A Continuous Adjoint Approach to Shape Op- timization for ... - M1
A Continuous Adjoint Approach to Shape Op- timization for ... - M1
A Continuous Adjoint Approach to Shape Op- timization for ... - M1
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
A <strong>Continuous</strong> <strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong><strong>for</strong> Navier S<strong>to</strong>kes FlowChristian Brandenburg, Florian Lindemann, MichaelUlbrich and Stefan UlbrichAbstract. In this paper we present an approach <strong>to</strong> shape op<strong>timization</strong> whichis based on continuous adjoint computations. If the exact discrete adjointequation is used, the resulting <strong>for</strong>mula yields the exact discrete reduced gradient.We first introduce the adjoint-based shape derivative computation in aBanach space setting. This method is then applied <strong>to</strong> the instationary Navier-S<strong>to</strong>kes equations. Finally, we give some numerical results.Mathematics Subject Classification (2000). Primary 76D55; Secondary 49K20.Keywords. shape op<strong>timization</strong>, Navier-S<strong>to</strong>kes equations, PDE-constrained op<strong>timization</strong>.1. IntroductionIn this paper, we consider the op<strong>timization</strong> of the shape of a body that is exposed<strong>to</strong> incompressible instationary Navier-S<strong>to</strong>kes flow in a channel. The developedtechniques are quite general and can, without conceptual difficulties, be used <strong>to</strong>address a wide class of shape op<strong>timization</strong> problems with Navier-S<strong>to</strong>kes flow. Thegoal is <strong>to</strong> find the optimal shape of the body B, which is exposed <strong>to</strong> instationaryincompressible fluid, with respect <strong>to</strong> some quantity of interest, e.g. drag, underconstraints on the shape of B.In a general setting, the shape op<strong>timization</strong> problem can be stated in thefollowing way: Minimize an objective functional ¯J, depending on a domain Ω anda state ỹ = ỹ(Ω) ∈ Y (Ω). The domain Ω is contained in a set of admissible domainsO ad . Furthermore, ỹ and Ω are coupled by the state equation Ē(ỹ, Ω) = 0. Thus,We greatfully acknowledge support of the Schwerpunktprogramm 1253 sponsored by the GermanResearch Foundation.
2 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrichthe abstract shape op<strong>timization</strong> problem readsmin ¯J(ỹ, Ω)s.t. Ē(ỹ, Ω) = 0, Ω ∈ O ad .The constraint Ē(ỹ, Ω) = 0 is a partial differential equation defined on Ω,which in our case is given by the instationary incompressible Navier-S<strong>to</strong>kes equations.<strong>Shape</strong> op<strong>timization</strong> is an important and active field of research with manyengineering applications, especially in the areas of fluid dynamics and aerodynamics.Detailed accounts of the theory and applications of shape op<strong>timization</strong> canbe found in, e.g., [1, 2, 3, 9, 15, 18]. We use the approach of trans<strong>for</strong>mation <strong>to</strong> areference domain, as originally introduced by Murat and Simon [17], see also [8].The domain is then fixed and the design is described by a trans<strong>for</strong>mation from afixed domain <strong>to</strong> the domain Ω corresponding <strong>to</strong> the current design. This makesoptimal control techniques readily applicable. Furthermore, as observed by Guillaumeand Masmoudi [8] in the context of linear elliptic equations, discretizationand op<strong>timization</strong> can be made commutable. This means that, if certain guidelinesare followed, then the discrete analogue of the continuous adjoint representationof the derivative of the reduced objective function is the exact derivative of thediscrete reduced objective function. This allows <strong>to</strong> circumvent the tedious differentiationof finite element code with respect <strong>to</strong> the position of the vertices of themesh. We apply this approach <strong>to</strong> shape op<strong>timization</strong> problems governed by the instationaryNavier-S<strong>to</strong>kes equations. On one hand we characterize the appropriatefunction space <strong>for</strong> domain trans<strong>for</strong>mation in this framework. On the other hand,we focus on the practical implementation of shape op<strong>timization</strong> methods basedon shape derivatives. We show that existing solvers <strong>for</strong> the state and and adjointequation on the current computational domain Ω k can be used <strong>to</strong> compute exactshape gradients conveniently <strong>for</strong> the continuous as well as <strong>for</strong> the discretized problem.Hence, although shape derivatives are defined through trans<strong>for</strong>mation <strong>to</strong> areference domain, standard solvers on the trans<strong>for</strong>med domain can be used <strong>for</strong> itscomputation.The outline of this paper is as follows: In section 2, we will present our approach<strong>for</strong> the derivative computation in shape op<strong>timization</strong> in a general setting.These general results will be applied <strong>to</strong> the instationary incompressible Navier-S<strong>to</strong>kes equations in section 3. In section 4 we present the discretization and stabilizationtechniques we use <strong>to</strong> solve the Navier-S<strong>to</strong>kes equations numerically, whichare based on the cG(1)dG(0) variant of the G 2 -finite-element discretization byEriksson, Estep, Hansbo, Johnson and others [4, 5]. Moreover, we explain howwe apply the adjoint calculus <strong>to</strong> obtain conveniently exact shape gradients on thediscrete level. We will then present numerical results obtained <strong>for</strong> a model problemin section 5, where we also briefly discuss the choice of shape trans<strong>for</strong>mations andparameterizations. Finally, in section 6, we will give conclusions and an outlook<strong>to</strong> future work.
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 32. The shape op<strong>timization</strong> problemIn this section, we present the framework that we will use <strong>for</strong> shape derivativecomputation in a functional analytical setting. We first trans<strong>for</strong>m the general shapeop<strong>timization</strong> problem, which is defined on varying domains, in<strong>to</strong> a problem thatis defined on a fixed reference domain Ω ref . Then, after introducing the reducedop<strong>timization</strong> problem on a space T of trans<strong>for</strong>mations of Ω ref , we state optimalityconditions and an adjoint based representation <strong>for</strong> the reduced gradient of theobjective function.2.1. Problem <strong>for</strong>mulation on a reference domainWe consider the abstract shape op<strong>timization</strong> problem given bymin ¯J(ỹ, Ω)s.t. Ē(ỹ, Ω) = 0, Ω ∈ O ad .Here, O ad denotes the set of admissible domains Ω ⊂ R d , d = 2, 3, ¯J is a realvalued objective function defined on a Banach space Y (Ω) of functions defined onΩ ⊂ R d ,¯J : {(ỹ, Ω) : ỹ ∈ Y (Ω), Ω ∈ O ad } → R,and Ē is an opera<strong>to</strong>r between function spaces Y (Ω) and Z(Ω) defined over Ω,Ē : {(ỹ, Ω) : ỹ ∈ Y (Ω), Ω ∈ O ad } → {˜z : ˜z ∈ Z(Ω), Ω ∈ O ad }with Ē(ỹ, Ω) ∈ Z(Ω) <strong>for</strong> all ỹ ∈ Y (Ω) and all Ω ∈ O ad.We now trans<strong>for</strong>m the shape op<strong>timization</strong> problem in<strong>to</strong> a more convenient<strong>for</strong>m. To this end, we consider a reference domain Ω ref ∈ O ad and interpret admissibledomains Ω ∈ O ad as images of Ω ref under suitable trans<strong>for</strong>mations. Thisis done by introducing a Banach space T(Ω ref ) ⊂ {τ : Ω ref → R d } of bicontinuoustrans<strong>for</strong>mations of Ω ref . We select a suitable subset T ad ⊂ T(Ω ref ) of admissibletrans<strong>for</strong>mations. The set O ad of admissible domains is thenO ad = {τ(Ω ref ) : τ ∈ T ad }.We assume that}Y (Ω ref ) = {ỹ ◦ τ : ỹ ∈ Y (τ(Ω ref ))}ỹ ∈ Y (τ(Ω ref )) ↦→ y := ỹ ◦ τ ∈ Y (Ω ref ) is a homeomorphism∀ τ ∈ T ad . (A)Then, we can define the following equivalent op<strong>timization</strong> problem, which is entirelydefined on the reference domain:min J(y, τ)s.t. E(y, τ) = 0, τ ∈ T ad .(2.1)Here, the opera<strong>to</strong>r E : Y (Ω ref ) × T(Ω ref ) → Z(Ω ref ) is defined such that <strong>for</strong>all τ ∈ T ad and ỹ ∈ Y (τ(Ω ref )) it holds thatE(y, τ) = 0 ⇐⇒ Ē(ỹ, τ(Ω ref)) = 0,where y = ỹ ◦ τ. The objective function J is defined in the same fashion.
