strong>the</strong> <strong>the</strong>noisy covariances P Robservations, −1for secondaryus<strong>in</strong>g error-freesources, Q −1 Rsource which P −1 RQdepend−1 R P −1 RQerations −1 + appparametersto N) to denote <strong>the</strong> different primary sources, while p, q, and r tive action needed is to modify <strong>the</strong> nonC ≡<strong>the</strong> (i.e.,attitudeare reservedW for for = UparametersV<strong>the</strong> different R = 0). , Thebutsecond i(G$3+$%)(4$1+)76$j%8h"#732(%$*%16H%CDPDFdo notterm (13)contributeis <strong>the</strong> Qcontribution to −1 R<strong>the</strong> P −1 estimation RQ −1 R P −1 RQEq. −1 R(27). P −1 RQ Toattitude parameters (<strong>in</strong> <strong>the</strong> range converged solution,from−Qthrough a rigid-b<strong>the</strong>of <strong>the</strong>uncerta<strong>in</strong>tyattitude).≡ V (0)from 1 to P) and l for <strong>the</strong> observations. As before, l ∈ i means an <strong>the</strong> + V (externally (1) + V (2) + def<strong>in</strong>ed) V (3) +simplificatioof <strong>the</strong> source parameters. Insert<strong>in</strong>g Eq. (18) <strong>in</strong>to ··· reference fraus<strong>in</strong>g <strong>the</strong> same observation block (14) Assum<strong>in</strong>gpartition and of source expand<strong>in</strong>g that <strong>the</strong>as i, <strong>the</strong> butnormal werecursively <strong>in</strong>verses exist,nowmatrix <strong>in</strong>troduce ofgives<strong>the</strong> follow<strong>in</strong>galso l ∈ p for an Sect. identities 6.1). However, areEq. (9), <strong>in</strong> which successive terms canevenbe similarlywithout<strong>in</strong>sobservationeasilydepend<strong>in</strong>g verifiedon bya directp (<strong>the</strong> attitudesubstitution:parameter with <strong>in</strong>dex sible to produce a pseudo-solution X is a matrixan important difference be<strong>in</strong>g that <strong>the</strong> covariance matrix is not The terms <strong>in</strong> Eqs. (20) and (21)p), that is an observation for which ∂ f l /∂a p 0. Similarly, l ∈ AGIS solution with <strong>the</strong>4. follow <strong>the</strong><strong>in</strong>itial catalosparse, but typically U full. = Block P −1 + U gives us <strong>the</strong> covariances of <strong>the</strong>block Theisk<strong>in</strong>i ∩ p <strong>in</strong>dicates an observation of source i depend<strong>in</strong>g on a p , and <strong>the</strong> iterations. This projects <strong>the</strong> solut<strong>astrometric</strong> parameters of all <strong>the</strong> sources, V conta<strong>in</strong>s <strong>the</strong> covariancesof <strong>the</strong> attitude parameters,U (0) = P −1 ; U (α) = XU (α−1) , αl ∈ p ∩ q an observation depend<strong>in</strong>g on both a p and a q ; f<strong>in</strong>ally, to <strong>the</strong> <strong>in</strong>itial values) <strong>in</strong>to <strong>the</strong> orthogoP −1 RQ −1 andR WP U −1 =<strong>the</strong>+P −1 + P −1 RVR P −1 , (14) 4.1. Assumcross-covariances Vp ∈ i means that <strong>the</strong>re is at least one observation of source i space.