

Chapter 1 Topics in Analytic Geometry
Chapter 1 Topics in Analytic Geometry
Chapter 1 Topics in Analytic Geometry

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
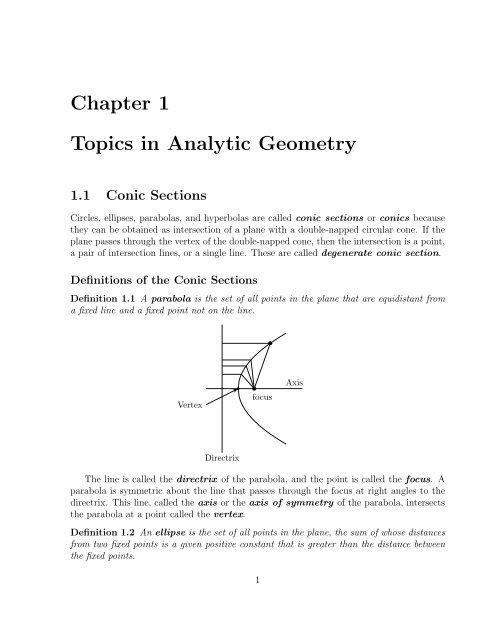
••<strong>Chapter</strong> 1<strong>Topics</strong> <strong>in</strong> <strong>Analytic</strong> <strong>Geometry</strong>1.1 Conic SectionsCircles, ellipses, parabolas, and hyperbolas are called conic sections or conics becausethey can be obta<strong>in</strong>ed as <strong>in</strong>tersection of a plane with a double-napped circular cone. If theplane passes through the vertex of the double-napped cone, then the <strong>in</strong>tersection is a po<strong>in</strong>t,a pair of <strong>in</strong>tersection l<strong>in</strong>es, or a s<strong>in</strong>gle l<strong>in</strong>e. These are called degenerate conic section.Def<strong>in</strong>itions of the Conic SectionsDef<strong>in</strong>ition 1.1 A parabola is the set of all po<strong>in</strong>ts <strong>in</strong> the plane that are equidistant froma fixed l<strong>in</strong>e and a fixed po<strong>in</strong>t not on the l<strong>in</strong>e.Vertex•focusAxisDirectrixThe l<strong>in</strong>e is called the directrix of the parabola, and the po<strong>in</strong>t is called the focus. Aparabola is symmetric about the l<strong>in</strong>e that passes through the focus at right angles to thedirectrix. This l<strong>in</strong>e, called the axis or the axis of symmetry of the parabola, <strong>in</strong>tersectsthe parabola at a po<strong>in</strong>t called the vertex.Def<strong>in</strong>ition 1.2 An ellipse is the set of all po<strong>in</strong>ts <strong>in</strong> the plane, the sum of whose distancesfrom two fixed po<strong>in</strong>ts is a given positive constant that is greater than the distance betweenthe fixed po<strong>in</strong>ts.1
•••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 2The two fixed po<strong>in</strong>ts are called the foci (plural of “focus”) of the ellipse, and themidpo<strong>in</strong>t of the l<strong>in</strong>e segment jo<strong>in</strong><strong>in</strong>g the foci is called the center.• • ••Focus•Center•FocusNote that if the foci co<strong>in</strong>cide, the ellipse reduces to a circle. For ellipse other than circle,the l<strong>in</strong>e segment through the foci and across the ellipse is called the major axis, and thel<strong>in</strong>e segment across the ellipse, through the center, and perpendicular to the major axis iscalled the m<strong>in</strong>or axis. The endpo<strong>in</strong>ts of the major axis are called vertices.M<strong>in</strong>or axisVextex•VextexMajor axisDef<strong>in</strong>ition 1.3 A hyperbola is the set of all po<strong>in</strong>ts <strong>in</strong> the plane, the difference of whosedistances from two fixed dist<strong>in</strong>ct po<strong>in</strong>ts is a given positive constant that is less than thedistance between the fixed po<strong>in</strong>ts.The two fixed po<strong>in</strong>ts are called the foci of the hyperbola. The midpo<strong>in</strong>t of the l<strong>in</strong>esegment jo<strong>in</strong><strong>in</strong>g the foci is called the center of the hyperbola. The l<strong>in</strong>e through the fociis called the focal axis, and the l<strong>in</strong>e through the center that is perpendicular to the focalaxis is called the conjugate axis. The hyperbola <strong>in</strong>tersects the focal axis at two po<strong>in</strong>tscalled the vertices. The two separate parts of a hyperbola are called the branches.ConjugateaxisCenterFocus FocusVertex VertexFocalaxis