4 C. Brandenburg, F. Lindemann, M. Ulbrich and S. UlbrichIn the following, we will consequently denote by ỹ the functions on the physicaldomain τ(Ω ref ) and by y the corresponding function on the reference domainΩ ref , wherey = ỹ ◦ τ.Remark 2.1. Let Ω ′ ⊃ ¯Ω ref be open and bounded with Lipschitz boundary. If,which is the typical case <strong>for</strong> elliptic partial differential equations, Y (Ω) = H 1 0 (τ(Ω ref)),Z(Ω) = H −1 (τ(Ω ref )) with τ ∈ T ad , then (A) holds if we choose T(Ω ref ) =W 1,∞ (Ω ′ ) d and if we require that all τ ∈ T ad ⊂ W 1,∞ (Ω ′ ) d are such that τ :¯Ω ref → τ(¯Ω ref ) is a bi-Lipschitzian mapping.For other spaces Y (Ω) and Z(Ω), it can be necessary <strong>to</strong> impose further requirementson T ad .If Ē is given in variational <strong>for</strong>m then the opera<strong>to</strong>r E can be obtained by usingthe trans<strong>for</strong>mation rule <strong>for</strong> integrals. This will be carried out <strong>for</strong> the instationaryNavier-S<strong>to</strong>kes equations in section 3.2.2. Reduced problem and optimality conditionsIn the following, we will consider the op<strong>timization</strong> problem on the reference domain(2.1), which has the <strong>for</strong>mmin J(y, τ)s.t. E(y, τ) = 0, τ ∈ T ad .(2.1)We denote by E y and E τ the partial derivatives of E with respect <strong>to</strong> y and τ.In order <strong>to</strong> derive first order optimality conditions, we make the followingassumptions:(A1) T ad ⊂ T(Ω ref ) is nonempty, closed, convex and assumption (A) holds.(A2) J : Y (Ω ref ) × T(Ω ref ) → R and E : Y (Ω ref ) × T(Ω ref ) → Z(Ω ref ) are continuouslyFréchet-differentiable.(A3) There exists an open neighborhood Tad ′ ⊂ T(Ω ref) of T ad and a unique solutionopera<strong>to</strong>r S : T ad ′ → Y (Ω ref), assigning <strong>to</strong> each τ ∈ T ad ′ a unique y(τ) ∈Y (Ω ref ), such that E(y(τ), τ) = 0.(A4) The derivative E y (y(τ), τ) ∈ L(Y (Ω ref ), Z(Ω ref )) is continuously invertible<strong>for</strong> all τ ∈ T ad ′ .Under these assumptions y(τ) is continuously differentiable on τ ∈ T ′ ad ⊃ T adby the implicit function theorem. Thus, it is reasonable <strong>to</strong> define the followingreduced problem on the space of trans<strong>for</strong>mations T(Ω ref ):min j(τ) := J(y(τ), τ)s.t. τ ∈ T ad,where y(τ) is given as the solution of E(y(τ), τ) = 0.In the following we will use the abbreviationsT ref := T(Ω ref ), Y ref := Y (Ω ref ), Z ref := Z(Ω ref ).
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 5In order <strong>to</strong> derive optimality conditions and <strong>to</strong> compute the reduced gradientj ′ (τ), we introduce the Lagrangian function L : Y ref × T ref × Z ∗ ref → R,L(y, τ, λ) := J(y, τ) + 〈λ, E(y, τ)〉 Z ∗ref ,Z ref,with Lagrange multiplier λ ∈ Zref ∗ .Under assumptions (A1)–(A4) a local solution (y, τ) ∈ Y ref ×T ad of (2.1) satisfieswith an appropriate adjoint state λ ∈ Zref ∗ the following first order necessaryoptimality conditions.L λ (y, τ, λ) = E(y, τ) = 0(state equation)L y (y, τ, λ) = J y (y, τ) + Ey ∗ (y, τ)λ = 0 (adjoint equation)〈L τ (y, τ, λ), ˜τ − τ〉 T ∗ref ,T ref= 〈J τ (y, τ) + Eτ(y, ∗ τ)λ, ˜τ − τ〉 T ∗ref ,T ref≥ 0 ∀˜τ ∈ T ad .2.2.1. <strong>Adjoint</strong>-based shape derivative computation on the reference domain. Byusing the adjoint equation the reduced gradient j ′ (τ) can be determined as follows:1. For given τ, find y(τ) ∈ Y ref by solving the state equation〈E(y, τ), ϕ〉 Zref ,Z ∗ ref = 0 ∀ϕ ∈ Z∗ ref2. Find the corresponding Lagrange multiplier λ ∈ Zref ∗ by solving the adjointequation〈λ, E y (y, τ)ϕ〉 Z ∗ref ,Z ref= −〈J y (y, τ), ϕ〉 Y ∗ref ,Y ref∀ϕ ∈ Y ref (2.2)3. The reduced gradient with respect <strong>to</strong> τ is now given by〈j ′ (τ), · 〉 T ∗ref ,T ref= 〈λ, E τ (y, τ) · 〉 Z ∗ref ,Z ref+ 〈J τ (y, τ), · 〉 T ∗ref ,T ref. (2.3)2.2.2. <strong>Adjoint</strong>-based shape derivative computation on the physical domain. Forthe application of op<strong>timization</strong> algorithms it is convenient <strong>to</strong> solve, <strong>for</strong> a giveniterate τ k ∈ T(Ω ref ), an equivalent representation of the op<strong>timization</strong> problem onthe domain Ω k := τ k (Ω ref ). To this end, we introduce opera<strong>to</strong>rs Ẽ, ˜J and ˜j, whichdiffer from E, J and j only in that the function spaces Y , Z and T are defined onΩ k instead of Ω ref , i.e.,Ẽ(ỹ, ˜τ) = 0 ⇐⇒ E(y, ˜τ ◦ τ k ) = 0, where y = ỹ ◦ (˜τ ◦ τ k ).Then we have the relation˜j(˜τ) = j(˜τ ◦ τ k ) = j(τ) and there<strong>for</strong>e ˜τ ◦ τ k = τ, i.e., ˜τ = τ ◦ τ −1k .We are thus led <strong>to</strong> the following procedure <strong>for</strong> computing the reduced gradient:1. For id : Ω k → Ω k , id(τ k (x)) = τ k (x), x ∈ Ω ref , find ỹ k ∈ Y (Ω k ) by solvingthe state equation〈Ẽ(ỹ k, id), ϕ〉 Z(Ωk ),Z(Ω k ) ∗ = 0 ∀ϕ ∈ Z(Ω k) ∗ ,where ỹ k (τ k (x)) = y k (x), x ∈ Ω ref . This corresponds <strong>to</strong> solving the standardstate equation in variational <strong>for</strong>m on the domain Ω k , which in the abstractsetting was denoted by Ē(ỹ k, Ω k ) = 0.
