AST242 LECTURE NOTES PART 3 Contents 1. Viscous flows 1 1.1 ...
AST242 LECTURE NOTES PART 3 Contents 1. Viscous flows 1 1.1 ...
AST242 LECTURE NOTES PART 3 Contents 1. Viscous flows 1 1.1 ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3<strong>Contents</strong><strong>1.</strong> <strong>Viscous</strong> <strong>flows</strong> 2<strong>1.</strong><strong>1.</strong> The velocity gradient tensor 2<strong>1.</strong>2. <strong>Viscous</strong> stress tensor 3<strong>1.</strong>3. Navier Stokes equation – diffusion 5<strong>1.</strong>4. Viscosity to order of magnitude 6<strong>1.</strong>5. Example using the viscous stress tensor: The force on a moving plate 6<strong>1.</strong>6. Example using the Navier Stokes equation – Poiseuille flow or Flow in acapillary 7<strong>1.</strong>7. <strong>Viscous</strong> Energy Dissipation 82. The Accretion disk 102.<strong>1.</strong> Accretion to order of magnitude 142.2. Hydrostatic equilibrium for an accretion disk 152.3. Shakura and Sunyaev’s α-disk 172.4. Reynolds Number 172.5. Circumstellar disk heated by stellar radiation 182.6. <strong>Viscous</strong> Energy Dissipation 202.7. Accretion Luminosity 213. Vorticity and Rotation 243.<strong>1.</strong> Helmholtz Equation 253.2. Rate of Change of a vector element that is moving with the fluid 263.3. Kelvin Circulation Theorem 283.4. Vortex lines and vortex tubes 303.5. Vortex stretching and angular momentum 323.6. Bernoulli’s constant in a wake 333.7. Diffusion of vorticity 343.8. Potential Flow and d’Alembert’s paradox 343.9. Burger’s vortex 364. Rotating Flows 384.<strong>1.</strong> Coriolis Force 384.2. Rossby and Ekman numbers 394.3. Geostrophic <strong>flows</strong> and the Taylor Proudman theorem 394.4. Two dimensional <strong>flows</strong> on the surface of a planet 411
2 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 34.5. Thermal winds? 425. Acknowledgments 42<strong>1.</strong> <strong>Viscous</strong> <strong>flows</strong>Up to this time we have ignored viscosity. The most common astrophysical applicationof viscosity is the accretion disk, so we will introduce viscosity specifically tostudy viscous evolution of accretion disks.We showed earlier that conservation of momentum could be written as(1)∂(ρu)∂t+ ∇ · π = −ρ∇Φwith stress tensor π ij = pδ ij +ρu i u j giving the momentum flux. We now consider themomentum flux caused by viscosity and add this viscous stress tensor to the stresstensor above coming from bulk flow and pressure.As we discussed earlier the ij component of the stress tensor is the i-th componentof the force per unit area on a surface with normal in the j direction. The ijcomponent of the stress tensor is also the i-th component of the momentum densitythrough a surface with normal in the j direction.<strong>1.</strong><strong>1.</strong> The velocity gradient tensor. If there is no gradient in velocity then weexpect no stress. We expect viscous forces to depend on the gradient of the velocity,∇u, however this is a 2 index tensor as each component is ∂u i∂x j. It can be describedas a 3 × 3 matrix, each index covering xyz. We can decompose the gradient of thevelocity into three components: a traceless symmetric component, σ, a tracelessrotation component, r, and a component that has the trace θ;(2) ∇u = 1 3 θg + σ + rwhere g is the tensor δ ij and(3)(4)(5)θ = ∇ · uσ ij = 1 ( ∂ui+ ∂u )j− 1 2 ∂x j ∂x i 3 θδ ijr ij = 1 ( ∂ui− ∂u )j2 ∂x j ∂x iWe explain why the tensor r is equivalent to solid body rotation of the fluid elementand so should not cause any viscous stress. For a body in solid body rotation with
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 3angular velocity Ω the velocity at each point is u = Ω × r or using summationnotation(6) u i = ɛ ijk Ω j x kwhere ɛ ijk is the Levi-Civita symbol (see http://en.wikipedia.org/wiki/Levi-Civita symbol).Let’s be specific about he Levi-Civita symbol⎧⎨ 0,any two labels are the same(7) ɛ ijk = 1, if i, j, k is an even permutation of 1, 2, 3⎩−1,i, j, k is an odd permutation of 1, 2, 3Any cross product A = B × C can be written(8) A i = ɛ ijk B j C kwhere summation notation means any repeated index is summed over all coordinates.Taking the derivative of equation (6)(9)∂u i∂x j= ɛ ikl Ω k∂x l∂x j= ɛ ikl Ω k δ lj = ɛ ikj Ω kThis is antisymmetric. Let us take this expression for u i,j and with it create anantisymmetric tensor like r(1 ∂ui− ∂u )j= 1 2 ∂x j ∂x i 2 (ɛ ikj − ɛ jki ) Ω k(10)= 1 2 (ɛ ikj + ɛ ikj ) Ω k= ɛ ikj Ω kHow many degrees of freedom does an antisymmetric 3 × 3 matrix have? Thediagonal terms must be zero. There are 6 non-diagonal terms and they must comein pairs, positive and negative. Therefore there are 3 degrees of freedom. There arealso three components of the vector Ω. This means that any r can be described interms of a solid body rotation with(11) r ij = ɛ ikj Ω kBecause our antisymmetric tensor r describes the solid body rotational fluid motion,it can cause no viscous stress.<strong>1.</strong>2. <strong>Viscous</strong> stress tensor. It has been found experimentally that the magnitudeof the shear stress in viscous <strong>flows</strong> is often proportional to the symmetric componentsof the velocity gradient. This is an analogy to Hooke’s law. In other words(12) T visc approximately ∝ ∇v
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 5We can then write(16) ∇T visc ∼ −(ζ + η/3)∇(∇ · u) − η∇ 2 u.Assuming incompressible flow (so ∇ · u = 0) and inserting this component of thestress tensor into our equation for conservation of momentum we find(17)where∂u∂t + (u · ∇)u = −1 ρ ∇p + ν∇2 u(18) ν ≡ η ρis the kinematic viscosity and we have assumed that ν does not vary with positionin the fluid. The above equation is known as the Navier-Stokes equation. Let us bespecific about the components. For the i-th component of this equation the viscosityterm looks like(19) ν ∑ j∂ 2 u i∂x 2 jIf the flow is compressible then more generally(20) ρ DuDt = −∇p + (ζ + η/3)∇(∇ · u) + η∇2 uthough extra terms can be added if η and ζ are dependent on position.Note that the addition of second order derivatives means that integrations requireadditional boundary conditions. Viscosity is a form of energy dissipation. When viscosityis important there is a corresponding term in the energy conservation equationthat depends on the viscosity and gradients of the velocity.<strong>1.</strong>3. Navier Stokes equation – diffusion. Consider the Navier Stokes equation(21)∂u∂t + (u · ∇)u = −1 ρ ∇p + ν∇2 uConsider a region with a really steep velocity gradient. The second derivatives dominatethe first ones and(22)∂u∂t ∼ ν∇2 uThis can be recognized as a diffusion equation with the kinematic viscosity, ν, thecoefficient of diffusion. Viscosity tends to reduce velocity gradients.