(0) = Q −1 ; V (α) = YV (α−1) , αbetween <strong>the</strong> source and attitude P −1 RQ parameters. −1 R PV −1 We = RQ are Q −1 −R ma<strong>in</strong>ly RP −1 P −1 <strong>in</strong>terested<strong>in</strong> U, although depend<strong>in</strong>g for onsome a p . With purposes this slight V may abuse alsoofbe <strong>in</strong>dices required and notations where For <strong>the</strong> characterisation of <strong>the</strong> (e.g., to get <strong>the</strong> from covariances set <strong>the</strong>ory P −1 for weRQ secondary can −1 write R P<strong>the</strong> sources, −1 relevant RQ −1 which+ R −1, (15) The attitudeRsums P −1 depend <strong>in</strong> RQ a concise −1 R Pway−1 + ···strument The corresp asW = −P −1 RV . ciple desirable (16) to use C = N † , <strong>the</strong> pson <strong>the</strong> attitude which parameters is quitebut easy dotonot <strong>in</strong>terpret, contribute keep<strong>in</strong>g to <strong>the</strong><strong>in</strong> estimation m<strong>in</strong>d that i always≡ U (0) + U (1) + U (2) + U (3) matrix. This means X = P −1 modelledthat RQC −1 does R by+ ··· (20), notof <strong>the</strong> attitude).refers to a source, p to an attitude parameter, and so on. (See <strong>the</strong> reference frame itself. spl<strong>in</strong>es Indeed, on<strong>the</strong>aAppendix Equation A for more (14) precise has def<strong>in</strong>itions.) a very simple and clear <strong>in</strong>terpretation. larger than <strong>the</strong> The Ypositional= Q −1 arationsR uncerta<strong>in</strong>tiP −1 R .ofAssum<strong>in</strong>g that !)k$%*$%_%2**$36>%)#5310*)0176$j% block-diagonalidentities arematrix of43due to <strong>the</strong> scarcity and fa<strong>in</strong>tness of eeasily verifiedsizeby5Ndirect first term,× 5N,substitution: Pterms −1 , is <strong>the</strong> have covariance a clear physical of <strong>the</strong> source <strong>in</strong>terpretationX is a matrix parameters <strong>in</strong>consist<strong>in</strong>g <strong>in</strong> terms <strong>the</strong> of N × of N blocks <strong>the</strong> non-<strong>in</strong> of siof with blocks P i size 5 × 5 (<strong>the</strong> number of <strong>astrometric</strong>parameters per source) along <strong>the</strong> ma<strong>in</strong> diagonal. Fromabsence <strong>the</strong> propagation of attitude of <strong>errors</strong> <strong>the</strong> (i.e., observational for V = <strong>errors</strong> 0). block The isalternately secondfor l<strong>in</strong>k<strong>in</strong>gtermwith from<strong>the</strong> VLBI frame (BisNow con<strong>the</strong> attitudeo<strong>the</strong>r hand, s<strong>in</strong>ce <strong>Gaia</strong> will <strong>in</strong> effectEqs. (6) <strong>the</strong>n U and =sources <strong>the</strong> P(9) −1 we + contribution Pf<strong>in</strong>d−1 toRVR <strong>the</strong> attitude,P −1 due , toand <strong>the</strong> uncerta<strong>in</strong>ty from(14)<strong>the</strong> attitude of <strong>the</strong>to Xframeattitude <strong>the</strong> ijsources. = P −1for <strong>the</strong>(s<strong>in</strong>cehappen,i Rforeseeable ip (Q −1 )for<strong>in</strong>g <strong>the</strong> future, AL pq (RthaFor <strong>in</strong> reality example, ∂ f l ∂ fbitrary and irrelevant for most purpoV = V > U (0) 0).Q − R P −1 lPR p ∈ i q ∈ j−1isPart <strong>the</strong> covariance of <strong>the</strong> problem of <strong>the</strong>issource <strong>the</strong>refore parameters to estimate due t<strong>in</strong>uous spl<strong>in</strong>and two desto V. <strong>the</strong> By observation permutation i = noise of ,<strong>the</strong>but sub-matrices,∂sl ∈ i