6 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrich2. Find the corresponding Lagrange multiplier ˜λ k ∈ Z(Ω k ) ∗ by solving theadjoint equation〈˜λ k , Ẽỹ(ỹ k , id)ϕ〉 Z(Ωk ) ∗ ,Z(Ω k ) = −〈 ˜Jỹ(ỹ k , id), ϕ〉 Y (Ωk ) ∗ ,Y (Ω k ) ∀ϕ ∈ Y (Ω k ),where ˜λ k (τ k (x)) = λ k (x), x ∈ Ω ref . This corresponds <strong>to</strong> the solution of thestandard adjoint equation on Ω k .3. The reduced gradient applied <strong>to</strong> V ∈ T(Ω ref ) is now given by〈j ′ (τ k ), V 〉 T ∗ref ,T ref= 〈˜j ′ (id), Ṽ 〉 T(Ω k ) ∗ ,T(Ω k )<strong>for</strong> Ṽ ∈ T(Ω k), Ṽ ◦τ k = V , i.e.,= 〈˜λ k , Ẽ˜τ(ỹ k , id)Ṽ 〉 Z(Ω k ) ∗ ,Z(Ω k ) + 〈 ˜J˜τ (ỹ k , id), Ṽ 〉 T(Ω k ) ∗ ,T(Ω k )B k ∈ L(T(Ω ref ), T(Ω k )),then we have by our previous calculation−1 Ṽ = V ◦τk. If we define the linear opera<strong>to</strong>rB k V = V ◦ τ −1k(2.4)j ′ (τ k ) = B ∗ k˜j ′ (id) = B ∗ k(Ẽ˜τ(ỹ k , id) ∗˜λk + ˜J˜τ (ỹ k , id)).This procedure yields the exact gradient of the reduced objective function and hasthe advantage that we are able <strong>to</strong> use standard PDE-solvers <strong>for</strong> the state equationand adjoint equation on the domain Ω k , since we evaluate at ˜τ = id.2.3. Derivatives with respect <strong>to</strong> shape parametersIn practice, the shape of a domain is defined by design parameters u ∈ U with afinite or infinite dimensional design space U. Thus, we have a map τ : U → T(Ω ref ),u ↦→ τ(u) and a reference control u 0 ∈ U with τ(u 0 ) = id. Derivatives of thereduced objective function j(τ(u)) at u k are obtained using the chain rule. Withτ k = τ(u k ) and B k in (2.4) we have〈 ddu j(τ(u k)), · 〉 U ∗ ,U = 〈j ′ (τ(u k )), τ u (u k ) · 〉 T(Ωref ) ∗ ,T(Ω ref )= 〈˜j ′ (id), (τ u (u k ) · ) ◦ τ(u k ) −1 〉 T(Ωk ) ∗ ,T(Ω k )= 〈˜j ′ (id), B k τ u (u k ) · 〉 T(Ωk ) ∗ ,T(Ω k ) = 〈τ u (u k ) ∗ B ∗ k˜j ′ (id), · 〉 U ∗ ,U.Overall, this approach provides a flexible framework that can be used <strong>for</strong> arbitrarytypes of trans<strong>for</strong>mations (e.g. boundary displacements, free <strong>for</strong>m de<strong>for</strong>mation).The idea of using trans<strong>for</strong>mations <strong>to</strong> describe varying domains can be found, e.g.,in Murat and Simon [17] and Guillaume and Masmoudi [8].3. <strong>Shape</strong> op<strong>timization</strong> <strong>for</strong> the Navier-S<strong>to</strong>kes equationsWe now apply this approach <strong>to</strong> shape op<strong>timization</strong> problems governed by the instationaryNavier-S<strong>to</strong>kes equations <strong>for</strong> a viscous, incompressible fluid on a boundeddomain Ω = τ(Ω ref ) with Lipschitz boundary. According <strong>to</strong> our convention, wewill denote all quantities on the physical domain by ˜.
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 7For Ω ⊂ R d with spatial dimension d = 2 or 3, let Γ D ⊂ ∂Ω be a nonemptyDirichlet boundary and Γ N = ∂Ω \ Γ D . We consider the problemṽ t − ν∆ṽ + (ṽ · ∇)ṽ + ∇˜p = ˜fdiv ṽ = 0ṽ = ṽ D˜pñ − ν ∂ṽ∂ñ = 0ṽ(·, 0) = ṽ 0on Ω × Ion Ω × Ion Γ D × Ion Γ N × Ion Ωwhere ṽ : Ω × I → R d denotes the velocity ṽ(x, t) and ˜p : Ω × I → R the pressure˜p(x, t) of the fluid at a point x at time t, ñ : ∂Ω → R d is the outer unit normal.Here I = (0, T), T > 0 is the time interval and ν > 0 is the kinematic viscosity;if the equations are written in dimensionless <strong>for</strong>m, ν can be interpreted as 1/Rewhere Re is the Reynolds number.We introduce the spacesHD(Ω) 1 := {ṽ ∈ H 1 (Ω) d : ṽ| ΓD = 0}, V := {ṽ ∈ HD(Ω) 1 d : div ṽ = 0},∫H := cl L 2(V ), L 2 0 (Ω) := {˜p ∈ L2 (Ω) : ˜p = 0},the corresponding Gelfand triple V ֒→ H ֒→ V ∗ , and defineW 2,q (I; V ) := {ṽ ∈ L 2 (I; V ) : ṽ t ∈ L q (I; V ∗ )}.Now letṽ D ∈ H 1 (Ω), div ṽ D = 0, ˜f ∈ L 2 (I; V ∗ ), ṽ 0 ∈ H.Under these assumptions the following results are known.• If Γ D = ∂Ω, i.e. Γ N = ∅, then <strong>for</strong> d = 2 there exists a unique weak solution(ṽ, ˜p) with ṽ − ṽ D ∈ W 2,2 (I; V ) and ˜p(·, t) ∈ L 2 0 (Ω), t ∈ I. For d = 3 thereexists a weak solution (ṽ, ˜p) with ṽ − ṽ D ∈ W 2,4/3 (I; V ) ∩ L ∞ (I; H) and˜p(·, t) ∈ L 2 0 (Ω), t ∈ I, which is not necessarily unique. For the case ṽ D = 0the proofs can be found <strong>for</strong> example in [19, Ch. III]. These proofs can beextended <strong>to</strong> ṽ D ≠ 0 under the above assumptions on ṽ D .• If Γ N ≠ ∅ and Γ D satisfies some geometric properties (<strong>for</strong> example, all x ∈ Ωcan be connected in all coordinate directions by a line segment in Ω <strong>to</strong> apoint in Γ D ) and if a sequence of Galerkin approximations exists that doesnot exhibit inflow on Γ N then the same can be shown as <strong>for</strong> the Dirichlet case:For d = 2 there exists a unique weak solution (ṽ, ˜p) with ṽ −v D ∈ W 2,2 (I; V )and ˜p(·, t) ∈ L 2 0 (Ω), t ∈ I. For d = 3 there exists a weak solution (v, ˜p) withṽ − ṽ D ∈ W 2,4/3 (I; V ) ∩ L ∞ (I; H) and ˜p(·, t) ∈ L 2 0(Ω), t ∈ I, which is notnecessarily unique. In fact, in the case without inflow on Γ N all additionalboundary terms have the correct sign such that the proofs in [19, Ch. III] <strong>for</strong>the Dirichlet case can be adapted.In the case of possible inflow an existence and uniqueness result local intime and <strong>for</strong> small data global in time can be found in [10].Ω