6 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3<strong>1.</strong>4. Viscosity to order of magnitude. Note that the kinematic viscosity, ν, hasunits cm 2 /s like a diffusion coefficient. For a gas it can be approximated as v 2 τ orλ 2 /τ or vλ where v is a mean thermal velocity, τ the collision timescale and λ themean free path. For a turbulent medium one can use a mean eddy velocity andlength scale.Figure 2. Two flat plates separated by a small distance, h, that isfilled with a viscous fluid. A force applied to the top plate allows it tomove. The force depends on the viscosity of the fluid.<strong>1.</strong>5. Example using the viscous stress tensor: The force on a moving plate.A plate h = 0.01 cm from a fixed plate moves at a velocity of v =100 cm/s. Inbetween the two flat plates is a fluid with dynamic viscosity of water or 8.9 ×10 −3Pa s. In cgs 1 Poise = 0.1 Pa s. So in cgs the dynamic viscosity is 8.9 ×10 −4 Poise.What is the force per unit area needed to maintain this velocity?We take x in the direction that we are pushing the plate and z the directionperpendicular to the plates. We can let z = 0 at the bottom plate and z = 0.01 cmat the top plate. The fluid velocity where it touches the plate should be the same asthe plate.(23) u = (v z , 0, 0)hWe can assume the bottom plate is not moving so has u x = 0 and the top plate ismoving at u x = 100cm/s. The gradient of the x component of velocity∂u x(24)∂z = v h = 100cm/s0.01cm = 104 s −1Let’s consider the traceless symmetric part of the velocity gradient σ. We haveno motion in the z or y directions. The gradients in the x and y direction of u x arezero. The only part of σ that is non-zero is the part containing ∂ux . ∂zThe viscous stress tensor gives the components of the force per unit area througha surface. Consider component T xz of the viscous stress tensor. This gives the forceper unit area in the x direction through a surface oriented with normal along the zdirection. Ignoring terms containing ∇ · u which is zero if the fluid is incompressible(25) T visc = −2ησ
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 7As the only gradient of the velocity that is non-zero is ∂ux so we know that T∂z xx =T yy = T zz = T yz = T xy = 0. We now compute T xz(26) T xz = −2ησ xz = −2η 1 2( ∂ux∂z + ∂u z∂x)= −η ∂u x∂zUsing the dynamic viscosity of water and our velocity gradient we find thatF(27)A = T visc,xz = −η ∂u100= −8.9 × 10−4 = −8.9 dynes cm−2∂x 0.01where the sign is in the direction opposite to the flow; the fluid opposes the velocityshear.Figure 3. Flow of blood in a capillary that induced by a pressure gradient.<strong>1.</strong>6. Example using the Navier Stokes equation – Poiseuille flow or Flowin a capillary. Consider the viscous flow of blood in a capillary. Supposing there isa constant pressure gradient ∇P along the capillary of radius a. We orient our coordinatesystem so the capillary extends along the z direction. We assume cylindricalsymmetry. We would like to find the velocity profile u(r). We assume there is onlyflow in the z direction and the flow is steady. We have a boundary condition u = 0at r = a. Here is a summary of boundary conditions and assumptions(28) ∇P = dPdz ẑ(29)u = u(r) ẑ(30)(31)(32)(33)u(r = a) = 0∂u∂z= 0∂u∂t= 0∂u∂φ = 0
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 9gives the j-th force component per unit area on a surface with normal ˆn or equivalentlythe flux of the j-th component of momentum through a surface with normalˆn. Work is force times distance, so(42) Ads = T · ndsis the work per unit area pushing on the surface as it moves a distance ds and(43) B = T · u with B j = T ij u iis the work per unit area per unit time for the surface moving with the fluid. ThusT · u is an energy flux.Our viscous stress tensor represents an additional momentum flux which can dowork on the fluid at a rate T visc · u per unit area. A work per unit area is also anenergy flux. There is an energy flux caused by viscous dissipation(44) F visc = T visc · u or F visc,i = T ij u jThis energy flux is a vector and has units of energy per unit area per unit time.The gradient of this energy flux will give us the energy dissipated per unit volumeper unit time. Sometimes you hear the energy flux described as stress times strain.Our equation for energy conservation gains a flux term(45) ∇ · (T visc · u)with T vis = −ζθg − 2ησ. Our conservation of energy equation becomes(46)∂E∂t + ∇ · [(E + p)u + T visc · u] = −ρ ˙Q cool + ρ ∂Φ∂t − ∇ · hIn the above E is the total energy per unit volume. Here ˙Q cool is the cooling rateper unit mass, h is the heat flux due to thermal conductivity (energy per unit areaper unit time).To make it clearer how much energy is due to viscous dissipation we would like tofind T dS/dt due to viscous heating. Consider our conservation equation for conservationof momentum∂(ρu)(47)+ ∇ · (pg + ρu ⊗ u + T visc ) = −ρ∇Φ∂tIf we take the dot product of u times the conservation law for momentum aboveand subtract it from our equation for energy conservation (equation 46) we find(48) ρT dSdt = −T visc : ∇u − ρ ˙Q cool + ρ ∂Φ∂t − ∇ · hOur viscous stress tensor is negative so we get a positive heating rate. In the aboveform it may be clearer that the heating rate is the stress (T) times the strain, (∇u).
10 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3We have assumed that the viscous stress tensor is a constant times the strain. Therate of heating can be written then as a viscosity coefficient times a square of thestrain. The form of the viscous dissipation term(49) T visc : ∇u = ∑ ijT ij∂u i∂x jwhere I have been specific about the indices.More specifically ∇u = 1 gθ + σ + r where the trace θ = ∇ · u, and σ is the3symmetric traceless component. The antisymmetric component, r, can be describedin terms of the rotation or vorticity and g ij = δ ij for a Cartesian coordinate system.Inserting our form for the viscous stress tensor (equation 14)( )(50) ρ ˙Q θgvisc = −T visc : ∇u = (ζθg + 2ησ) :3 + σ + rThe antisymmetric term with r drops out of the sum by symmetry. Consider thedouble sum of a trace term with a traceless term(51) θg : σ = θ ∑ δ ij σ ij = θ ∑ iσ ii = 0where the last step follows because σ has zero trace. Because of the double dot, atrace part on the left requires a non-zero trace term on the right (and vice versa) togive a non-zero term. Consequently(52) ρ ˙Q visc = ζθ 2 + 2ησ : σwhere(53) σ : σ = ∑ ijσ ij σ ij = trace ω 2As ω is symmetric it can be diagonalized and the trace of its square is the sumof 3 positive numbers, so σ : σ ≥ 0. This implies that ˙Q visc ≥ 0 as expected fordissipation. We can write ρ ˙Q visc out as(54) ρ ˙Q visc = ζ( ∑i∂u i∂x i) 2+ η ∑ i≠j[ ( ) ]2 ∂ui+ ∂u i ∂u j∂x j ∂x j ∂x i2. The Accretion diskWe consider the setting of a disk comprised of gas rings, each in circular rotationaround a massive object such as a black hole or star or planet. We use a cylindricalcoordinate system R, φ, z and assume that the disk is vertically thin. We assume
