

Table of Contents - TG Drives
Table of Contents - TG Drives
Table of Contents - TG Drives

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
EXTENDED REGISTER GROUPS<br />
XENDAT,<br />
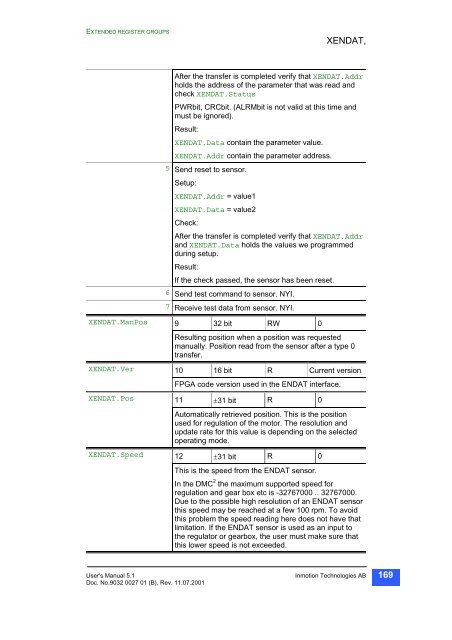
After the transfer is completed verify that XENDAT.Addr<br />
holds the address <strong>of</strong> the parameter that was read and<br />
check XENDAT.Status<br />
PWRbit, CRCbit. (ALRMbit is not valid at this time and<br />
must be ignored).<br />
Result:<br />
XENDAT.Data contain the parameter value.<br />
XENDAT.Addr contain the parameter address.<br />
5 Send reset<br />
to sensor.<br />
Setup:<br />
XENDAT.Addr = value1<br />
XENDAT.Data = value2<br />
Check:<br />
After the transfer is completed verify that XENDAT.Addr<br />
and XENDAT.Data holds the values we programmed<br />
during setup.<br />
Result:<br />
If the check passed, the sensor has been reset.<br />
6 Send test command to sensor. NYI.<br />
7 Receive test data from sensor. NYI.<br />
XENDAT.ManPos 9 32 bit RW 0<br />
Resulting position when a position was requested<br />
manually. Position read from the sensor after a type 0<br />
transfer.<br />
XENDAT.Ver 10 16 bit R Current version<br />
FPGA code version used in the ENDAT interface.<br />
XENDAT.Pos 11 ±31 bit R 0<br />
Automatically retrieved position. This is the position<br />
used for regulation <strong>of</strong> the motor. The resolution and<br />
update rate for this value is depending on the selected<br />
operating mode.<br />
XENDAT.Speed 12 ±31 bit R 0<br />
This is the speed from the ENDAT sensor.<br />
In the DMC 2 the maximum supported speed for<br />
regulation and gear box etc is -32767000 .. 32767000.<br />
Due to the possible high resolution <strong>of</strong> an ENDAT sensor<br />
this speed may be reached at a few 100 rpm. To avoid<br />
this problem the speed reading here does not have that<br />
limitation. If the ENDAT sensor is used as an input to<br />
the regulator or gearbox, the user must make sure that<br />
this lower speed is not exceeded.<br />
User's Manual 5.1 Inmotion Technologies AB<br />
Doc. No.9032 0027 01 (B), Rev. 11.07.2001<br />
169