i ∂s w l , with perfect (15)<strong>the</strong> The attitude; follow<strong>in</strong>g (10) correspond<strong>in</strong>g <strong>in</strong>clude U (1) alternative <strong>the</strong> it expression <strong>in</strong>addi-tional W = −P −1 RV .C, whichzero for impliesfor<strong>the</strong> (scalar us<strong>in</strong>ganydirection ofCovariance iexpressions uncerta<strong>in</strong>ty are obta<strong>in</strong>ed: expansion from <strong>the</strong> attitude model (16) <strong>errors</strong> due<strong>Holl</strong> to <strong>the</strong> characterise & L<strong>in</strong>degren noisy obser-w l = σ −2 but<strong>the</strong>(2012)frame<strong>errors</strong> separat<strong>in</strong> <strong>the</strong>wherevationslis <strong>the</strong> assum<strong>in</strong>g weight of true observation source l. Provided parameters; that <strong>the</strong> U (2) s<strong>the</strong>Although Ys pq additional s=s <strong>the</strong> (Q −−−−−−→−1 s<strong>in</strong>gularity ) pr (Rof ir ) N P − time1 2 3 4U ( a 1 ... a m 2011), andfEquation (14) source has is a very sufficiently simpleobserved and clear (which <strong>in</strong>terpretation. is a condition Thefor primary ries expansionruncerta<strong>in</strong>ty due to <strong>the</strong> source <strong>errors</strong> obta<strong>in</strong>ed with s of <strong>the</strong> i<strong>in</strong>verse ∈ r ∩ q1 perfect attitudePcovariance i propagat<strong>in</strong>g positiveof def<strong>in</strong>ite, <strong>the</strong>through source U and = iderivfirst term, P −1 sources) , isI.0"3+-'1#+B*.,%+BB#'C.3+-.'0<strong>the</strong> so parameters Pis <strong>the</strong> −P. RQ attitude Because −1 <strong>in</strong>R <strong>the</strong> −1of back <strong>the</strong> , blockdiagonal<strong>errors</strong> structure (i.e., of forP V its= <strong>in</strong>verse 0). The is second also block-diagonal term is withto conjecture is that <strong>the</strong> expansion conabsence of attitudeNow <strong>the</strong>s sources; consider ful approximation <strong>the</strong> and (17)case sothat of QC. −1 2 2AlternatiInisorder a fulltomPractical<strong>the</strong>n <strong>the</strong> contribution P −1 l$5610$+%71(&M&)1;"(16%+*320*23$%"4%m%<strong>in</strong>verseialongdue <strong>the</strong>todiagonal; uncerta<strong>in</strong>ty thus PV −1 of = is<strong>the</strong> Qtrivially −1 attitude + Qcomputed.−1 (s<strong>in</strong>ce R URQhappen, −1 so that <strong>in</strong> thisfor it may example, be necessary if <strong>the</strong> attitude to project is modellB. <strong>Holl</strong> & L. L<strong>in</strong>degren: Error characterization, of <strong>the</strong> 3<strong>Gaia</strong> <strong>astrometric</strong> (18) solution. <strong>the</strong> r<strong>in</strong> reality V > 0). The7>%1%&)1;"(16%+*320*23$,%Part structure of <strong>the</strong>ofproblem P × Pismatrix <strong>the</strong>refore Q depends to estimate on <strong>the</strong> attitude t<strong>in</strong>uous spl<strong>in</strong>e <strong>the</strong> orthogonal over <strong>the</strong> whole complement mission).a large I numbs of <strong>the</strong> Then nV. Bymodel:permutation parametrisation $n0)$(*6>%0"#52*$%+)(;6$%$6$#$(*+A%6of <strong>the</strong> sub-matrices, used (see Sect. <strong>the</strong>W 44) follow<strong>in</strong>g= but −URQ is typically alternative−1 . band-diagonal. zero