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 11Figure 4. In a rotating Keplerian disk, the angular rotation ratedrops with increasing radius, giving a velocity shear. This gives aviscous stress that drives radial flow.that velocity u, and density ρ are independent of φ so the system is axisymmetric.Integrating the gas density, ρ, vertically(55) Σ(R, t) =∫ ∞∞ρ(R, z, t)dzwhere Σ(R, t) describe the mass surface density (mass per unit area) in the disk.With the assumption of a thin disk we can also integrate the velocity componentsalong the vertical direction describing the velocity in two dimensions as(56) u = u R ˆR + uφ ˆφWe can start by assuming that the disk is low mass compared to a central objectof mass M. The velocity of a particle in a circular orbit√GM(57) v c (R) =Rand angular rotation rate, Ω(R)(58) Ω(R) = ˙φ = v √c GMR = R 3Because Ω depends on radius, there is differential rotation and gas rings experienceviscous stress that can transfer angular momentum between rings, causing radialinflow or outflow of gas. We will describe the viscosity with a kinematic viscosity ν.We consider thin disks with rotation that is nearly Keplerian(59) u φ ∼ v c
12 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3and assume that(60) |u R | ≪ |u φ |With similar formalism we can consider a disk embedded in a galaxy or take intoaccount the self-gravity of the gas disk itself. In these cases v c and Ω can still befunctions of radius but it would be a different function than given in equations 57and 58.Assuming axisymmetry (no φ dependence) the continuity equation (conservationof mass) becomes(61)The Navier-Stokes equation(62)∂Σ∂t + 1 ∂R ∂R (RΣu R) = 0∂u∂t + (u · ∇)u = −1 ρ ∇P − ∇Φ + ν∇2 uWe expect both gravity and pressure to have gradients proportion to ˆr. The φcomponent of the Navier-Stokes equation in cylindrical polar coordinates becomes( ∂uφ(63) Σ∂t + u ∂u φR∂R + u )Ru φ= ∂ (νΣ ∂u )φ+ 1 ∂R ∂R ∂R R ∂R (νΣu φ) − νΣu φR 2There is no pressure or gravity derivatives because the above is the φ componentthough the tangential velocity will depend on the gravitational potential. All termson the right hand side contain the viscosity and so are due to viscous stress.It is useful to rewrite the above equation in terms of Ω = u φ /R. Combining thecontinuity equation (times Ru φ ) and the above (times R) we find∂(64)∂t (RΣu φ) + 1 (∂ ( )R 2 1 ∂Σu φ u R = νR 3 Σ dΩ )R ∂RR ∂R dRAngular momentum per unit area is(65) l = ΣRu φso the first term is the rate of change of the angular momentum per unit area.The second term is the radial flux of the angular momentum per unit area due toadvection at velocity u R . So we can write equation 64 as∂l(66)∂t + 1 ∂R ∂R (Rlu R) = 1 (∂νR 3 Σ dΩ )R ∂R dRThe right hand side describes the torque due to viscosity.Let’s consider the viscous stress tensor. The only component of it that we need isthe T visc,Rφ component that depends on the velocity shear due to differential rotation.This is the gradient of the tangential velocity component in the radial direction. If
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 13the angular rotation rate, Ω ≡ u φis constant there is no shear. The gradient inRthe R direction of the tangential velocity component must therefore be R dΩ , so wedRexpect(67) T visc,rφ = −νΣR dΩdRThe viscous stress tensor gives the momentum density flux. We multiply by R toestimate the angular momentum density flux. The divergence of that is what we seeon the right hand side of equation (64) which we can now write as(68)∂l∂t + 1 ∂R ∂R (Rlu R) = 1 ∂ ( )−R 2 T visc,rφR ∂RIf we multiply both sides of equation (64) by 2πRdR we can consider the angularmomentum in a ring of radius R with width dR. The right hand side then gives thenet torque on the annulus or the torque at R(69) 2πdR ∂∂R(νR 3 Σ dΩdR)= 2πνΣR 3 dΩdRIf there is an additional torque on the disk, for example from spiral density wavesdriven by a planet at a resonance, it would be inserted into equation (64) in the sameposition as the viscous torque term given above.We can use a Keplerian approximation u φ = √ GM/R for mass M. It is helpfulto compute(70)dΩdR = −3 Ω2 RSubstituting u φ and dΩ/dR into equation (64),∂ (R 1/2 Σ ) + 1 (∂R 3/2 Σu R + 3 )(71)∂tR ∂R2 νR1/2 Σ1/2 ∂ΣR∂t + 3 2 R−1/2 Σu R + R 1/2 (Σ ,R u R + Σu R,R ) + 1 (∂ 3Σ)R ∂R 2 νR1/23/2 ∂ΣR∂t + 3 2 R1/2 Σu R + R 3/2 (u R,R Σ + u R Σ ,R ) + ∂ ( 3(72)Σ)∂R 2 νR1/2= 0= 0= 0where for the second equation we have multiplied by R. Our continuity equationgives us(73)∂Σ∂t + Σu RR + Σ ,Ru R + Σu R,R = 0
14 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3Subbing in to equation 72 for Σu R+ Σ R ,Ru R we find a relation for the radial velocityfor a Keplerian disk(74) u R = −3Σ −1 R −1/2 ∂ (νR 1/2 Σ )∂REliminating u R from equation (71) we find∂Σ(75)∂t = 3 [∂R 1/2 ∂ ]R ∂R ∂R (νΣR1/2 )which can also be written∂Σ(76)∂t = − 3 ∂R ∂R (3RΣu R)The second derivative in equation (75) implies that there are diffusive terms in theevolution of the density as well as advective or accretion terms. We might call“accretion” a flow that takes place even if the density is very smooth and diffusiona flow that depends on the gradient of the density. Looking again at equation (76)that holds for a Keplerian system. The mass flux through the disk at radius R is(77) Ṁ = 2πRΣu RWe see from a comparison of the mass flux with equation (76) that a disk withconstant mass flux is also a steady state disk ( ˙Σ = 0).The more general expression for u R in a non-Keplerian setting (using the sameprocedure as followed above) is(78) u R = 1RΣ (2u φ + R 2 Ω ,R ) −1 ∂ (νR 3 Σ dΩ )∂R dRThe sign of the radial velocity, u R , is set by the sign of the derivative. The derivativeis the same one giving angular momentum flux on the right hand side of equation (64)and so determines the direction of angular momentum transport. If the derivative ispositive then one could have an excretion disk rather than an accretion disk.2.<strong>1.</strong> Accretion to order of magnitude. Going back to equation (64)∂(79)∂t (RΣu φ) + 1 (∂ ( )R 2 1 ∂Σu φ u R = νR 3 Σ dΩ )R ∂RR ∂R dRWe consider a steady solution (so drop the first term on left) and consider the typicalsize of each term. The second term ∼ Σu φ u R . The right hand side ∼ νΣu φ /R.Equating these two we find(80) u R ∼ ν/R
typical accretion timescale(81) t ν ∼ R/u R ∼ R 2 /νand accretion rate through the disk<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 15(82) Ṁ = 2πRΣu R ∼ 2πΣνFor Keplerian rotation with dΩ/dR = 3 2 u φ/R 2 and equation (74) gives(83) u R ∼ − 3 ν2 Rand so(84) Ṁ ∼ 3πΣν2.2. Hydrostatic equilibrium for an accretion disk. We recall that hydrostaticequilibrium gives us(85) ρ∇φ = −∇pConsider a cylindrical coordinate system with(86) s = √ R 2 + z 2and potential Φ(s). It is convenient to compute(87)We can expand the potential in z∂s∂z = z s(88) Φ(r, z) ≈ Φ(R) + ∂Φ∂zEvaluating derivatives(89)(90)∂ 2 Φ∂z 2= ∂Φ∂s∣ ∣ z + ∂2 Φ ∣∣∣z=0 z 2z=0∂z 2 2∂Φ∂z = ∂Φ ∂s∂s ∂z = ∂Φ z∂s s( 1s − z ) ( ) 2∂s+ ∂2 Φ ∂s= ∂Φs 2 ∂z ∂s 2 ∂z ∂sOnly the second order term will contribute when z = 0 so( 1s − z2s 3 )(91) Φ(R, z) ∼ Φ(R) + ∂Φ z 2∂s 2RWe recall that the circular velocity for a particle in a circular orbit is(92) v 2 c = R ∂Φ∂R+ ∂2 Φ z 2∂s 2 s 2
16 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3so that(93) Φ(R, z) ∼ Φ(R) + v2 c z 2anddΦ(94)dz ∼ v2 c zR 2Using the hydrostatic equilibrium equation we find2R 2(95) − dΦdz = 1 dpρ dz = 1 dp dρρ dρ dz = c2 s dρρ dzSo that(96) − dρρ = zdz v2 cR 2 c 2 sA solution is ρ ∝ exp(−z 2 /(2h 2 )) with scale height such that(97)hR ∼ c sv cThis useful equation relates the temperature of a disk to its aspect ratio or thickness.The ratio h/r is often called the aspect ratio. The above relation implies thata thick disk is a hot one and that a cold disk is a thin one. A velocity dispersion σof an ensemble can be used in place of the sound speed in this relation for examplein considering molecular clouds in a galaxy disk or planetesimals in a collisional ringsystem.This relation can also be written(98) c s ≈ hΩwhere Ω = v c /R is the angular rotation rate of a particle in a circular orbit.Figure 5. Hotter disks are thicker.
