Binary Vision
Binary Vision
Binary Vision
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
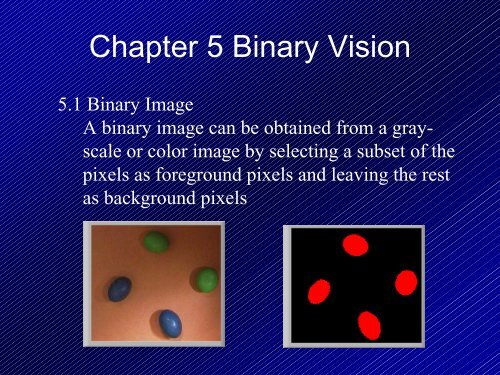
Chapter 5 <strong>Binary</strong> <strong>Vision</strong>5.1 <strong>Binary</strong> ImageA binary image can be obtained from a grayscaleor color image by selecting a subset of thepixels as foreground pixels and leaving the restas background pixels
Thresholding based on histogramCompute Histogram H of gray-level image Iprocedure histogram (I,H) {“Initialize all bins to zero”for i:=0 to MaxValH[i]:=0;“Compute values”for L:=0 to MaxRowfor P:=0 to MaxCol {grayval:= I[L,P];H[grayval]:= H[grayval] + 1;}}
5.2 MaskApplying a mask to an image is a basic concept in imageprocessing – convolution.(1) What is a mask: A mask is a set of pixel positions withvalues called weights. A 3x3 mask is as follows.w1 w2 w3w4 w5 w6w7 w8 w91 w2 w31 1 1111w4 w5 w61 1 1w7 w8 w91 w2 w31 2 1242w4 w5 w61 2 1w7 w8 w9
(2) How to use a mask:For any point (x,y) in the image, align the centerof the mask to it. We havefnew( x,y)=9∑ wi=1iziz1 z 2 z3w1 w2 w3z 4 z5 z 6w4 w5 w6z 7 z8 z9w7 w8 w9(x,y)
5.3 Counting objectsApplications: E.g., count cells in biology, particles in materialsparticles in metal cells in biology
5.3 Counting objects -- method 1Method 1:0 00 01 00 10 11 00 00 0E Masks (1 – foreground, 0 – background)for detecting external corners1 11 10 11 01 00 11 11 1I Masks (1 – foreground, 0 – background)for detecting internal corners
5.3 Counting objects -- method 1Compute the number of foreground objects in binary image BCount_objects (B) {E := 0;I := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1 {if external_match (L,P) then E := E + 1;if internal_match (L,P) then I := I + 1;}return ((E-I)/4);}
5.3 Counting objects -- method 1Limitations:• must be 4-connected foregrounds• no interior holes
5.3 Counting objects -- method 2Connected Components Labelling:A connected components labeling of abinary image is a labeled image in which thevalue of each pixel is the label of itsconnected componentsExample =>
5.3 Counting objects -- method 2
5.3 Counting objects -- method 2A Recursive Labelling Algorithm:Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}Find_components (LB, label) {for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {label := label + 1;search (LB, label, L P);}}
5.3 Counting objects -- method 2A Recursive Labelling Algorithm:Find_components (LB, label) {for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {label := label + 1;search (LB, label, L, P);}}21x434-neighborhood1 2 34 x 5search (LB, label, L, P) {LB[L,P] := label;6 7 8Nset := neighbors (L, P);For each [L’, P’] in Nset {8-neighborhoodIf LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}Find_components (LB, label) {for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {label := label + 1;search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 1 1 1 0 0 00 0 0 0 0 1 0 1 0 1 10 0 0 0 0 1 0 1 0 0 00 0 1 1 0 1 1 1 0 0 00 1 0 1 0 1 0 1 0 0 00 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}-1 0 0 0 0 0 0 0 0 0 0-1 -1 0 0 0 -1 -1 -1 0 0 0Find_components (LB, label) {0 0 0 0 0 -1 0 -1 0 -1 -1for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 10 0 0 0 0 -1 0 -1 0 0 0if LB[L,P] == -1 then {label := label + 1;0 0 -1 -1 0 -1 -1 -1 0 0 0search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {000-100000-1-10000-100000-10000000-1000If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}1 0 0 0 0 0 0 0 0 0 0-1 -1 0 0 0 -1 -1 -1 0 0 0Find_components (LB, label) {0 0 0 0 0 -1 0 -1 0 -1 -1for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 10 0 0 0 0 -1 0 -1 0 0 0if LB[L,P] == -1 then {label := label + 1;0 0 -1 -1 0 -1 -1 -1 0 0 0search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {000-100000-1-10000-100000-10000000-1000If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}1 0 0 0 0 0 0 0 0 0 01 -1 0 0 0 -1 -1 -1 0 0 0Find_components (LB, label) {0 0 0 0 0 -1 0 -1 0 -1 -1for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 10 0 0 0 0 -1 0 -1 0 0 0if LB[L,P] == -1 then {label := label + 1;0 0 -1 -1 0 -1 -1 -1 0 0 0search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {000-100000-1-10000-100000-10000000-1000If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 -1 -1 -1 0 0 0Find_components (LB, label) {0 0 0 0 0 -1 0 -1 0 -1 -1for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 10 0 0 0 0 -1 0 -1 0 0 0if LB[L,P] == -1 then {label := label + 1;0 0 -1 -1 0 -1 -1 -1 0 0 0search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {000-100000-1-10000-100000-10000000-1000If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 -1 -1 0 0 0Find_components (LB, label) {0 0 0 0 0 -1 0 -1 0 -1 -1for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 10 0 0 0 0 -1 0 -1 0 0 0if LB[L,P] == -1 then {label := label + 1;0 0 -1 -1 0 -1 -1 -1 0 0 0search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {000-100000-1-10000-100000-10000000-1000If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 -1 0 0 0Find_components (LB, label) {0 0 0 0 0 -1 0 -1 0 -1 -1for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 10 0 0 0 0 -1 0 -1 0 0 0if LB[L,P] == -1 then {label := label + 1;0 0 -1 -1 0 -1 -1 -1 0 0 0search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P);For each [L’, P’] in Nset {000-100000-1-10000-100000-10000000-1000If LB[L’, P’] == -1 then search (LB, label, L’, P’);}}
5.3 Counting objects -- method 2Recursive_connected_components (B, LB) {LB := negate (B);Label := 0;Find_components (LB, label);Print (LB);}Find_components (LB, label) {for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {label := label + 1;search (LB, label, L, P);}}search (LB, label, L, P) {LB[L,P] := label;Nset := neighbors (L, P); Problem: ??For each [L’, P’] in Nset {If LB[L’, P’] == -1 then search search (LB, label, L’, P’);}}1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 2 0 2 0 0 00 0 4 4 0 2 2 2 0 0 00 4 0 4 0 2 0 2 0 0 00 0 0 4 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 5 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 1 1 1 0 0 00 0 0 0 0 1 0 1 0 1 10 0 0 0 0 0 0 1 0 0 00 0 1 1 0 1 1 1 0 0 00 1 0 1 0 1 0 1 0 0 00 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);-1 0 0 0 0 0 0 0 0 0 0-1 -1 0 0 0 -1 -1 -1 0 0 00 0 0 0 0 -1 0 -1 0 -1 -10 0 0 0 0 0 0 -1 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 0-1 -1 0 0 0 -1 -1 -1 0 0 00 0 0 0 0 -1 0 -1 0 -1 -10 0 0 0 0 0 0 -1 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 -1 -1 -1 0 0 00 0 0 0 0 -1 0 -1 0 -1 -10 0 0 0 0 0 0 -1 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 -1 -1 0 0 00 0 0 0 0 -1 0 -1 0 -1 -10 0 0 0 0 0 0 -1 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 -1 0 -1 0 -1 -10 0 0 0 0 0 0 -1 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 0 0 -1 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 0 0 2 0 0 00 0 -1 -1 0 -1 -1 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 0 0 2 0 0 00 0 4 4 0 5 2 -1 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 0 0 2 0 0 00 0 4 4 0 5 2 2 0 0 00 -1 0 -1 0 -1 0 -1 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 0 0 2 0 0 00 0 4 4 0 5 2 2 0 0 00 4 0 4 0 5 0 2 0 0 00 0 0 -1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 -1 0
5.3 Counting objects -- method 3Classical Connected Components AlgorithmMakes two passes over the imageClassical_connected_components (B, LB) {LB := negate (B);Label := 0;for L:= 0 to MaxRow - 1for P:= 0 to MaxCol - 1if LB[L,P] == -1 then {if L_LAset 0 then{LB[L,P] = Label of LAset}else {label := label + 1;LB[L,P] := label;}}}Print (LB);1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 2 2 2 0 0 00 0 0 0 0 2 0 2 0 3 30 0 0 0 0 0 0 2 0 0 00 0 4 4 0 5 2 2 0 0 00 4 0 4 0 5 0 2 0 0 00 0 0 4 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 6 0Problem: overlapping of objectsdue to segmentation error
5.4 <strong>Binary</strong> MorphologyFunction: Extract and alter the structure of objectsin a binary image.Why?<strong>Binary</strong> image is obtained from thresholding. Itcontains unwanted information, such as noisyparticles, objects touching each other, and etc.Morphological operations can address or alleviatethese problems.
5.4 <strong>Binary</strong> MorphologyIllustration?<strong>Binary</strong> image is obtained from thresholding. Itcontains unwanted information, such as noisyparticles, objects touching each other, and etc.Morphological operations can address or alleviatethese problems.