for any hascomb<strong>in</strong>ation almost negligible (19) of i and tionimpact j. of From a s<strong>in</strong>gon <strong>the</strong> Eq3.3. Series expansion of <strong>the</strong> covariance matrixon. A correspond<strong>in</strong>g expansionexpressions are Theobta<strong>in</strong>ed:general "3%1(>%+*1*)+*)0%4"3%1(>%;)G$(%o10"7)1(jexpression for <strong>the</strong> matrix element islarge number of parameters. UltimatU proximation (α) <strong>in</strong>verse<strong>the</strong> cannextbe madeterThe complete covariance matrix for <strong>the</strong> least squares problem ofwill be ascerta<strong>in</strong>ed by∂ f l ∂ f lQ pq =w l , (11) reported <strong>in</strong> Paper II. For <strong>the</strong> subsequU = V = Q ik= X ij U (α−1)jk⇒ U (1)ik=Here, V allows a similar <strong>in</strong>terpretation: <strong>the</strong> first −1 +term, Q −1 <strong>the</strong> computaP − RQ −1 R −1j, is <strong>the</strong>Eq. (8) is C = N −1 , which can be written ascovariance of <strong>the</strong> attitude ∂al ∈p ∩ ,q p ∂a<strong>errors</strong> q obta<strong>in</strong>ed (17) by fitt<strong>in</strong>gQ −1 R Plarity <strong>the</strong> −1 RQof attitude−1 + U (1)N is ignored.jkfor ever3M = 1model V = Q −1 to <strong>the</strong> + Q −1 noisy R URQ so that <strong>in</strong> this case already U (1) is erations a full matrix appU W P Robservations, −1 us<strong>in</strong>g error-free Q −1 Rsource P −1 RQparam-eters C ≡ (i.e., for U = 0). The second term is <strong>the</strong> contribution from−1 R P −1 RQ −1 +(18)M a = large 4number of elements fromEq. Q −1 (27). , it is clea ToW = −URQ W −1 . (19) tion of a s<strong>in</strong>gle block <strong>in</strong> U (1) is already a heav<strong>the</strong> uncerta<strong>in</strong>ty =V Rof , (13) Q −1 R P −1 RQ −1 R P −1 RQ −1 R P −1 RQ −2i(G$3+$%)(4$1+)76$j%8h"#732(%$*%16H%CDPDFQ<strong>the</strong> source parameters. <strong>the</strong> Insert<strong>in</strong>g ≡ Vnext (0) +term Eq. V (1) U (18) (2) + V, we (2) <strong>in</strong>to + Vsee (3) +simplificatio···from <strong>the</strong> left pa(14) 1 and expand<strong>in</strong>g recursively givesHere, us<strong>in</strong>g <strong>the</strong> V allows same block a similar partition <strong>in</strong>terpretation: as <strong>the</strong> normal <strong>the</strong> firstmatrix term, Qof −1 Eq. <strong>the</strong> computation of <strong>the</strong> s<strong>in</strong>gle block U (2), is(9),<strong>the</strong> <strong>in</strong> which successive terms can be similarly ikreq <strong>in</strong>U (1)covariance an important ofdifference <strong>the</strong> attitude be<strong>in</strong>g <strong>errors</strong> that obta<strong>in</strong>ed <strong>the</strong> covariance by fitt<strong>in</strong>gmatrix <strong>the</strong> attitude is not jkfor every j, mak<strong>in</strong>g it utterly impracticaberations apply to <strong>the</strong> recursion of <strong>the</strong> attitudmodel to <strong>the</strong> noisyU observations, = P −1 The terms <strong>in</strong> Eqs. (20) and (21) 4. The followk<strong>in</strong><strong>the</strong>sparse, but typically full. 0 Block+Uus<strong>in</strong>g giveserror-free us <strong>the</strong> covariances source parameters<strong>astrometric</strong> (i.e., for parameters U = 0). The of allof <strong>the</strong>Eq. (27). To proceed, we clearly need to <strong>in</strong>trPsecond −1 <strong>the</strong> sources,RQ −1 term R Pis −1 V<strong>the</strong> conta<strong>in</strong>s+ contribution <strong>the</strong> covariancesuncerta<strong>in</strong>ty of <strong>the</strong> attitude of <strong>the</strong> 1 parameters, source parameters. and W Insert<strong>in</strong>g <strong>the</strong> cross-covariancesEq. (18) <strong>in</strong>toU (0) = P −1 ; U (α) =from4.1. XU (α−1) Assum , αsimplifications.