8 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrich3.1. Weak <strong>for</strong>mulationIn the following we consider the case d = 2 and Γ N = ∅ <strong>to</strong> have a general globalexistence and uniqueness result at hand. Moreover, <strong>to</strong> avoid technicalities in <strong>for</strong>mulatingthe equations, we consider homogeneous boundary data ṽ D ≡ 0. Thenwe have H 1 D (Ω) = H1 0 (Ω)d with the above notations.The classical weak <strong>for</strong>mulation is now: Find ṽ ∈ W 2,2 (I; V ) such that∫〈ṽ t (·, t), ˜w〉 V ∗ ,V +∫=ΩΩṽ(·, 0) = ṽ 0 .∫ṽ(x, t) T ∇ṽ(x, t) ˜w(x)dx + ν∇ṽ(x, t) : ∇ ˜w(x)dxΩ˜f(x, t) T ˜w(x)dx∀ ˜w ∈ V <strong>for</strong> a.a. t ∈ I(3.1)As mentioned above, <strong>for</strong> ˜f ∈ L 2 (I; V ∗ ) and ṽ 0 ∈ H there exists a unique weaksolution ṽ ∈ W 2,2 (I; V ). The pressure ˜p(·, t) ∈ L 2 0 (Ω), t ∈ I, is now uniquelydetermined, see [19, Ch. III].The weak <strong>for</strong>mulation (3.1) is equivalent <strong>to</strong> the following velocity-pressure<strong>for</strong>mulation: Find ṽ ∈ W 2,2 (I; H0 1(Ω)d ) and ˜p(·, t) ∈ L 2 0 (Ω), t ∈ I, such that∫∫〈ṽ t (·, t), ˜w〉 H −1 ,H0 1 + ṽ(x, t) T ∇ṽ(x, t) ˜w(x)dx + ν∇ṽ(x, t) : ∇ ˜w(x)dx∫Ω∫Ω− ˜p(x, t) div ˜w(x)dx = ˜f(x, t) T ˜w(x)dxΩΩ∫∀ ˜w ∈ H0(Ω) 1 <strong>for</strong> a.a. t ∈ I˜q(x) div ṽ(x, t) = 0∀ ˜q ∈ L 2 0(Ω) <strong>for</strong> a.a. t ∈ IΩṽ(·, 0) = ṽ 0 .To obtain a weak velocity-pressure <strong>for</strong>mulation in space-time, which is convenient<strong>for</strong> adjoint calculations, we have <strong>to</strong> ensure that ˜p ∈ L 2 (I; L 2 0(Ω)). To this end weassume that the data ˜f and ṽ 0 are sufficiently regular, <strong>for</strong> example, see [19, Ch.III, Thm. 3.5],Define the spacesThen˜f, ˜f t ∈ L 2 (I; V ∗ ), ˜f(·, 0) ∈ H, ṽ 0 ∈ V ∩ H 2 (Ω) d . (3.2)Y (Ω) := W(I; H0 1 (Ω)d ) × L 2 (I; L 2 0 (Ω)), (3.3)Z(Ω) := L 2 (I; H −1 (Ω) d ) × L 2 (I; L 2 0(Ω)).Z ∗ (Ω) := L 2 (I; H 1 0(Ω) d ) × L 2 (I; L 2 0(Ω))
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 9and the weak <strong>for</strong>mulation (3.1) is equivalent <strong>to</strong>: Find (ṽ, ˜p) ∈ Y (Ω), where Ω =τ(Ω ref ) such that〈( ˜w, ˜q), Ē((ṽ, ˜p), Ω)〉 Z ∗ (Ω),Z(Ω) =∫∫= ṽ(x, 0) T ˜w(x, 0) dx − ṽ T 0 ˜w(·, 0) dxΩΩ∫ ∫∫ ∫+ ṽ T t ˜w dx dt + ν∇ṽ : ∇ ˜w dx dtI ΩI Ω∫ ∫∫ ∫+ ṽ T ∇ṽ ˜w dx dt − ˜p div ˜w dx dtI ΩI Ω∫ ∫∫ ∫− ˜f T ˜w dx dt + ˜q div ṽ dx dt = 0IΩThis <strong>for</strong>mulation defines now the state equation opera<strong>to</strong>rIΩ∀ ( ˜w, ˜q) ∈ Z ∗ (Ω).Ē : {(ỹ, Ω) : ỹ ∈ Y (Ω), Ω ∈ O ad } → {˜z : ˜z ∈ Z(Ω), Ω ∈ O ad } .3.2. Trans<strong>for</strong>mation <strong>to</strong> the reference domainIn the following we assume that(3.4)(T) Ω ref is a bounded Lipschitz domain and Ω ′ ⊃ ¯Ω ref is open and bounded withLipschitz boundary. Moreover T ad ⊂ W 2,∞ (Ω ′ ) d is bounded such that <strong>for</strong>all τ ∈ T ad the mappings τ : ¯Ω ref → τ(¯Ω ref ) are bi-Lipschitzian and satisfydet(τ ′ ) ≥ δ > 0, with a constant δ > 0. Here, τ ′ (x) = ∇τ(x) T denotes theJacobian of τ.Moreover, the data ṽ 0 , ˜f are given such that˜f ∈ C 1 (I; V (Ω)), ṽ 0 ∈ V (Ω) ∩ H 2 (Ω) d ∀Ω ∈ O ad = {τ(Ω ref ) : τ ∈ T ad },i.e. the data ṽ 0 , ˜f 0 are used on all Ω ∈ O ad .Then assumption (T) ensures in particular (3.2) and assumption (A) holds in thefollowing obvious version <strong>for</strong> time dependent problems, where the trans<strong>for</strong>mationacts only in space.Lemma 3.1. Let T ad satisfy assumption (T). Then the state space Y (Ω) defined in(3.3) satisfies assumption (A), more precisely,}Y (Ω ref ) = {(ṽ, ˜p)(τ(·), ·) : (ṽ, ˜p) ∈ Y (τ(Ω ref ))}∀ τ ∈ T ad .(ṽ, ˜p) ∈ Y (τ(Ω ref )) ↦→ (v, p) := (ṽ, ˜p)(τ(·), ·) ∈ Y (Ω ref ) is a homeom.A proof of this result is beyond the scope of this paper and will be givenelsewhere.Given the weak <strong>for</strong>mulation of the Navier-S<strong>to</strong>kes equations on a domainτ(Ω ref ) we can apply the trans<strong>for</strong>mation rule <strong>for</strong> integrals <strong>to</strong> obtain a variational<strong>for</strong>mulation based on the domain Ω ref . Using our convention <strong>to</strong> write˜<strong>for</strong> a functionthat is defined on τ(Ω ref ) we use the identificationsv(x, t) := ṽ(τ(x), t),p(x, t) := ˜p(τ(x), t),
