Basic Principles of Homing Guidance - The Johns Hopkins ...
Basic Principles of Homing Guidance - The Johns Hopkins ...
Basic Principles of Homing Guidance - The Johns Hopkins ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
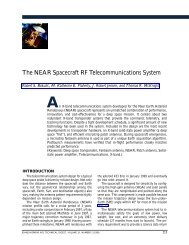
N. F. PALUMBO, R. A. BLAUWKAMP, and J. M. LLOYD = cos –1a c a M Missileacceleration bodydefinitions: _ 1 ris a unit vector along the missile–targetLOS, _ 1 xis a unit vector along the missile centerline(missile longitudinal axis), _ a cis the guidance lawacceleration_command perpendicular to the LOS, andaM = [a Mxa Mya Mz] T is the achieved missile accelerationvector comprising components in the x/y/z axes.Two component directions serve as a basis for thedevelopment <strong>of</strong> GCP1: the direction <strong>of</strong> the LOS ( _ 1 r)and the commanded guidance direction ( _ 1 ac= _ a c/ _ a c).Assuming perfect interceptor response to commandedacceleration (i.e., no lag from commanded to achievedacceleration), the (guidance preserved) missile accelerationcan be expressed as follows:_aM = k 1_1r + k 2_1ac . (43)<strong>The</strong> design parameters, k 1and k 2, are determined subjectto the following constraints:a : 1 = aa : 1 = aM x MxMa cc.(44)Equations 44 analytically embody the following constraints:(i) the missile does not control longitudinalacceleration and (ii) the component <strong>of</strong> missile accelerationalong the guidance direction, _ 1 ac, must be thatspecified by the guidance law ( _ a c). Using Eqs. 43 and44 and given _ 1 r• _ 1 ac= 0 (i.e., the guidance commandis perpendicular to the LOS), an expression for commandedmissile acceleration that will preserve the guidancecommand is given in Eq. 45:aGLaMx – ac : 1x= e o 1 a .1 : 1r +c(45)rx1 r1 xLOSMissilecenterlinea M a c PN guidance command LOSa M Achieved missile accelerationFigure 15. GCP1. <strong>The</strong> LOS vector is shown along with the commandedacceleration from PN, which is perpendicular to the LOS.Also, the missile centerline (direction <strong>of</strong> the missile nose) andachieved missile acceleration vector are superimposed. <strong>The</strong> guidancepreservation problem is to achieve missile acceleration thathas the component along the guidance direction as specified bythe guidance law.Equation 45 is derived independently from any particularcoordinate system. It is easy to mechanize the expressionin Eq. 45 such that the computations are carried outin the missile body frame (B). We first note that missileacceleration resolved into the missile body frame cana MBBMxBMyB TMzbe expressed as = [ a a a ] and that thebody-referenced unit vector along the longitudinal axis<strong>of</strong> the missile can be written as _ 1B x= [1 0 0] T . <strong>The</strong>quantities _ 1 r(LOS unit vector) and _ a c(guidance lawcommand) usually are defined with respect to a guidancereference _ frame. To reflect this fact, we expressthem as 1G r= [1 0 0] T _and acG= [0 aG cya G cz] T .Here, the superscript denotes the frame <strong>of</strong> referencewith which the quantities are currently expressed; inthis case, the guidance reference frame (G). Thus, wemust resolve all guidance frame quantities into themissile body frame through the coordinate transformationCB G_= c B G(i, j), i, j = 1, 2, 3; for example, 1rB=C B G[1 0 0] T ≡ [c B G(1, 1) c B G(2, 1) c B G(3, 1)] T . Note thatif we fix the guidance frame at the start <strong>of</strong> terminalhoming (t = 0), we obtain the transformation CG I=C B I(C BS t = 0). <strong>The</strong> inertial-to-body transformation, C B I,comes from the IMU, and CSBmay be computed via theseeker gimbals (see Eq. 23). Subsequently, CB G= C B I(C G I) T .If necessary, the guidance frame may be updated frominstant to instant, but this adds computational complexity.Given that CB Gis available, the following mechanization<strong>of</strong> Eq. 45 is possible:aBGCBBaMx– ac: 1x= rBaBfrBB p +c: 1xR V RB c ( 1, 1)aa – a S W SMx cx/ f c ( 2, 1)aB pSW + ScG( 1, 1)SSc( 3, 1)W SaT X TBB G B G B cxBBG B cyBczVWW .WWX(46)In Eq. 46, [aBcxaB cya B cz] T is the guidance commandvector expressed in the missile body frame. This mechanizationwill generate guidance commands in the missilebody frame that satisfy the constraints in Eq. 44.MIDCOURSE GUIDANCESo far, this article has been chiefly concerned withthe requirements <strong>of</strong> terminal homing, wherein targetmeasurements are provided by one or more onboard terminalsensors and minimizing miss distance at interceptis the primary objective. For completeness’ sake, we nowwill briefly discuss issues and requirements associatedwith the midcourse phase <strong>of</strong> flight.During the midcourse guidance phase <strong>of</strong> a multimodemissile (see Fig. 16), target tracking is performedby an external sensor to support the engagement. 6 Externaltracking relaxes the requirements for the onboardsensor to point at the target and detect it at large ranges.38JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 29, NUMBER 1 (2010)