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 172.3. Shakura and Sunyaev’s α-disk. Accretion disks are suspected in young stellarsystems and surrounding black holes and other compact objects. Unfortunately itis often difficult to directly observe them and so characterize their physical properties.It is common to estimate the kinematic viscosity as(99) ν = αc s hHere c s is the sound speed and h the vertical scale height of the disk. The parameterα is dimensionless and we can see that we have the correct units for the kinematicviscosity. The above form for the viscosity was adopted by Shakura and Sunyaev.The parameter α is often unknown though it has been estimated to be small, of order0.01 in circumstellar disks and of order 1 in some active galactic nuclei.Let us estimate the accretion timescale for an α disk.(100) t ν ∼ R2ν ∼R2αc s hUsing our hydrostatic equilibrium equation for c s−1 R2(101) t ν ∼ αh 2 Ω−1The angular rotation rate Ω = √ GM/R 3 so we can write(102) Ω −1 = 1yr ( ) −1/2 ( M R2π M ⊙ 1AU) 3/2So our accretion timescale(103) t ν ∼ 1yr ( ) −2 ( ) −1/2 ( ) 3/2h M R2π α−1 R M ⊙ 1AUFor an aspect ratio of h/r ∼ 0.05 and α = 0.01 we get t ν ∼ 10 5 yr at 1 AU. Theseare “typical values” used for circumstellar disks.2.4. Reynolds Number. The Reynolds number is a dimensionless number thatgives the importance of viscosity in a flow. We consider a flow with v a typicalvelocity in the problem, L the length-scale and ν the kinematic viscosity. A ratio ofinertial to viscous forces can be estimate from a the sizes of the u · ∇u term and theν∇ 2 u term in the Navier-Stokes equation.(104)We define the Reynolds number asinertial forceviscous force ∼ v2 /Lνv/L ∼ vL 2 ν(105) R ≡ vL ν
18 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3High Reynold’s number <strong>flows</strong> tend to be turbulent (flow inside a firehose). Note thereis no consideration of the sound speed here. Low Reynolds number <strong>flows</strong> are <strong>flows</strong>where viscosity is important, like a bacteria swimming in water or a brick sinking intar.Usually the Reynolds number is estimated with L the size of an object, like thediameter of a rain drop. The velocity would be the rain drop’s velocity as it fallsthrough the air. The drag force is estimated as a function of Reynold’s number andshape. Equating the drag force against the force from gravity would allow one tosolve for the the terminal velocity as a function of drop diameter.What would a Reynolds number be for our accretion disk? Our typical velocity isthe circular velocity. Our length scale the radius, so(106) R = v crν∼ α−1 ( rhand is high for low viscosity thin disks.Watch movie on Drag III at NCFM on boundary layers, drag coefficients andReynold’s number.2.5. Circumstellar disk heated by stellar radiation. In circumstellar disks theheat flux due to absorption of radiation from the central star may set the effectivetemperature of the disk. If the temperature is set by the radiation from the centralstar then(107)L ∗4πR 2 ∼ σ SBT 4 effHere L ∗ is the luminosity of the star. The above equation should include an albedoand an emissivity and can more accurately be written(108)) 2L ∗4πR 2 (1 − β) ∼ ɛσ SBT 4 effwhere β is an albedo and ɛ is an emissivity. Here β and ɛ are both integrated overwavelength.Above we have not considered the possibility that the disk itself can block radiationfrom the star or self-shield. If the disk is optically thick then we need to take intoaccount the fraction of the disk per unit area that is illuminated. A correction factorto the above equation that depends on the flaring of the disk can be added. A diskwith constant axis ratio (h/R constant) will self-shield from the central star. So weexpect only a flaring disk will absorb starlight. The difference between the ray anglesfrom the star at a slope of h/r and the local disk slope, dh/dR, will determine theflux absorbed. Only when dh > h will the disk be illuminated. We estimate thedR R
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 19Figure 6. A flared disk. At each radius, R, the height of the diskgives an aspect ratio h/R. The amount of light absorbed per unit areadepends on the aspect ratio and its radial gradient.fraction of flux absorbed(109) f ∼ dhdR − h Rwhich is sometimes written as(110) f ∼ h ROur temperature balance equation becomes(111)[ d ln hd ln R − 1 ]L ∗4πR 2 (1 − β)f ∼ ɛσ SBT 4 effAdditional complications include considering that the skin of the disk could be hotterthan the interior because the spectrum of starlight peaks in the optical bands butthat from the thermal emission from the disk peaks in the infrared where the opacityis lower.2.5.<strong>1.</strong> Example of h(R) for an optically thin disk with flaring set by stellar radiation.Suppose the disk is optically thin. In this case we can ignore the disk flaring in determiningthe fraction of light absorbed by the disk and so setting the disk temperature.Our equation for radiation balance implies that T eff ∝ R −1/2 . The temperature andsound speed are related with c s ∝ T 1/2 so that c s ∝ R −1/4 . We can use our equationof hydrostatic equilibrium h ∼ c s Ω −1 with angular rotation rate Ω =that(112) h ∝ R 5/4We note that the disk does flare as h/R ∝ R 1/4 increases with radius.√GMR 3to find
20 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3Figure 7. If viscous energy dissipation dominates the energy inputinto the disk (left) then we expect the mid plane of the disk is hotterthan the surface. The effective temperature of the disk surface dependson the energy dissipated in the disk. The vertical temperaturegradient depends on disk opacity. If the energy absorbed from the stardominates that dissipated viscously then the disk temperature dependson the radiation absorbed per unit area (right). The disk temperaturegradient would not be large. The temperature may not be exactlyuniform (as a function of height) as emission depends on opacity as afunction of wavelength. For example, the center of the disk, shieldedfrom star light might be able to radiate at longer wavelengths as theopacity is often lower at longer wavelengths. In this case the surfaceof the disk would be somewhat hotter than the mid-plane.2.6. <strong>Viscous</strong> Energy Dissipation. We can estimate the energy dissipation ratefor the accretion disk. The important component of the viscous stress tensor isT visc,rφ ∼ νΣR dΩ . From our discussion on viscous heat generation the heat generateddRper unit volume is the viscous stress times the strain. The only non-zero componentof the viscous stress tensor is T visc,rφ . The strain to use is R dΩ because it gives thedRvelocity shear in the r, φ direction. The energy per unit area dissipated per unit timewould be(113) ˙q visc = νΣR 2 ( dΩdRWe can evaluate this for a steadily accreting Keplerian disk using dΩ = − 3 dR 2(114) ˙q visc = 9 4 Ω2 νΣWe now relate νΣ to Ṁ to find the dissipation rate as a function of radius. Todo this we need to consider a boundary condition (and if we don’t do this we willfalsely find the system does not conserve energy).) 2Ω, R