10 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrichetc. and the identityUsing this <strong>for</strong>malism we get <strong>for</strong> example∫I∫τ(Ω ref )∇˜x˜z(τ(x)) = τ ′ (x) −T ∇ x z(x), x ∈ Ω ref .∫ν∇ṽ : ∇ ˜w dx dt =d∑∫I i=1Ω refν∇v T i τ ′−1 τ ′−T ∇w i detτ ′ dx dt.In this way and by using Lemma 3.1 we arrive at the following equivalent <strong>for</strong>mof the weak <strong>for</strong>mulation (3.4) on τ(Ω ref ), which is only based on the domain Ω ref :Find (v, p) ∈ Y (Ω ref ) such that <strong>for</strong> all (w, q) ∈ Z ∗ (Ω ref )〈(w, q), E((v, p), τ)〉 Z ∗ (Ω ref ),Z(Ω ref ) =∫∫= v(x, 0) T w(x, 0)detτ ′ dx − ṽ 0 (τ(x)) T w(x, 0)det τ ′ dxΩ ref Ω ref∫ ∫d∑∫ ∫+ v T t w detτ ′ dxdt + ν∇vi T τ ′−1 τ ′−T ∇w i detτ ′ dxdtI Ω ref i=1 I Ω ref(3.5)∫ ∫∫ ∫+ v T τ ′−T ∇v w detτ ′ dx dt − p tr(τ ′−T ∇w)detτ ′ dxdtI Ω ref I Ω∫ ∫∫ ∫ ref− ˜f(τ(x), t) T w detτ ′ dxdt + q tr(τ ′−T ∇v)detτ ′ dxdt = 0.I Ω ref I Ω refFor τ = id we recover directly the weak <strong>for</strong>mulation (3.4) on the domain Ω = Ω ref ,<strong>for</strong> general τ ∈ T ad we obtain an equivalent <strong>for</strong>m of (3.4) on the domain Ω =τ(Ω ref ).3.3. Objective functionWe consider an objective functional ¯J defined on the domain τ(Ωref ) of the type∫ ∫¯J((ṽ, ˜p), τ(Ω ref )) = f 1 (x, ṽ(x, t), ∇ṽ(x, t), ˜p(x, t))dxdt∫+Iτ(Ω ref )τ(Ω ref )f 2 (x, ṽ(x, T))dx(3.6)with f 1 : ⋃ τ ∈T adτ(Ω ref ) × R 2 × R 2,2 × R and f 2 : ⋃ τ ∈T adτ(Ω ref ) × R 2 → R. Againwe trans<strong>for</strong>m the objective function <strong>to</strong> the reference domain Ω ref .∫ ∫¯J((ṽ, ˜p), τ(Ω ref )) = f 1 (τ(x), v(x, t), τ ′ (x) −T ∇v(x, t), p(x, t))det τ ′ dx dtI Ω∫ ref+ f 2 (τ(x), v(x, T))det τ ′ dxΩ ref=: J D ((v, p), τ) + J T (v, τ) = J((v, p), τ).
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 113.4. <strong>Adjoint</strong> equationWe apply now the adjoint procedure of subsection 2.2.1 <strong>to</strong> compute the shape gradient.To this end, we have <strong>to</strong> compute the Lagrange multipliers (λ, µ) ∈ Z ∗ (Ω ref )by solving the adjoint system (2.2), which reads in this case〈(λ, µ), E (v,p) ((v, p), τ)(w, q)〉 Z ∗ (Ω ref ),Z(Ω ref )= −〈J (v,p) ((v, p), τ), (w, q)〉 Y ∗ (Ω ref ),Y (Ω ref ) ∀(w, q) ∈ Y (Ω ref )with the given weak solution (v, p) ∈ Y (Ω ref ) of the state equation. In detail weseek (λ, µ) ∈ Z ∗ (Ω ref ) with∫ ∫−Iw T λ t det τ ′ dt dx +Ω ref∫w(x, T) T λ(x, T)detτ ′ dxΩ ref∫ d∑∫+ ν∇wi T τ ′−1 τ ′−T ∇(λ) i detτ ′ dx dtI i=1 Ω ref∫ ∫(+ w T τ ′−T ∇v + v T τ ′−T ∇w ) (3.7)λ detτ ′ dx dtI Ω∫ ∫ ref∫ ∫− q tr(τ ′−T ∇λ)detτ ′ dx dt +I Ω ref Iµ tr(τ ′−T ∇w)detτ ′ dx dtΩ ref= −〈J (v,p) ((v, p), τ), (w, q)〉 Y ∗ (Ω ref ),Y (Ω ref ) ∀(w, q) ∈ Y (Ω ref ).For τ = id this is the weak <strong>for</strong>mulation of the usual adjoint system of the Navier-S<strong>to</strong>kes equations on Ω ref , which reads in strong <strong>for</strong>m−λ t − ν∆λ − (∇λ) T v + (∇v)λ − ∇µ = −Jv D ((v, p), id) on− div λ = −Jp D ((v, p), id) onλ = 0λ(·, T) = −Jv T (v, id) onΩ ref × IΩ ref × Ion ∂Ω ref × IΩ refFor general τ ∈ T ad the adjoint system (3.7) is equivalent <strong>to</strong> the usual adjointsystem of the Navier-S<strong>to</strong>kes equations on τ(Ω ref ). A detailed analysis of the adjointequation of the Navier-S<strong>to</strong>kes equations can be found in [11, 21].3.5. Calculation of the shape gradientThe derivative of the reduced objective j(τ) := J((v(τ), p(τ)), τ) is now given by(2.3), which reads in our case〈j ′ (τ), · 〉 T ∗ (Ω ref ),T(Ω ref ) =〈(λ, µ), E τ ((v, p), τ) · 〉 Z ∗ (Ω ref ),Z(Ω ref ) + 〈J τ ((v, p), τ), · 〉 T ∗ (Ω ref ),T(Ω ref ).(3.8)To state this in detail, we have <strong>to</strong> compute the derivatives of E and J with respect<strong>to</strong> τ. Let (v, p) and (λ, µ) be the solution of the Navier-S<strong>to</strong>kes equations (3.5) andthe corresponding adjoint equation (3.7) <strong>for</strong> given τ ∈ T ad . Using the <strong>for</strong>mulation
12 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrich(3.5) of E on the reference domain Ω ref the first term can be expressed as〈(λ, µ), E τ ((v, p), τ)V 〉 Z ∗ (Ω ref ),Z(Ω ref ) =∫= (v(x, 0) − ṽ 0 (τ(x))) T λ(x, 0) tr(τ ′−1 V ′ )detτ ′ dxΩ∫ ref∫ ∫− V T ∇ṽ 0 (τ(x))λ(x, 0)det τ ′ dx + v T t λ tr(τ ′−1 V ′ )det τ ′ dx dtΩ ref I Ω refd∑∫ ∫+ ν∇vi T τ ′−1 ( tr(τ ′−1 V ′ )I − V ′ τ ′−1 − τ ′−T V ′T )τ ′−T ∇λ i detτ ′ dx dti=1 I Ω ref∫ ∫+ v T ( tr(τ ′−1 V ′ )I − τ ′−T V ′T )τ ′−T ∇vλ detτ ′ dx dtI Ω∫ ∫ ref+ p ( tr(τ ′−T V ′T τ ′−T ∇λ) − tr(τ ′−T ∇λ) tr(τ ′−1 V ′ ) ) detτ ′ dx dtI Ω∫ ∫ ref(− ˜f(τ(x), t) T tr(τ ′−1 V ′ ) + V T ∇ ˜f(τ(x),)t) λ detτ ′ dx dtI Ω∫ ∫ ref− µ ( tr(τ ′−T V ′T τ ′−T ∇v) − tr(τ ′−T ∇v) tr(τ ′−1 V ′ ) ) det τ ′ dx dt.I Ω refIf ṽ solves the state equation then the first term vanishes.The part with the objective functional is given by〈J τ ((v, p), τ), V 〉 T ∗ (Ω ref ),T(Ω ref ) =∫ ∫= f 1 (τ(x), v, τ ′ (x) −T ∇v(x, t), p) tr(τ ′−1 V ′ )detτ ′ dx dtI Ω∫ ∫ref∂−I Ω ref∂(∇ṽ) f 1(τ(x), v, τ ′ (x) −T ∇v(x, t), p)τ ′−T V ′T τ ′−T ∇v det τ ′ dx dt∫ ∫∂+I Ω ref∂˜x f 1(τ(x), v, τ ′ (x) −T ∇v(x, t), p)V detτ ′ dx dt∫+ f 2 (τ(x), v(x, T)) tr(τ ′−1 V ′ )det τ ′ dxΩ∫ref∂+Ω ref∂˜x f 2(τ(x), v(x, T))V detτ ′ dx.
