

1756-RM001B-EN-P, Using ControlLogix in SIL2 ... - Tuv-fs.com
1756-RM001B-EN-P, Using ControlLogix in SIL2 ... - Tuv-fs.com
1756-RM001B-EN-P, Using ControlLogix in SIL2 ... - Tuv-fs.com
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
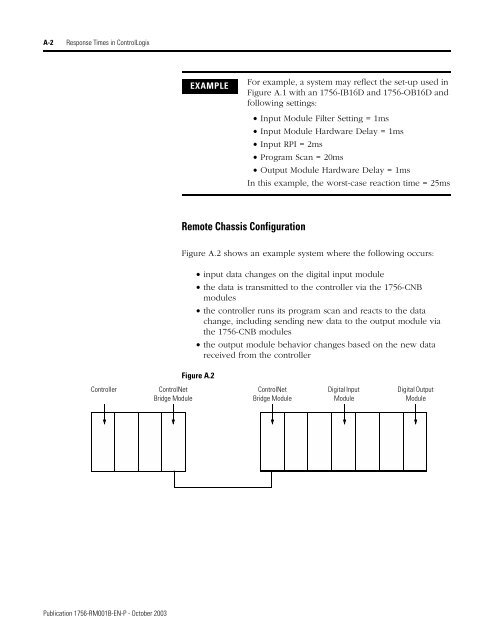
A-2 Response Times <strong>in</strong> <strong>ControlLogix</strong>EXAMPLEFor example, a system may reflect the set-up used <strong>in</strong>Figure A.1 with an <strong>1756</strong>-IB16D and <strong>1756</strong>-OB16D andfollow<strong>in</strong>g sett<strong>in</strong>gs:• Input Module Filter Sett<strong>in</strong>g = 1ms• Input Module Hardware Delay = 1ms• Input RPI = 2ms• Program Scan = 20ms• Output Module Hardware Delay = 1msIn this example, the worst-case reaction time = 25msRemote Chassis ConfigurationFigure A.2 shows an example system where the follow<strong>in</strong>g occurs:• <strong>in</strong>put data changes on the digital <strong>in</strong>put module• the data is transmitted to the controller via the <strong>1756</strong>-CNBmodules• the controller runs its program scan and reacts to the datachange, <strong>in</strong>clud<strong>in</strong>g send<strong>in</strong>g new data to the output module viathe <strong>1756</strong>-CNB modules• the output module behavior changes based on the new datareceived from the controllerFigure A.2ControllerControlNetBridge ModuleControlNetBridge ModuleDigital InputModuleDigital OutputModulePublication <strong>1756</strong>-<strong>RM001B</strong>-<strong>EN</strong>-P - October 2003