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 21Consider a disk with constant steady accretion flow(115) Ṁ = 2πΣRu R = constantGoing back to equation 64 for angular momentum conservation and assuming asteady state disk(116)R 3 ΣΩu R − νR 3 ΣΩ ,R = CR 2 ΩṀ2π− νR 3 ΣΩ ,R = Cwith C another constant. We can solve for νΣ(117) νΣ = Ω]Ṁ[1 − C′RΩ ,R 2π ΩR 2where C ′ is a constant. For a Keplerian system ΩR 2 ∝ R 1/2 and[(118) νΣ = Ṁ 1 −3π( ) ]C′′ 1/2RΩRΩ ,R= 2 3so thatwhere C ′′ is another constant — with units of radius.condition at R in (a truncation edge) where Σ → 0 then[(119) νΣ = Ṁ ( ) ] 1/2 Rin1 −3π RIf we assume a boundaryNote that at large radius we find Ṁ ∼ 3πνΣ as we previously estimated.We insert this expression in to equation (114) finding[ ( ) ] 1/2(120) ˙q visc = 3ṀΩ2 Rin1 −4π R2.7. Accretion Luminosity. Consider equation (120) for the energy dissipated perunit area for a nearly Keplerian system in steady state. This viscously dissipatedenergy escapes as radiation from the top and bottom of the disk. Let us integratebetween inner and outer disk radii (R in , R out ) to estimate the total luminosity of thedisk due to accretion(121) L disc =∫ RoutRin2πR dR ˙q visc
22 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3For a Keplerian system accreting in steady state with accretion rate Ṁ,∫ [Rout( ) ] 1/23RinL disc =Rin 2 Ω2 ṀR 1 −dRR∫ [ ]Rout3=2 GM 1∗ṀR − R1/2 in(122)dR2 R 5/2Rin= 3 2 GM ∗Ṁ∼ GM ∗Ṁ(123)2R inThe form and units of this are correct.( )∣2R 1/2in3R − 1 ∣∣∣∣Rout3/2 R2.7.<strong>1.</strong> Comparison to energy gained in potential energy well. Let’s consider the energygained due to inflow into the potential well. Consider the kinetic and potentialenergy per unit mass for the gas in a circular orbit(124) e =( u2φ2 − GM R)= − GM2Rwhere I have assumed a circular velocity u 2 φ = R2 Ω 2 ∼ GM/R. The total energy perunit radius isdE(125)dR = 2πRΣeFlux of energy through radius R would be(126) 2πRΣeu R = eṀ ≈ ṀΩ2 R2and that per unit area (dividing by 2πR) would be(127) ˙q ∼ ṀΩ24π∼ GMṀ4πR 3We compare this to the viscous energy dissipation. Note the units are the sameand make sense but the viscous energy dissipation is larger by a factor of 3 at largeradius but smaller at small radius. Probably overall it is possible to argue that energyconservation is not violated. If we integrate ˙q over the disk we find a total energy(128) Ė ∼ GMṀ2R inwhich seems to be consistent with our accretion luminosity.Rin
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 23This estimate is physically wrong and should be corrected. xxx2.7.2. The temperature profile of the disk. Assume now that the disk is primarilyheated by the viscous energy dissipation. Using equation (114)(129) ˙q visc = 9 4 ΣΩ2 ν ∼ 2ɛσ SB T 4 effwhere T eff is the effective temperature at the surface of the disk and ɛ is the emissivity.We use a factor of 2 on the right hand side to include both top and bottomsurfaces of the disk. By surface we mean the height at which radiation can escape(sometimes call the τ = 1 or where the optical depth is 1).If the midplane of the disk is viscous then the heating takes place in the midplaneand heat must diffuse vertically through the disk before it escapes. In this case thecenter of the disk could be hotter than the surface. The two temperatures would berelated by the disk opacity setting the diffusion coefficient of radiation through thedisk. We expect(130) T 4 midplane ∼ τT 4 effwhere τ is the optical depth. The above holds if τ 1, however if τ < 1 then themidplane temperature is similar to the surface temperature.(131) τ = κΣ/2where κ is a mean opacity of the gas in the disk and the factor of two in the abovecomes from considering escape of radiation from the midplane or only through halfof the disk. Note τ is unitless but κ has units of the inverse of Σ or g −1 cm 2 . We notethat the above equation relating temperatures picks up a factor of 3/8 in a planeparallel setting. A popular value for κ might be of order 1 g −1 cm 2 in a dusty diskor about half that for an ionized disk. In general the averaged opacity is a functionof density and temperature. Lower values for opacity are used for cold molecularclouds, κ ∼ 0.01g −1 cm 2 .The above equations are sufficient to roughly estimate the thermal structure ofa simple circumstellar accretion disk and are useful for exploring their physical parametersin a variety of settings. In some cases more than one heat source must beconsidered to compute the thermal structure of a disk. If you are lucky one heatsource will dominate and you can neglect the others simplifying the calculation. Thetemperature of low density circumstellar disks is set by the radiation of the centralstar and only for the inner regions of an actively accreting system is there more heatingdue to viscous dissipation in which case this process sets the disk temperature.Accretion disks in Seyfert galaxies and quasars the inner hot region of the accretiondisk may illuminate the outer regions. To fully compute the temperature and density
24 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3structure of a disk the opacity as a function of depth and wavelength must be takeninto account.3. Vorticity and RotationVorticity is important in planetary atmospheres, including our own. 2014’s coldwinter is being attributed to variations in the structure of the vortex and vorticesnear the north pole.Define the vorticity as(132) ω = ∇ × uTo get some intuition on what vorticity is consider a solid body rotation with u =Ω × r. Let’s compute the vorticity for this(133) ω = ∇ × (Ω × r)To compute this let’s consider the i-th component and use summation notationω i = ɛ ijk∂∂x jɛ klm Ω l x m∂x m(134)= ɛ kij ɛ klm Ω l∂x jBefore we evaluate this further it is useful to know the following identity(135) ɛ ijk ɛ imn = δ jm δ kn − δ jn δ knUsing the identity(136)(137)ω i = (δ il δ jm − δ im δ jl )Ω l∂x m∂x j= Ω i δ jm∂x m∂x j− Ω j δ im∂x m∂x j(138)= Ω i δ jm δ jm − Ω j∂x i∂x j= Ω i 3 − Ω j δ ij= 3Ω i − Ω i= 2Ω iFor solid body rotation we find that(139) ω = 2ΩVorticity is a property of rotating <strong>flows</strong>. The above equation specifies the units forvorticity. Vorticity is in units of s −1 as it is like an angular rotation rate.