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 3Associated with every hyperbola is a pair of l<strong>in</strong>es, called the asymptotes of the hyperbola.This l<strong>in</strong>e <strong>in</strong>tersect at the center of the hyperbola and have the property that as apo<strong>in</strong>t P moves along the hyperbola away from the center, the vertical distance between Pand one of the asymptotes approaches zero.yxEquations of Parabolas <strong>in</strong> Standard PositionLet p denote the distance between focus and the vertex. The vertex is equidistant fromthe focus and the directrix, so the distance between the vertex and the directrix is also p;consequently, the distance between the focus and the directrix is 2p.p p• •2p2pAxisDirectrixTheequationofaparabolaissimplest ifthevertex istheorig<strong>in</strong>andtheaxisofsymmetryis along the x-axis or y-axis. The four possible such orientations are shown <strong>in</strong> Figure below.These are called the standard positions of a parabola, and the result equations are calledthe standard equations of a parabola.OrientationyStandard Equationx = −p•(p,0)xy 2 = 4px
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 4OrientationyStandard Equation•(−p,0)xx = py 2 = −4pxy(0,p) •xy = −px 2 = 4pyyy = px•(0,−p)x 2 = −4pyTo illustrate how the equations <strong>in</strong> the above Figure are obta<strong>in</strong>ed, we will derive theequation for the parabola with focus (p,0) and directrix x = −p. Let P(x,y) be any po<strong>in</strong>ton the parabola.yD(−p,y)P(x,y)•F(p,0)xx = −pS<strong>in</strong>ce P is equidistant from the focus and directrix, the distances PF and PD <strong>in</strong> the aboveFigure are equal; that is,PF = PD (1.1)From the distance formula, the distance PF and PD arePF = √ (x−p) 2 +y 2 and PD = √ (x+p) 2 (1.2)
•••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 5Substitut<strong>in</strong>g <strong>in</strong> (3.22) and squar<strong>in</strong>g yieldsand after simplify<strong>in</strong>g(x−p) 2 +y 2 = (x+p) 2 (1.3)y 2 = 4px (1.4)The derivations of the other equations <strong>in</strong> the previous Figure are similar.Example 1.1 F<strong>in</strong>d the focus and directrix of the parabola x 2 = −6y and sketch its graph.Solution .........Example 1.2(a) F<strong>in</strong>d an equation of a parabola that has vertex at the orig<strong>in</strong>, opens right, and passesthrough the po<strong>in</strong>t P(7,−3).(b) F<strong>in</strong>d the focus.Solution .........Equations of Ellipses <strong>in</strong> Standard PositionIt is traditional <strong>in</strong> the study of ellipse to denote the length of the major axis by 2a, thelength of the m<strong>in</strong>or axis by 2b, and the distance between the foci by 2c.ccbbaaThe number a is called the semimajor axis and the number b the semim<strong>in</strong>or axis.There is a basic relationship between a, b, and c that can be obta<strong>in</strong>ed by exam<strong>in</strong><strong>in</strong>g thesum of the distances to the foci from a po<strong>in</strong>t P at the end of the major axis and from apo<strong>in</strong>t Q at the end of the m<strong>in</strong>or axis.√b2 +c 2Qbc c a−c√b2 +c 2•P