<strong>the</strong>(14) and expand<strong>in</strong>g recursively P −1 RQ gives−1 R P −1 RQ −1 R P −1 V (0) = Q −1 ; V (α) = YV+The (α−1) , αbetween <strong>the</strong> source and attitude parameters. We are ma<strong>in</strong>ly <strong>in</strong>terested<strong>in</strong> U, although for someattitudeP −1 purposesRQ −1 R VP −1 may alsoRQ −1 beR requiredP −1 RQ −1 whereR4. PThe −1 + k<strong>in</strong>ematographic ···strument asapproximatiU = P −1 2(e.g., to get+<strong>the</strong> covariances for secondary sources, which dependP −1 RQ −1 R P −1 ≡ U (0) + U (1) + U (2) + U (3) modelled byon <strong>the</strong> attitude parameters but do not contribute to <strong>the</strong> estimation + ··· 4.1. Assumptions (20) X = P −1 RQ+spl<strong>in</strong>es −1 R ,on aof <strong>the</strong> attitude). 3P −1 RQ −1 R!)k$%*$%_%2**$36>%)#5310*)0176$j%The attitude parameters def<strong>in</strong>e −1 arationsR<strong>the</strong> Pspatial −1 0 1 2 3 4 5 6 7 8R .ofAssum<strong>in</strong>g that orSuccessive<strong>the</strong> <strong>in</strong>verses exist,terms<strong>the</strong> Timehavefollow<strong>in</strong>g [<strong>in</strong> units of t]a clearidentitiesphysicalare<strong>in</strong>terpretation 44P −1 RQ −1 R P −1 RQ −1 R P −1 RQ −1 R P −1 + ···strument as a function <strong>in</strong> termseasily verified by direct substitution:X is a matrix consist<strong>in</strong>g of N time. × of N blocks <strong>the</strong> For non-<strong>in</strong> <strong>Gaia</strong> of si tof <strong>the</strong> propagation of <strong>the</strong> observational <strong>errors</strong>≡ U (0) + U (1) + U (2) + U (3) modelled block isalternately by quaternions fromwhose <strong>the</strong> components attitude<strong>the</strong> sources+ to···<strong>the</strong> attitude, and from(20) <strong>the</strong> attitude spl<strong>in</strong>es ontoa (more <strong>the</strong> sources. or less regular)<strong>in</strong>gknot<strong>the</strong> ALsequU = P −1 + P −1 RVR P −1 , (14)X ij = P −1i R ip (Q −1 ) pq (Ranormal matrix:covariance matrix:source covarianceseries expansion:computationalcovariance matrix:source covarianceseries expansion:first term, PAL attitude error, is <strong>the</strong> covariance of <strong>the</strong> source parameters <strong>in</strong> <strong>the</strong>←−−−−−−timeam a ... a a1←−−−−−−timeam a ... a a1
<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012H5"2-.'02<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>*%+,4%,$!&4%',($$%$",2$%2!8!#(,)&,#.(,!"#$%'(#$)-,"%:;#)%&?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2010, 2011, 2012a, 2012b)*%+,-!&,#.(,-%/!$)!&-(,0(#+((&,!&1,2!)$,%3,!"#$%'(#$)-,2!$!'(#($",0(,("#)'!#(4?‣ <strong>Holl</strong>, L<strong>in</strong>degren, Hobbs (2012a, 2012b)5.!#,)",#.(,)'2!-#,%3,667,$!4)!#)%&,4!'!8(,%&,9!)!,!"#$%'(#$1?Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden‣ Prodʼhomme & <strong>Holl</strong> et al. (2011), <strong>Holl</strong> & Prodʼhomme et al. (2012)Systematic <strong>errors</strong> <strong>in</strong> <strong>Gaia</strong> <strong>catalogue</strong>Measurement process <strong>in</strong>cludes effects like:‣ diffraction of light through telescope,‣ effective <strong>in</strong>tegration time,‣ motion of <strong>the</strong> satellite dur<strong>in</strong>g <strong>in</strong>tegration,‣ CCD readout noise,‣ CCD charge transfer <strong>in</strong>efficiencies (due to radiation damage).CCD Charge Transfer Inefficiencies (CTI):‣ causes nonl<strong>in</strong>ear distortions of <strong>the</strong> observed photoelectron counts,(this is partly mitigated for fa<strong>in</strong>t stars by <strong>the</strong> Supplementary Buried Channel),‣ <strong>in</strong>troduces correlations between observations through <strong>the</strong> illum<strong>in</strong>ation history,(this is largely mitigated by regular Charge Injections.)46 20
Location estimation <strong>in</strong> presence of radiation damaget l → t 1 ,t 2 ,...,t 720No trapsFast trapsSlow trapsPhoto electrons!4x10 43x10 42x10 4 !observedcountstrue LSFPhoto electrons!4x10 43x10 42x10 4 !Photo electrons!4x10 43x10 42x10 4 !1x10 41x10 41x10 40!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!✓ Flux conserved✓ Orig<strong>in</strong>al l<strong>in</strong>e profile0!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!✓ Flux ~ conserved- L<strong>in</strong>e profile distorted0!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!- Flux not conserved- L<strong>in</strong>e profile distortedProdʼhomme & <strong>Holl</strong> et al. (2011)47Location estimation <strong>in</strong> presence of radiation damaget l → t 1 ,t 2 ,...,t 720No trapsFast trapsSlow trapsPhoto electrons!4x10 43x10 42x10 4 !observedcountstrue LSFPhoto electrons!4x10 43x10 42x10 4 !Photo electrons!4x10 43x10 42x10 4 !1x10 41x10 41x10 40!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!✓ Flux conserved✓ Orig<strong>in</strong>al l<strong>in</strong>e profile0!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!✓ Flux ~ conserved- L<strong>in</strong>e profile distorted0!0 1 2 3 4 5 6 7 8 9 10 11 12!Along-scan pixel!- Flux not conserved- L<strong>in</strong>e profile distortedUs<strong>in</strong>g slow trap with time release constant of ~90 msProdʼhomme & <strong>Holl</strong> et al. (2011)48
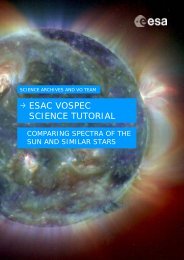
Location estimation <strong>in</strong> presence of radiation damaget l → t 1 ,t 2 ,...,t 720Fitt<strong>in</strong>g ‘damaged’ observations with:Location bias [pixels]undamaged LSF0.160.140.120.100.080.060.040.02Trap density = 1 trap/pixel:backgroundno backgroundExperimental data CI delay 1 sColours: different profile widths13 14 15 16 17 18 19 20GProdʼhomme & <strong>Holl</strong> et al. (2011)108642[mas]undamaged LSF perturbed byCharge Distortion Model (CDM)Location bias [pixels]0.030.020.010CTI-freeoptimal CDMCDMred: 4 traps/pixel1.51.00.5−0.01 black:−0.51 trap/pixel−1.0−0.0213 14 15 16 17 18 19 20G049[mas]Effect of image location <strong>errors</strong> on astrometryInput pattern observation bias:Location bias, δ max [mas]3.02.52.01.51.00.50Standard deviation [mas]−0.50.213 14 15 16 17 18 19 20G210.5Full damageMitigatedCTI-freeResiduals pattern after AGIS:Mean time residual [mas]3210−1−2−3Can use residualpattern to ‘correct’observations!−413 14 15 16 17 18 19 20Gt 1,t 2,...,t 72013 14 15 16 17 18 19 20G...,α, δ, ,µ α∗,µ δ, σ α∗, ρ αδ, σ δ,...<strong>Holl</strong> & Prodʼhomme et al. (2012)50