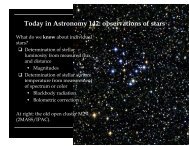
26 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3We did not include an additional force in Euler’s equation in our derivation abovebut as long as only conservative forces are considered, they do not change Helmholtz’sequation because curl of a grad is zero and so they drop out of the equation. Nonconservativeforces, such as the Coriolis force would change the equation. The Coriolisforce is rotational so that is not necessarily surprising.It may be interesting to read Kip’s notes at this point where he constructs aderivative corresponding to the rate of change of a vector with respect to a vectorthat is moving with the fluid. With this new derivative Dω/Dt = −ω(∇·u) and thevorticity evolution is parallel to itself. This may better explain the idea that vortexlines are frozen into the fluid. Shu’s book on the other hand considers the rate ofchange of an area vector for a surface.Instead we follow the illustration by Pringle and King which I found the clearest.We first consider the change in both length and direction of a small linear fluidelement that has both ends moving with the fluid.Figure 8. A vector element with each end that is moving with thefluid changes both in length and direction with the flow.3.2. Rate of Change of a vector element that is moving with the fluid.Consider a small linear element ds that has both ends moving with the fluid. Wecan call the left hand side of ds a position x 1 and the right and side x 2 . The originalvector at time t = 0 is(148) ds = x 2 − x 1 .After time dt the vector is at(149) ds + [u(x 2 ) − u(x 1 )]dtFor any function f(x) we can write(150) f(x 2 )−f(x 1 ) = ∂f ∂f ∂fdx+ dy+∂x ∂y ∂z dz = ∇f(x 2−x 1 ) = (∇f)·ds = (ds·∇)f
In the same way<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 27(151) u(x 2 ) − u(x 1 ) = ∇u · (x 2 − x 1 ) = (ds · ∇)uso(152) ds + [u(x 2 ) − u(x 1 )]dt = ds + (ds · ∇)udtwhere each component of u is expanded out in Taylor series to first order.change in the vector element moving with the fluid isDds(153)= (ds · ∇)u.DtThis implies that the length of our little linear element only changes if the gradientof the velocity in a direction parallel to ds is non-zero. The little linear element doesnot change length if the velocity has a gradient perpendicular to the line element.If there is no velocity gradient then the line element is swept along and stays thesame length and direction. Only if there is a velocity gradient does each end moveseparately and the element changes length and direction.Now let’s go back to our relation for vorticity or Helmholtz’s equation(154)We use the identity∂ω∂t= ∇ × (u × ω)(155) ∇ × (u × ω) = (ω · ∇)u + u(∇ · ω) − ω(∇ · u) − (u · ∇)ωAs ω is a curl ∇ · ω = 0. This gives us∂ω(156)= (ω · ∇)u − ω(∇ · u) − (u · ∇)ω∂torDω(157)Dt = ∂ω + (u · ∇)ω = (ω · ∇)u − ω(∇ · u)∂twhere we have used our advective derivative. The first term on the right hand side isin the same form as equation (153) for the rate of change of a linear element movingwith the fluid. The second term on the right hand side we manipulate using theequation of continuity,∂ρ(158)∂t + ∇ · (ρu) = 0 or DρDt = −ρ∇ · uInserting this into our relation for vorticity(159)DωDt = (ω · ∇)u + ω 1 Dρρ DtThe
28 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3or(160)or(161)DωDt+ ρωDρ−1Dt= (ω · ∇)u( ) ( )D ω ω=Dt ρ ρ · ∇ uCompare this to equation (153) which I repeat here(162)DdsDt= (ds · ∇)uIt is clear that they are in the same form. The interpretation is that ω/ρ moves asif it were frozen into the fluid.Figure 9. In an inviscid barotropic fluid, vorticity divided by densityis transported with the fluid.3.3. Kelvin Circulation Theorem. We will look at the evolution of vorticity inanother way, that involving circulation. Consider the circulation around a small loopC with a line integral∮(163) Γ = u · dsC
Apply Stokes theorem∮(164) Γ =C<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 29∫∫u · ds = (∇ × u) · dA =SSω · dAwhere S is a surface inside the loop C. The above implies that the circulation througha small loop C is the same thing as the integral of the vorticity passing through theloop.Now we let C move with the fluid and consider the rate of change of the circulation,Γ.(165)(166)DΓDt= D ∮u · dsDt C∮Du=C Dt∮C· ds + ∮=Cu · DdsDt( ∂u∂t + (u · ∇)u )ds +∮Cu · DdsDtThe term on the right hand side has the rate of change in length and directionfor a linear element of ds where the line element is moving with the fluid. We havelooked this carefully previously with equation (153). Using equation (153)(167)(168)∮Cu · DdsDt==∮∫CS∮u · (ds · ∇)u =∇ ×Last step again using Stokes theorem.Going back to our rate of change of circulation(169)DΓDt = ∮CC( 12 ∇u2 )dA = 0( ∂u∂t + (u · ∇)u )ds12 ∇u2 · dsUsing Euler’s equation, and assuming conservative forces and an barotropic fluid(170)DΓDt∮C= − ∇Pρ∫Sds = −(∇ × ∇h) dA = 0The circulation around a loop that is moving with the fluid does not change in time.A equivalent statement is that the vorticity passing through a surface moving withthe fluid remains constant.
30 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3If we take the above equation (169) and our vector identity (equation 144) on theright hand side we find( )DΓ ∂u(171)Dt∮C= ∂t + ∇u22 − (u × ω) · dsnow use Stokes equation(172)DΓDt=∫SdA ·( ∂ω∂t − ∇ × (u × ω) ).Thus the circulation theorem dΓ/dt = 0 implies that Helmholtz’s equation (equation147) is satisfied. The statement that vorticity is frozen into the fluid, or moveswith the fluid is equivalent to Helmholtz’s equation. While we considered the timederivative of the loop C as it moved with the fluid we could also have considered thetime derivative of the area dA as the surface S moves through the fluid to give thesame expression.Figure 10. In an inviscid barotropic fluid, the circulation around aloop that is moving with the fluid remains constant. Likewise thevorticity integrated through the surface bounded by the loop remainsconstant.3.4. Vortex lines and vortex tubes. A vortex line is a line connecting local vorticityvectors. At each point on a vortex line, the tangent to the line is equal to thevorticity. A vortex tube is a surface formed by vortex-lines passing through a loop.The strength of a vortex-tube, or the vortex flux, is the integral of the vorticity acrossa surface that slices a vortex tube. Using Gaus’s law on a vortex tube∫∫(173)∇ · ωdV = ω · dAVwhere A is a surface with top and bottom slicing a vortex tube and with sidesconsisting of vortex lines. The divergence of the vorticity is zero so the left hand sideA
32 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3Using the MHD approximation we will find an equation for the magnetic field thatlooks similar to equation (147) and we will then conclude that magnetic field linesare frozen into the fluid.In the above discussion we have neglected viscous forces. When viscous forcesare included Helmholtz’s equation equation (147) picks up an extra and nonzeroterm involving the viscosity. Where viscosity is not important the vorticity is frozeninto the fluid and moves with the fluid. However vorticity is generated in turbulentregions and boundary layers.To summarize: For a barotropic, inviscid fluid, the vorticity integrated througha surface moving with the fluid is constant. Equivalently the circulation around aloop moving with the fluid is constant. Equivalently the vector ω/ρ is frozen intothe fluid.3.5. Vortex stretching and angular momentum. Looking at our equation thatwe interpreted in terms of vorticity being frozen into the fluid.( ) ( )D ω ω(175)=Dt ρ ρ · ∇ uIn an incompressible setting we can remove the density(176)DωDt= (ω · ∇) uIf the gradient of u is positive in the direction of ω then the Lagrangian derivativeof the vorticity is positive and the vorticity increases. If we think of the vorticityas lying between two points frozen into the fluid and the motion moves those twopoints further apart then the length of the vorticity vector increases. This is knownas vortex stretching and it has to arise via conservation of momentum as we haveprimarily been manipulating variations of Euler’s equation and this is equivalent toconservation of momentum.But why is it that when we have a diverging flow that it spins up? If we havea diverging flow along the vorticity direction and the flow is incompressible thenwe must also have a converging flow in the other directions. This is like an iceskater reducing her momentum of inertia and so increasing her spin. Looking at theflux tube picture if the flux lines get close together then the vorticity inside a fluxtube must increase. Because the vorticity is frozen into the fluid, this only happenswhen there is converging flow making the the vortex lines approach each other andstretching along the vortex lines corresponding to a diverging flow along the fluxtube.