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 6Because P and Q both lie on the ellipse, the sum of the distances from each of them to thefoci must be equal. Thus, we obta<strong>in</strong>from which it follows thator equivalently2 √ b 2 +c 2 = (a−c)+(a+c)a = √ b 2 +c 2 (1.5)c = √ a 2 −b 2 (1.6)From (1.5), the distance from the focus to an end of the m<strong>in</strong>or axis is a, which implied thatall po<strong>in</strong>ts on the ellipse the sum of the distance to the foci is 2a.The equation of an ellipse is simplest if the center of the ellipse is at the orig<strong>in</strong> and thefoci are on the x-axis or y-axis. The two possible such orientations are shown <strong>in</strong> Figurebelow. These are called the standard positions of an ellipse, and the result equationsare called the standard equations of an ellipse.•−a(−c,0)Orientationyb•(c,0)axStandard Equationx 2a 2 + y2b 2 = 1−bya•(0,c)−bbxx 2b 2 + y2a 2 = 1•(0,−c)−aTo illustrate how the equations <strong>in</strong> the above Figure are obta<strong>in</strong>ed, we will derive theequation for the ellipse with the foci on the x-axis.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 7yP(x,y))••F ′ (−c,0)•F(c,0)xLet P(x,y) be any po<strong>in</strong>t on the ellipse. S<strong>in</strong>ce the sum of the distances from P to the fociis 2a, it follows thatPF ′ +PF = 2aso√(x+c)2 +y 2 + √ (x−c) 2 +y 2 = 2aTranspos<strong>in</strong>g the second radical to the right side of the equation and squar<strong>in</strong>g yields(x+c) 2 +y 2 = 4a 2 −4a √ (x−c) 2 +y 2 +(x−c) 2 +y 2and, on simplify<strong>in</strong>g,√(x−c)2 +y 2 = a− c a xSquar<strong>in</strong>g both sides aga<strong>in</strong> yieldswhich, by (1.5), can be written asx 2a 2 + y2a 2 −c 2 = 1x 2a + y22 b = 1 (1.7)2Conversely it can be shown that any po<strong>in</strong>t whose coord<strong>in</strong>ates satisfy<strong>in</strong>g (1.7) has 2a asthe sum of its distances from the foci, so that such a po<strong>in</strong>t is on the ellipse.Example 1.3 Sketch the graph of the ellipseSolution .........4x 2 +18y 2 = 36.Example 1.4 F<strong>in</strong>d an equation of the ellipse with foci (0,±2) and major axis with endpo<strong>in</strong>ts(0,±4).Solution .........
••••••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 8Equations of Hyperbolas <strong>in</strong> Standard PositionIt is traditional <strong>in</strong> the study of hyperbola to denote the distance between the vertices by2a, the distance between the foci by 2c, and to def<strong>in</strong>e the quantity b asThis relationship, which can be expressed asis pictured geometrically <strong>in</strong> Figure below.b = √ c 2 −a 2 (1.8)c = √ a 2 +b 2 (1.9)accb caaThe number a is called the semifocal axis of the hyperbola and the number b the semiconjugateaxis. Moreover, for all po<strong>in</strong>ts on a hyperbola, the distance to the farther focusm<strong>in</strong>us the distance to the closer focus is 2a.The equation of a hyperbola is simplest if the center of the hyperbola is at the orig<strong>in</strong>and the foci are on the x-axis or y-axis. The two possible such orientations are shown <strong>in</strong>Figure below. These are called the standard positions of a hyperbola, and the resultequations are called the standard equations of a hyperbola.OrientationyStandard Equation(−c,0)ba(c,0)xx 2a 2 − y2b 2 = 1y(0,c)ab(0,−c)xy 2a 2 − x2b 2 = 1
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 9The derivation of these equations are similar to those already given for parabolas andellipses, so we will leave them as exercises.A Quick Way to F<strong>in</strong>d AsymptotesThey are a trick that can be used f<strong>in</strong>d the equations of the asymptotes of a hyperbola.They can be obta<strong>in</strong>ed, when needed, by replac<strong>in</strong>g 1 by 0 on the right side of the hyperbolaequation, and then solv<strong>in</strong>g for y <strong>in</strong> terms of x. For example, for the hyperbolawe would writex 2x 2a 2 − y2b 2 = 1a − y22 b = 0 of 2 y2 = b2which are the equations