SS-R200, SS-CDR200 RS-232C documentation - Tascam
SS-R200, SS-CDR200 RS-232C documentation - Tascam SS-R200, SS-CDR200 RS-232C documentation - Tascam
RS-232C Protocol Specifications Rev. 1.00SS-CDR200/SS-R2003.3. Command SequenceIn most cases, the controlled device does not send an ACK command in response to a transport control commandor data preset command that is sent from an external controller.The controlled device sends a return command in response to a data sense command that requests the controlleddevice to return the controlled device's preset data values.If the controlled device switches from one state to another - from stop state to playback state, for example, or if anerror occurs, the controlled device sends a command to notify the external controller about the state transition.Examples of command sequences are shown below.Make sure that commands are sent at a minimum of 20-millisecond intervals.Example 1: Using a transport control of the controlled device (e.g. playback)When entering the playback state after receiving the playback command, the controlled device sendsthe CHANGE STATUS command.The controlled device does not send an ACK command in response to this command.External controllerCommandPLAY ->(preset to -1.0 %)Controlled deviceStatus of the controlleddeviceSets the pitch control data to-1.0%Example 3: Requesting currently set data (e.g. pitch control data)When receiving the PITCH CONTROL DATA PRESET (Sense) command, the controlled devicesends the set pitch control data.CommandStatus of the controlledExternal controllerControlled devicedevicePITCH CONTROL DATA->PRESET (Sense)
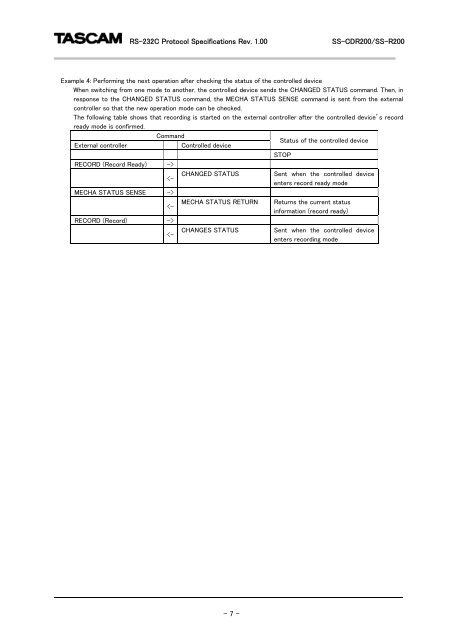
RS-232C Protocol Specifications Rev. 1.00SS-CDR200/SS-R200Example 4: Performing the next operation after checking the status of the controlled deviceWhen switching from one mode to another, the controlled device sends the CHANGED STATUS command. Then, inresponse to the CHANGED STATUS command, the MECHA STATUS SENSE command is sent from the externalcontroller so that the new operation mode can be checked.The following table shows that recording is started on the external controller after the controlled device’s recordready mode is confirmed.CommandStatus of the controlled deviceExternal controllerControlled deviceSTOPRECORD (Record Ready) ->CHANGED STATUSSent when the controlled deviceMECHA STATUS RETURN Returns the current statusCHANGES STATUSSent when the controlled device
- Page 1: RS-232C Protocol Specifications Rev
- Page 4 and 5: RS-232C Protocol Specifications Rev
- Page 8 and 9: RS-232C Protocol Specifications Rev
- Page 10 and 11: RS-232C Protocol Specifications Rev
- Page 12 and 13: RS-232C Protocol Specifications Rev
- Page 14 and 15: RS-232C Protocol Specifications Rev
- Page 16 and 17: RS-232C Protocol Specifications Rev
- Page 18 and 19: RS-232C Protocol Specifications Rev
- Page 20 and 21: RS-232C Protocol Specifications Rev
- Page 22 and 23: RS-232C Protocol Specifications Rev
- Page 24 and 25: RS-232C Protocol Specifications Rev
- Page 26 and 27: RS-232C Protocol Specifications Rev
- Page 28 and 29: RS-232C Protocol Specifications Rev
- Page 30 and 31: RS-232C Protocol Specifications Rev
- Page 32 and 33: RS-232C Protocol Specifications Rev
- Page 34 and 35: RS-232C Protocol Specifications Rev
<strong>RS</strong>-<strong>232C</strong> Protocol Specifications Rev. 1.00<strong>SS</strong>-CD<strong>R200</strong>/<strong>SS</strong>-<strong>R200</strong>Example 4: Performing the next operation after checking the status of the controlled deviceWhen switching from one mode to another, the controlled device sends the CHANGED STATUS command. Then, inresponse to the CHANGED STATUS command, the MECHA STATUS SENSE command is sent from the externalcontroller so that the new operation mode can be checked.The following table shows that recording is started on the external controller after the controlled device’s recordready mode is confirmed.CommandStatus of the controlled deviceExternal controllerControlled deviceSTOPRECORD (Record Ready) ->CHANGED STATU<strong>SS</strong>ent when the controlled deviceMECHA STATUS RETURN Returns the current statusCHANGES STATU<strong>SS</strong>ent when the controlled device