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 13If τ = id, i.e. τ(Ω ref ) = Ω ref we obtain the following <strong>for</strong>mula <strong>for</strong> the reducedgradient, where we omit the first term, since v(·, 0) = ṽ 0 (τ(·)).〈j ′ (id), V 〉 T ∗ (Ω ref ),T(Ω ref ) =∫− V T ∇ṽ 0 (x)λ(x, 0) dxΩ∫ ref∫ ∫+ vI∫Ω T t λ div V dx dt + ν∇v : ∇λ div V dx dtref I Ω refd∑∫ ∫− ν∇v T i (V ′ + V ′T )∇λ i dx dti=1 I Ω ref∫ ∫∫ ∫− v T V ′T ∇vλ dx dt + v T ∇vλ div V dx dtI Ω ref I Ω∫ ∫∫ ∫ ref+ p tr(V ′T ∇λ) dx dt − p div λ div V dx dtI Ω ref I Ω∫ ∫∫ ∫ ref− ˜f T λ div V dx dt − V T ∇ ˜fλ dx dtI Ω ref I Ω∫ ∫∫ ∫ ref− µ tr(V ′T ∇v) dx dt + µ div v div V dx dtI Ω ref I Ω∫ ∫ref+ f 1 (x, v, ∇v, p) div V dx dtI Ω∫ ∫ref∂−I Ω ref∂(∇ṽ) f 1(x, v, ∇v, p)V ′T ∇v dx dt∫ ∫∂+I Ω ref∂˜x f 1(x, v, ∇v, p)V dx dt∫+ f 2 (x, v(x, T)) div V dxΩ∫ref∂+Ω ref∂˜x f 2(x, v(x, T))V dx.(3.9)Remark 3.2. As already mentioned in subsection 2.2.2, <strong>for</strong> computational purposesit is convenient <strong>for</strong> a given iterate τ k <strong>to</strong> calculate the reduced gradien<strong>to</strong>n the domain Ω k . As described in detail in 2.2.2 we have <strong>to</strong> solve the Navier-S<strong>to</strong>kes equations and the adjoint system on Ω k . Using 〈j ′ (τ k ), V 〉 T ∗ (Ω ref ),T(Ω ref ) =〈˜j ′ (id), Ṽ 〉 T ∗ (Ω k ),T(Ω k ) we can take the <strong>for</strong>mula above replacing Ω ref by Ω k andusing the corresponding functions defined on Ω k .Finally, if we assume more regularity <strong>for</strong> the state and adjoint, we can integrateby parts in the above <strong>for</strong>mula and can represent the shape gradient as afunctional on the boundary.However, we prefer <strong>to</strong> work with the distributed version (3.8), since it isalso appropriate <strong>for</strong> FE-Galerkin approximations, while the integration by parts
14 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrich<strong>to</strong> obtain the boundary representation is not justified <strong>for</strong> FE-discretizations withH 1 -elements. In addition, (3.8) can also easily be transferred <strong>to</strong> a boundary representationby using the procedure of subsection 2.3 with a boundary displacement<strong>to</strong>-domaintrans<strong>for</strong>mation mapping u ↦→ τ(u) ∈ T ad . For Galerkin discretizationthe continuous adjoint calculus can then easily be applied on the discrete level.4. DiscretizationTo discretize the instationary Navier-S<strong>to</strong>kes equations, we use the cG(1)dG(0)space-time finite element method, which uses piecewise constant finite elements intime and piecewise linear finite elements in space. The cG(1)dG(0) method is avariant of the General Galerkin G 2 -method developed by Eriksson, Estep, Hansbo,and Johnson [4, 5].Let I = {I j = (t j−1 , t j ] : 1 ≤ j ≤ N} be a partition of the time interval (0, T]with a sequence of discrete time steps 0 = t 0 < t 1 < · · · < t N = T and length ofthe respective time intervals k j := |I j | = t j − t j−1 .With each time step t j , we associate a partition T j of the spatial domain Ωand the finite element subspaces V j h , P j hof continuous piecewise linear functionsin space.The cG(1)dG(0) space-time finite element discretization with stabilizationcan be written as an implicit Euler scheme: v 0 h = v 0 and <strong>for</strong> j = 1 . . .N, find(v j h , pj h ) ∈ V j h × P j hsuch that(E j (v h , p h ), (w h , q h )) :=( )v j h:=− vj−1 h, w h + (ν∇v j hk , ∇w h) + (v j h · ∇vj h , w h) − (p j h , div w h)j+ ( div v j h , q h) + SD δ (v j h , pj h , w h, q h ) − (f, w h ) = 0 ∀(w h , q h ) ∈ V j h × P j hwith stabilization)SD δ (v j h , pj h , w h, q h ) =(δ 1 (v j h · ∇vj h + ∇pj h − f), vj h · ∇w h + ∇q h+ (δ 2 div v j h , div w h) .The stabilization parametersδ 1 ={12 (k−2 jκ 1 h 2 j+ |v j h |2 h −2j ) −1/2 if ν < |v j h |h jotherwise, δ 2 ={κ 2 h jκ 2 h 2 jif ν < |v j h |h jotherwiseact as a subgrid model in the convection-dominated case ν < |v j h |h j, where h jdenotes the local (spatial) meshsize at time j and κ 1 and κ 2 are constants of unitsize.