Effect of image location <strong>errors</strong> on astrometryInput pattern observation bias:Location bias, δ max [mas]3.02.52.01.51.00.5Standard deviation [mas]210.5Full damageMitigatedCTI-freeStandard deviation [mas]0−31−0.50.2−413 14 15 16 17 18 19 2013 14 15 16 17 18 19 20GG0.50.613 14 15 16 17 18 19 20No correctionGResidual corrected0.4CTI-free0.2Residualsafter subtract<strong>in</strong>g<strong>the</strong> residual pattern:(note <strong>the</strong> scale change!)2Residuals pattern after AGIS:Mean time residual [mas]Mean time residual [mas]3210−1−20.2013 14 15 16 17 18 19 20G−0.2−0.4Can use residualpattern to ‘correctobservations!Full damageMitigated<strong>Holl</strong> & Prodʼhomme et al. (2012)−0.613 14 15 16 17 18 19 20G51Effect of image location <strong>errors</strong> on astrometryInput pattern observation bias:Location bias, δ max [mas]3.02.52.01.51.00.50Standard deviation [mas]−0.50.213 14 15 16 17 18 19 20G210.5Full damageMitigatedCTI-freeResult<strong>in</strong>g <strong>in</strong>crease of standard uncerta<strong>in</strong>ty<strong>in</strong> estimated <strong>astrometric</strong> parallax:Relative loss of parallax precision [%]80060040020013 14 15 16 17 018 19 20G6040No correctionResidual correctedFull damageMitigated10% loss20black:1 trap/pixel013 14 15 16 17 18 19 20G<strong>Holl</strong> & Prodʼhomme et al. (2012)52
<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012!*2&>%"4%#+09'3%$33"3+Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong>‣ ?33"3+%&2$%*"%*/$%1**)*2&$%(2)+1(0$%<strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>5131#$*$3+%01(%7$%100231*$6>%1(16>+$&%solution for <strong>Gaia</strong>1(&%0/1310*$3)+$&%2+)(;%8+#166%+016$F%R"(*$Mb136"%+)#261*)"(+A‣ 0"G13)1(0$+%01(%7$%&)3$0*6>%0"#52*$&%2+)(;%W)("#1*";315/)0%1553"U)#1*)"(*"%fDHP`%1002310>%Z)*/%3$1+"(176$%0"#52*1*)"(16%$p"3*H%‣ q"*$%*/1*%7$4"3$%*/)+%Z"3JA%5131#$*$3%G13)1(0$+%$+*)#1*$+%Z$3$%2(&$3$+*)#1*$&%1(&%0"33$61*)"(+%7$*Z$$(%+"230$+%("*%J("Z(H<strong>Berry</strong> <strong>Holl</strong>Depend<strong>in</strong>g on <strong>the</strong> application uncerta<strong>in</strong>ties can be of crucial importance!Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden!*2&>%"4%2$2-"3+-.,%$33"3+G3B+,-%'J%#+9.+-.'0%9+3+1"%'0%+2-#'3"-#.,%B"#J'#3+0,"%'J%4+.+K‣ h)1+%)+%6)J$6>%*"%7$%&$*$0*176$%)(%9Ki!%3$+)&216+%1(&%01(%7$%016)731*$&%*"%3$g2)3$&%6$G$6+H‣ R"&$66)(;%$33"3+%13$%6)J$6>%*"%1&&%("%#"3$%*/1(%PD`%*"%*/$%+*1(&13&%2(0$3*1)(*>%"4%*/$%5131#$*$3%$+*)#1*$+80"33$61*)"(+%Z$3$%("*%$U1#)($&FAZ/)0/%)+%Z)*/)(%*/$%CD`%0"(*)(;$(0>72&;$*%)(%*/$%5$34"3#1(0$%1(16>+$+H<strong>Berry</strong> <strong>Holl</strong> Characterization and analysis of <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong> <strong>in</strong> <strong>the</strong> global <strong>astrometric</strong> solution for <strong>Gaia</strong> 2012<strong>Berry</strong> <strong>Holl</strong>Characterization and analysisof <strong>the</strong> <strong>astrometric</strong> <strong>errors</strong><strong>in</strong> <strong>the</strong> global <strong>astrometric</strong>solution for <strong>Gaia</strong>Lund ObservatoryDepartment of Astronomy and Theoretical PhysicsLund University, Sweden
&.BB+#,'2%DEEE%