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 33Figure 13. When a vortex tube is pinched and stretched, the vorticityincreases in the waste of the tube.3.6. Bernoulli’s constant in a wake. In our derivation of Bernoulli’s equation,but starting with the Navier Stokes equation(177)∂u∂t + (u · ∇)u = −∇Φ − 1 ρ ∇p + ν∇2 uusing the vector identity( ) u2(178) u × (∇ × u) = ∇ − (u · ∇)u2and using enthalpy we can write( )∂u(179)∂t + u × ω = −∇ Φ + h + u22+ ν∇ 2 uWe dot this with u to consider what happens along streamlines. In a steady stateflow and along a streamline)(180) u · ∇(Φ + h + u2= νu · ∇ 2 u2The Bernoulli constant or function Φ + h + u2 is not constant in the flow if viscosity2is important. The Bernoulli function Φ + h + u2 would decrease along a streamline2that is affected by viscous forces. Primarily streamlines that pass close to the surfaceof a body or pass through turbulent eddies would be affected.
34 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 33.7. Diffusion of vorticity. Recall the Navier-Stokes equation but including thepossibility of compressible flowDu(181)Dt = 1 [−∇p + (ζ + η/3)∇(∇ · u) + η∇ 2 u ]ρTaking the curl of both sides and using a vector identity∂ω(182)∂t − ∇ × (u × ω) = η ρ ∇2 ω + ∇ρ [ρ × ∇p − η∇ 2 u − (ζ + η ]2 3 )∇(∇ · u)The first term on the right hand side gives the diffusion of vorticity due to kinematicviscosity. The second term on the right arises when the fluid is compressible. Whenthe fluid is incompressible, (∇ρ = 0), then the equation is, in fact, a diffusionequation. For incompressible flow∂ω(183)∂t − ∇ × (u × ω) = ν∇2 ωFigure 14. In the laminar part of the flow, Bernoulli’s constant andthe vorticity are conserved along stream lines. Turbulence and boundarylayers and viscous stresses in them can induce vorticity into anobject’s wake. Bernoulli’s constant is reduced in streamlines in theobject’s wake that pass through boundary layers.3.8. Potential Flow and d’Alembert’s paradox. Consider an object movingthrough a fluid that is at rest and extend to infinity in all directions. Where thefluid is at rest, the flow has no vorticity. As vorticity is frozen into the fluid, it shouldbe zero everywhere. We can consider a velocity field such that the vorticity is zeroeverywhere;(184) ω = ∇ × u = 0.There should be a potential function, φ(x, y, z), such that(185) ∇φ = u.
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 35Because u is a gradient of a potential function, its curl is automatically zero, andthe vorticity is zero everywhere. When the flow is laminar, it can be convenient tosolve for a potential function instead of the entire flow field.When the fluid is incompressible ∇ · u = and ∇ 2 φ = 0. In this case the potentialfunction satisfies Laplace’s equation and may be easier to work with.Boundary layers and rotational <strong>flows</strong> cannot be described as a potential flow. As aconsequence, though mathematically attractive, potential flow models have limiteduse. It is sometimes convenient to use them to describe part of a flow, and matchingthe boundaries of the potential flow to a flow description that is not described by apotential.Consider the object moving through a fluid that at rest and extend to infinityin all directions. As the vorticity is zero at infinity, the vorticity should be zeroeverywhere. After using a single vector identify Euler’s equation (equation 145) fora barotropic fluid can be written(186)(∂u u2∂t + ∇ 2)− u × ω = −∇hIf the vorticity is zero everywhere and the flow is steady state then)(187) ∇(h + u2+ ∂u2 ∂t = 0If the fluid is irrotational then we can use a potential function ∇φ = u and the aboveequation becomes(188) ∇(h + u22 + ∂φ )= 0∂tThis implies that(189) h + u22 + ∂φ∂t = F (t)only depends on time and cannot depend on position. We can define a new potential(190) φ ′ = φ −∫ tF (t)dtso that ∇φ ′ = ∇φ and∂φ ′(191)∂t = ∂φ∂t − F (t)Inserting this back into equation 189 we find(192) h + u22 + ∂φ′∂t = constant
36 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3and this implies that we can choose the potential function such that the entire functionis constant. If the fluid is steady state then(193) h + u22 = constantThis is Bernoulli’s function, but here the function is not only constant on streamlinesbut is constant everywhere. In short: if the flow is irrotational, barotropic and inviscidBernoulli’s function is constant everywhere.For an incompressible fluid, this implies that(194) p = p ∞ − ρ u22 .The drag on an object (or equivalently lift) is the pressure integrated over the surfaceof the object∫ ∫)(195) F = pdA =(p ∞ − ρ u2dA2SSwhere S is the surface of the object. Using Gaus’s law (and remembering that wehave assumed an incompressible fluid with ρ constant and ∇ · u = 0) we find that∫(196) F = ∇ · ( ρ 2 u2 )dV = 0.VAn irrotational flow about a body in a barotropic, inviscid, and incompressible fluidgives no drag or lift. This is d’Alembert’s paradox.The paradox is resolved by considering where our approximations fail. Flow isnot inviscid near the body and vortices can be generated from boundary layers. Theparadox implies that vorticity generation is necessary in order to account for (orestimate) lift and drag forces. As a consequence, the potential flow approximationcannot be used to describe the entire flow.Vortex shedding is a necessary component to generate lift. However, it takesenergy to generate vorticity, so if a plane generates excessive vorticity then it willburn more fuel. This is a particular issue for vortices generated at airplane wing tips.Fuel efficient planes can minimize what is known as “vortex drag” by having large,wide wings compared to the plane length, or with winglets – these are the little tagspointing upwards at the ends of some airplane wings.3.9. Burger’s vortex. Burger’s vortex is one of a few known simple steady stateanalytical solutions to the Navier-Stokes equation that exhibit vorticity. It can beused as an analogy for how water rotates as it goes down a drain, or perhaps for atornado.