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 15As discrete objective functional, we considerN∑∫∫J h (v h , p h ) = k j f 1 (x, v j h , ∇vj h , pj h )dx +j=1Ω=: J D,h (v h , p h ) + J T,h (v N h ).Ωf 2 (x, v N h )dxThis is exactly J(v h , p h ), since v h , p h are piecewise constant in time.In order <strong>to</strong> obtain gradients which are exact on the discrete level, we considerthe discrete Lagrangian functional based on the cG(1)dG(0) finite element method,which is given byN∑L h (v h , p h , λ h , µ h ) = J h (v h , p h ) + k j (E j (v h , p h ), (λ j h , µj h )).Note again that this is exactly L(v h , p h , λ h , µ h ), since v h , p h , λ h , µ h are piecewiseconstant in time.Now we take the derivatives of the discrete Lagrangian w.r.t. the state variables<strong>to</strong> obtain the discrete adjoint equation and w.r.t. the shape variables <strong>to</strong>obtain the reduced gradient.The discrete adjoint system can be cast in the <strong>for</strong>m of an implicit timesteppingscheme backward in time: For j = N − 1, . . .,0, find (λ j h , µj h ) ∈ V j h × P j hsuch thatj=1(λ j h , w h)k j+ (ν∇λ j h , ∇w h) + (µ j h , div w h) − (q h , div λ j h )+ (v j h · ∇w h, λ j h ) + (w h · ∇v j h , λj h ) + SD∗ δ (vj h , pj h , λj h , µj h ; w h, q h )= (λj+1 h, w h )k j− 1 k j〈J D,hv j h(v h , p h ), w h 〉 − 1 〈J D,h (v h , p h ), q h 〉k jwhere the discrete initial adjoint (λ N h , µ N h ) solves the systemλ N h · w hk N+ (ν∇λ N h , ∇w h) + (µ N h , div w h) + (v N h · ∇w h, λ N h )p j h∀(w h , q h ) ∈ V j h × P j h ,+ (w h · ∇v N h , λ N h ) − (q h , div λ N h ) + SDδ(v ∗ N h , p N h , λ N h , µ N h ; w h , q h )= − 1 〈J D,h (vk v N h , p h ), w h 〉 − 1 〈J T,h (v NN hk v N h ), w h 〉 − 1 〈J D,h (vN h k p N h , p h ), q h 〉N h<strong>for</strong> all (w h , q h ) ∈ V N h × P N h .
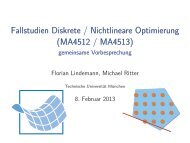
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 17(0,0.41)noslip(2.2,0.41)Γ inΓ BΓ out(0,0) noslip(2.2,0)Figure 1. DFG-Benchmark flow around a cylinder; sketch of the geometrywe arrive at an op<strong>timization</strong> problem with 14 design variables, 12 of which are free(2 design parameters are fixed as we have <strong>to</strong> ensure that the y-coordinates of thefirst and last B-spline curve points equal 0.2 in order <strong>for</strong> the curve <strong>to</strong> be closed).We compute the mean value of the drag on the object boundary Γ B over thetime interval [0, T] by using the <strong>for</strong>mulaJ((ṽ, ˜p), Ω) = 1 ∫ T ∫ ((ṽ t + (ṽ · ∇)ṽ −T˜f))T Φ − ˜p div Φ + ν∇ṽ : ∇Φ dxdt.0 Ω(5.1)Here, Φ is a smooth function such that with a unit vec<strong>to</strong>r φ pointing in the meanflow direction holdsΦ| ΓB ≡ φ, Φ| ∂Ω\ΓB ≡ 0 ∀ Ω ∈ O ad .This <strong>for</strong>mula is an alternative <strong>for</strong>mula <strong>for</strong> the mean value of the drag on Γ B ,c d := 1 ∫ T ∫n · σ(ṽ, ˜p) · φ dS,T 0 Γ Bwith normal vec<strong>to</strong>r n and stress tensor σ(ṽ, ˜p) = ν 1 2 (∇ṽ + (∇ṽ)T ) − ˜p I, andcan be obtained through integration by parts. For a detailed derivation, see [12].Integration by parts in the time derivative shows that (5.1) can also be written asJ((ṽ, ˜p), Ω) = 1 ∫ T ∫ (((ṽ · ∇)ṽ −T˜f))T Φ − ˜p div Φ + ν∇ṽ : ∇Φ dxdt0 Ω+ 1 ∫(5.1)(ṽ(x, T) − ṽ 0 (x)) T Φ(x)dx.TΩThus the drag functional (5.1) has the <strong>for</strong>m (3.6). Moreover, using the well knownembedding Y (Ω) ֒→ C(I; L 2 (Ω) d ) × L 2 0 (Ω) it is easy <strong>to</strong> see that (ṽ, ˜p) ∈ Y (Ω) ↦→J((ṽ, ˜p), Ω) is continuously differentiable if Φ ∈ W 1,∞ (R 2 ) 2 .Computation of the state, adjoint and shape derivative equations is doneusing Dolfin [14], which is part of the FEniCS project [7]. The op<strong>timization</strong> iscarried out using the interior point solver IPOPT [22], with a BFGS-approximation<strong>for</strong> the reduced Hessian.
18 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrich5.2. Choice of shape parameters and shape de<strong>for</strong>mation techniquesOne aspect <strong>to</strong> consider in the implementation of shape op<strong>timization</strong> algorithms isthe choice of the shape parameters and the shape de<strong>for</strong>mation technique. Generallyspeaking, shape parameterizations and de<strong>for</strong>mations fall in<strong>to</strong> two classes. Inthe first case, a parameterization directly defines the whole domain, which can beaccomplished by using, e.g., free <strong>for</strong>m de<strong>for</strong>mation. In the second case, the parameterizationdetermines the shape of the surface Γ B of the object B. Examples<strong>for</strong> this kind of parameterizations can be B-splines, NURBS, but also the set ofboundary points Γ B itself, if considered in an appropriate function space. Changesin the shape of the boundary Γ B then have <strong>to</strong> be transfered <strong>to</strong> changes of thedomain Ω ref . This can be done in various ways, see, e.g., [2].In our model problem, we have chosen a parameterization of the objectboundary Γ B based on closed cubic B-spline curves [16], where the B-spline controlpoints act as design parameters u. The trans<strong>for</strong>mation of boundary displacements<strong>to</strong> displacements of the domain is done by solving an elasticity equation, wherewe prescribe the displacement of the object boundary as inhomogeneous Dirichletboundary data [2]. The computational domains Ω k := Ω(τ(u k )) are obtained astrans<strong>for</strong>mations of a triangulation of the domain shown in Figure 1. As describedat the end of section 4 we use piecewise linear trans<strong>for</strong>mations <strong>to</strong> ensure a discreteanalogue of assumption (A). Then by an analogue of (3.9) <strong>to</strong>gether with thediscrete adjoint equation we obtained conveniently by a continuous adjoint calculusthe exact shape derivative on the discrete level – which we have also checkednumerically.5.3. ResultsThe IPOPT-algorithm needs 15 interior-point iterations <strong>for</strong> converging <strong>to</strong> a <strong>to</strong>leranceof 10 −3 , al<strong>to</strong>gether needing 17 state equation solves and 16 adjoint solves.The drag value in the optimal shape is reduced by nearly one third in comparison<strong>to</strong> the initial shape. In the optimal solution, bound constraints <strong>for</strong> 8 of the designparameters are active, while 6 are inactive. The results of the op<strong>timization</strong> processare summarized in Table 1.Figure 2 shows the velocity fields <strong>for</strong> the initial and optimal shape, withsnapshots taken at end time, while Figure 3 shows the computational mesh both <strong>for</strong>the initial and the optimal shape. Both meshes are obtained by a trans<strong>for</strong>mation ofthe same reference mesh with a circular object, cf. Figure 1, by solving an elasticityequation with fixed displacement of the object boundary.6. Conclusions and outlookIn this paper, we have presented a continuous adjoint approach that can easily betransferred in an exact way <strong>to</strong> the discrete level, if a Galerkin method in spaceis used. We use a domain representation of the shape gradient, since a boundaryrepresentation requires integration by parts, which is usually not justified on the