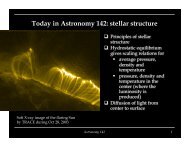
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 37Figure 15. Vorticity generated at a planet wing tip. This figure from Wikipedia.Figure 16. Streamlines for Burger’s vortex. If z is flipped then theflow is like water going down a drain.Consider a steady flow in cylindrical coordinates with velocity vector(197) v = v rˆr + v z ẑ + v φ ˆφ
38 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3with(198)v r = − 1 2 αrv z = αzv φ = v φ (r)and α > 0 a constant that describes the strain or rate of shear in the flow.The vorticity for this flow only contains a ẑ component.(199) ω z = 1 rddr (rv φ(r))The ẑ component of the Navier-Stokes equation then implies that(200)Dω zDt= ω z α + ν∇ 2 ω zThe term on the left, caused by the strain α, gives vortex line stretching and increasesthe vorticity. The term on the right, due to viscosity, reduces the vorticity. There isa particular radial distribution of vorticity where the two terms balance.A steady state solution to equation 200 is(201) ω z = ω 0 exp ( −cr 2)with constant c, that depends on a ratio of ν and strain α. If the strain is higherthen the vorticity is concentrated in a smaller region. If the viscosity is higher thenthe balance is achieved with a wider vorticity distribution.4. Rotating Flows4.<strong>1.</strong> Coriolis Force. In a rotating frame, a particle moving at a constant velocitycan actually be on a curved trajectory. The acceleration of a fluid element dependson the particle’s position, with respect to the center of rotation, and on the particle’svelocity. In a frame rotating with angular rotation rate or spin Ω the acceleration is(202)∂u∂t+ 2Ω × u + Ω × (Ω × r)gaining two terms, a Coriolis term (depending on u) and a centripetal term proportionalto Ω 2 .If Ω is in the ẑ direction we evaluate the centripetal acceleration term Ω×(Ω×r) =Ω 2 (x, y, 0). More generally(203) Ω × (Ω × r) = Ω 2 (r − (r · ˆn)ˆn)
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 39where ˆn = Ω/|Ω|. In cylindrical coordinates with R = √ x 2 + y 2 and with z alignedwith the spin the centripetal acceleration can be described as a gradient( ) Ω 2 R 2(204) Ω × (Ω × r) = ∇2Here R is the distance to the axis of rotation. We call the effective potential(205) Φ eff = Ω2 R 22This can be incorporated into either gravity or pressure term (in the barotropic case)within Euler’s equation.The Navier-Stokes equation becomes(206)where the gravitational potential∂u∂t + (u · ∇)u + 2Ω × u = −1 ρ ∇p − ∇Φ′ + ν∇ 2 u(207) Φ ′ = Φ + Φ eff4.2. Rossby and Ekman numbers. Previously we took a ratio of inertial to viscousforces to create a dimensionless number called the Reynolds number. We nowhave an additional free parameter Ω. We can use it to create two new dimensionlessnumbers. Our physical objects are a velocity scale, v, a size scale L, a viscosity ν anda rotation rate Ω. For the inertial force we estimate (u·∇)u ∼ v 2 /L. For the Corolisforce we estimate Ω × u ∼ Ωv. For the viscous force we estimate ν∇ 2 u ∼ νv 2 /L 2 .We call the Rossby number the ratio of the inertial to Coriolis forceInertial force(208) Ro ≡Coriolis force ≡ vΩLWe call Ekman number the ratio of viscous force to Coriolis force<strong>Viscous</strong> force(209) Ek ≡Coriolis force ≡ νΩL 2The Ekman number is low when viscosity is unimportant. The Rossby number is lowwhen the Coriolis force is important. Jupiter’s atmosphere is a low Rossby numbersetting.4.3. Geostrophic <strong>flows</strong> and the Taylor Proudman theorem. We consider asetting with small Rossby and Ekman numbers. We neglect the inertial force andwe neglect the viscous force. But we keep pressure force and Coriolis force and thesebalance (in the steady state)(210) 2Ω × u = − 1 ∇p − ∇Φ′ρ
40 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3If the flow is incompressible we can incorporate the effective potential term withinthe pressure gradient. If on the surface of a planet we can ignore vertical variationsin gravitational potential. Geostrophic balance is then written(211) 2Ω × u = − 1 ρ ∇p′where p ′ = p + ρΩ 2 R 2 /2.The left hand side is a vector that is perpendicular to u and so is perpendicularto stream lines. The right hand side is in the direction of pressure gradient and soperpendicular to constant pressure contours. So the above equation is interpreted toimply that pressure is constant along streamlines.Let us take the curl of the geostrophic flow equation (equation 211).(212) ∇ × (Ω × u) = 0We use a vector identity(213) (Ω · ∇)u − (u · ∇)Ω + u(∇ · Ω) − Ω(∇ · u) = 0Because Ω is a constant, the second and third terms are zero. If the fluid is incompressiblethen the last term is zero and we find(214) (Ω · ∇)u = 0If we align our coordinate system so that ẑ is along the spin axis(215) Ω ∂u∂z = 0 → ∂u∂z = 0There cannot be any vertical variations in the velocity. This is called the Taylor-Proudman theorem. If we describe u = (u, v, w), then(216)∂u∂z = ∂v∂z = ∂w∂z = 0The velocity components can only vary in the plane, motions can only take place inplanes perpendicular to the spin axis. Often a boundary sets w = 0 somewhere andwe find that w = 0 everywhere. A consequence of the Taylor-Proudman theorem isthe formation of features known as Taylor columns.A steady state, incompressible flow with low Rossby and Ekman numbers givesus geostrophic flow. In such a flow there can only be motions perpendicular to theaxis of rotation. A rapidly spinning planet is expected to be comprised of columns.Vertical motions are surpressed.
<strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3 41Figure 17. Taylor columns for low Rossby, Eckman number steadystate flow in a rotating body.4.4. Two dimensional <strong>flows</strong> on the surface of a planet. On the surface of aplanet we can look at the velocity components only on the surface. In this case uhas two directions (azimuthal and latitudinal). Let u = (u, v, w) with u for the eastwestdirection, v the north-south component and w the vertical component. Thisis equivalent to assuming that the vertical velocity component is small compared tovelocities of horizontal wind on the surface of the planet. Setting w = 0 we cancompute the vorticity finding only a vertical component(217) ω =( ∂v∂x − ∂u∂y)ẑLet us call ζ the vertical component of the vorticity(218) ζ = ∂v∂x − ∂u∂yThis is in a local coordinate system with x, y, z aligned with u, v, w. However wehave not taken into account the vorticity due to the rotation of the planet. Thevorticity of a rotating body is equivalent to 2Ω where Ω is the spin vector of thebody. The vertical component of Ω depends on the latitude. If the neighborhoodis on the equator then there is no component of the spin in the vertical direction.Altogether the vertical component of the vorticity is(219) f = 2Ω sin θ
42 <strong>AST242</strong> <strong>LECTURE</strong> <strong>NOTES</strong> <strong>PART</strong> 3where θ is the latitude. The total vorticity (taking into account both horizontalwinds and rotation of the planet) is(220) ω = (0, 2Ω cos θ, ζ + 2Ω sin θ)In this local coordinate system.Question: How come the vorticity evolution equation only seems to depend onζ + f? What happens with the other component? A north south motion shouldchange the y component of vorticity.4.5. Thermal winds? Within the context of a geostrophic flow, flow velocities candepend on height. Instead of using height, z, as a free variable, the pressure is used.Hydrostatic equilibrium gives us a relation between pressure and height; dp = −ρgdz.Vertical gradients can be written as a derivative with respect to pressure.(1 ∂z(221)ρ = −g ∂px,y,tBy combining the geostrophic equations with the vertical pressure variation we canderive a relation between vertical velocity gradient and horizontal temperature gradient(at constant pressure).(222) f ∂v∂p = − 1ρT ∇Twhere the temperature gradient is at constant pressure and v = (u, v). These areknown as the thermal wind equations. Vertical velocity gradients are related tohorizontal temperature or density gradients.)5. Acknowledgments<strong>Viscous</strong> <strong>flows</strong> roughly following Thorne & Blandford, and Clarke & Carswell withsome insight from Pringle and King.