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 19iteration objective dual infeasibility linesarch-steps0 1.2157690e-1 1.69e+0 01 1.0209697e-1 1.53e+0 22 9.7036722e-2 3.60e-1 13 8.7039312e-2 6.44e-1 14 8.4563185e-2 5.08e-1 15 8.3512670e-2 1.01e-1 16 8.2813890e-2 1.22e-1 17 8.2516118e-2 8.96e-2 18 8.2069666e-2 1.42e-1 19 8.2062288e-2 1.39e-1 110 8.1995990e-2 1.80e-2 111 8.1994727e-2 6.55e-3 112 8.1995485e-2 2.76e-3 113 8.1995822e-2 2.72e-3 114 8.1995966e-2 1.32e-3 115 8.1995811e-2 2.66e-5 1Table 1. <strong>Op</strong><strong>timization</strong> Resultsdiscrete level. Nevertheless, adjoint based gradient representations can easily bederived from our gradient representation, e.g., <strong>for</strong> the boundary shape gradient infunction space, but also <strong>for</strong> shape parameterizations, <strong>for</strong> example free <strong>for</strong>m de<strong>for</strong>mationor parameterized boundary displacement. The proposed approach allowsthe solution of the state equation and adjoint equation on the physical domain.There<strong>for</strong>e existing solvers of the partial differential equation and its adjoint canbe used.We have applied our approach <strong>to</strong> the instationary incompressible Navier-S<strong>to</strong>kes equations. In the context of the stabilized cG(1)dG(0) method – but also<strong>for</strong> other Galerkin schemes and other types of partial differential equations – wewere able <strong>to</strong> derive conveniently the exact discrete shape derivative, since ourcalculus is exact on the discrete level, if some simple rules are followed.The combination with error estima<strong>to</strong>rs and multilevel techniques is subject ofcurrent research. Our results indicate that these techniques can reduce the numberof op<strong>timization</strong> iterations on the fine grids and the necessary degrees of freedomsignificantly. We leave these results <strong>to</strong> a future paper.References[1] K. K. Choi and N.-H. Kim, Structural Sensitivity Analysis and <strong>Op</strong><strong>timization</strong> 1: LinearSystems, Mechanical Engineering Series, Springer, 2005[2] K. K. Choi and N.-H. Kim, Structural Sensitivity Analysis and <strong>Op</strong><strong>timization</strong> 2: NonlinearSystems and Applications, Mechanical Engineering Series, Springer, 2005
20 C. Brandenburg, F. Lindemann, M. Ulbrich and S. UlbrichFigure 2. Comparison of the velocity fields <strong>for</strong> the initial andoptimal shape[3] M. C. Delfour and J.-P. Zolésio, <strong>Shape</strong>s and Geometries; Analysis, Differential Calculus,and <strong>Op</strong><strong>timization</strong>, SIAM series on Advances in Design and Control, 2001[4] K. Eriksson, D. Estep, P. Hansbo, and C. Johnson, Introduction <strong>to</strong> Adaptive Methods<strong>for</strong> Differential Equations, Acta Numerica, pp 105-158, 1995.[5] K. Eriksson, D. Estep, P. Hansbo, and C. Johnson, Computational Differential Equations,Cambridge University Press, 1996.[6] L. C. Evans Partial Differential Equations, Graduate Studies in Mathematics, AmericanMathematical Society, 1998[7] FEniCS, FEniCS Project, http//www.fenics.org/, 2007[8] P. Guillaume and M. Masmoudi, Computation of high order derivatives in optimalshape design, Numer. Math. 67, pp. 231-250, 1994[9] J. Haslinger and R. A. E. Mäkinen, Introduction <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong>: Theory,Approximation, and Computation, SIAM series on Advances in Design and Control,2003[10] J. G. Heywood, R. Rannacher and S. Turek, Artificial boundaries and flux and pressureconditions <strong>for</strong> the incompressible Navier-S<strong>to</strong>kes equations, Int. J. Numer. MethodsFluids 22, pp. 325–352, 1996.
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 21Figure 3. Comparison of the meshes <strong>for</strong> the initial and optimal shape[11] M. Hinze and K. Kunisch, Second order methods <strong>for</strong> optimal control of timedependentfluid flow, SIAM J. Control <strong>Op</strong>tim. 40, pp. 925–946, 2001.[12] J. Hoffman and C. Johnson, Adaptive Finite Element Methods <strong>for</strong> IncompressibleFluid Flow, Error estimation and solution adaptive discretization in CFD: LectureNotes in Computational Science and Engineering, Springer Verlag, 2002.
22 C. Brandenburg, F. Lindemann, M. Ulbrich and S. Ulbrich[13] J. Hoffman and C. Johnson, A New <strong>Approach</strong> <strong>to</strong> Computational Turbulence Modeling,Comput. Meth. Appl. Mech. Engrg. 195, pp. 2865–2880, 2006.[14] J. Hoffman, J. Jansson, A. Logg, G. N. Wells et. al., DOLFIN,http//www.fenics.org/dolfin/, 2006[15] B. Mohammadi and O. Pironneau, Applied <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Fluids, Ox<strong>for</strong>dUniversity Press, 2001[16] M. E. Mortensen, Geometric Modeling, Wiley, 1985[17] F. Murat and S. Simon, Etudes de problems d’optimal design, Lectures Notes inComputer Science 41, pp. 54–62, 1976.[18] J. Sokolowski and J.-P. Zolésio, Introduction <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong>, Series in ComputationalMathematic, Springer, 1992[19] R. Temam, Navier-S<strong>to</strong>kes Equations: Theory and Numerical Analysis 3rd Edition,Elsevier Science Publishers, 1984.[20] M. Schäfer and S. Turek, Benchmark Computations of Laminar Flow Around aCylinder, Preprints SFB 359, No. 96-03, Universität Heidelberg, 1996[21] M. Ulbrich, Constrained optimal control of Navier-S<strong>to</strong>kes flow by semismooth New<strong>to</strong>nmethods, Systems Control Lett. 48, pp. 297–311, 2003.[22] A. Wächter and L. T. Biegler, On the Implementation of a Primal-Dual InteriorPoint Filter Line Search Algorithm <strong>for</strong> Large-Scale Nonlinear Programming, Math.Program. 106, pp. 25-57, 2006.[23] W. P. Ziemer, Weakly Differentiable Functions, Graduate Texts in Mathematics,Springer, 1989Christian BrandenburgFachbereich MathematikTechnische Universität DarmstadtSchloßgartenstr. 764289 DarmstadtGermanye-mail: brandenburg@mathematik.tu-darmstadt.deFlorian LindemannLehrstuhl für Mathematische <strong>Op</strong>timierungZentrum Mathematik, <strong>M1</strong>TU MünchenBoltzmannstr. 385747 Garching bei Münchene-mail: lindemann@ma.tum.deMichael UlbrichLehrstuhl für Mathematische <strong>Op</strong>timierungZentrum Mathematik, <strong>M1</strong>TU MünchenBoltzmannstr. 385747 Garching bei Münchene-mail: mulbrich@ma.tum.de
<strong>Adjoint</strong> <strong>Approach</strong> <strong>to</strong> <strong>Shape</strong> <strong>Op</strong><strong>timization</strong> <strong>for</strong> Navier S<strong>to</strong>kes Flow 23Stefan UlbrichFachbereich MathematikTechnische Universität DarmstadtSchloßgartenstr. 764289 DarmstadtGermanye-mail: ulbrich@mathematik.tu-darmstadt.de