for the asymptotes.a 2 x2or y = ± b a xExample 1.5 Sketch the graph of the hyperbola9x 2 −4y 2 = 36,and show<strong>in</strong>g its vertices, foci, and asymptotes.Solution .........Example 1.6 F<strong>in</strong>d the equation of the hyperbola with vertices (0,±8) and asymptotes y =± 4 3 x.Solution .........Translated ConicsEquations of conic that are translated from their standard positions can be obta<strong>in</strong>ed byreplac<strong>in</strong>g x by x − h and y by y − k <strong>in</strong> their standard equations. For a parabola, thistranslates the vertex from the orig<strong>in</strong> to the po<strong>in</strong>t (h,k); and for ellipses and hyperbolas,this translates the center from the orig<strong>in</strong> to the po<strong>in</strong>t (h,k).Parabolas with vertex (h,k) and axis parallel to x-axis(y −k) 2 = 4p(x−h) [Opens right](y −k) 2 = −4p(x−h) [Opens left]Parabolas with vertex (h,k) and axis parallel to y-axis(x−h) 2 = 4p(y −k)(x−h) 2 = −4p(y −k)[Opens up][Opens down]
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 10Ellipse with center (h,k) and major axis parallel to x-axis(x−h) 2a 2+(y −k)2b 2 = 1 (a > b)Ellipse with center (h,k) and major axis parallel to y-axis(x−h) 2b 2+(y −k)2a 2 = 1 (a > b)Hyperbola with center (h,k) and focal axis parallel to x-axis(x−h) 2a 2−(y −k)2b 2 = 1Hyperbola with center (h,k) and focal axis parallel to y-axis(y −k) 2a 2− (x−h)2b 2 = 1Example 1.7 F<strong>in</strong>d an equation of the parabola with vertex V(−4,2) and directrix y = 5.Solution .........Sometimes the equations of translated conics occur <strong>in</strong> expanded form, <strong>in</strong> which case weare faced with the problem of identify<strong>in</strong>g the graph of a quadratic equation <strong>in</strong> x and y:Ax 2 +Cy 2 +Dx+Ey +F = 0The basic procedure for determ<strong>in</strong><strong>in</strong>g the nature of such a graph is to complete the squaresof the quadratic terms and then try to match up the result<strong>in</strong>g equation with one of theforms of a translated conic.Example 1.8 Show that the curveis a parabola.Solution .........y = 6x 2 −12x+8Example 1.9 Discuss and sketch the graph of the equationSolution .........16x 2 +9y 2 +64x−18y−71 = 0.
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 11Example 1.10 Show that the curve9x 2 −4y 2 −54x−16y +29 = 0is a hyperbola. Sketch the hyperbola and show the foci, vertices, and asymptotes <strong>in</strong> thefigure.Solution .........1.2 Rotation of Axes; Second-Degree EquationsQuadratic Equations <strong>in</strong> x and yWe saw <strong>in</strong> Examples 1.8 to 1.10 that equations of the formAx 2 +Cy 2 +Dx+Ey +F = 0 (1.10)can represent conic sections. Equation (1.10) is a special case of the more general equationAx 2 +Bxy +Cy 2 +Dx+Ey +F = 0 (1.11)which, if A, B, and C are not all zero, is called a quadratic equation <strong>in</strong> x and y. IfB = 0, then (1.11) reduces to (1.10) and the conic section has its axis or axes parallel tothe coord<strong>in</strong>ate axes. However, if B ≠ 0, then (1.11) conta<strong>in</strong>s a cross-product term Bxy,and the graph of the conic section represented by the equation has its axis or axes “tilted”relative to the coord<strong>in</strong>ate axes.Rotation of AxesConsider the rotation of axes <strong>in</strong> Figure below.yy ′•(0 ′ ,y ′ )rαθP(x,y)P(x ′ ,y ′ )x ′•(x ′ ,0 ′ )xThe axes of an xy-coord<strong>in</strong>ate system have been rotated about the orig<strong>in</strong> through an angle θto produce a new x ′ y ′ -coord<strong>in</strong>ate system. Each po<strong>in</strong>t P <strong>in</strong> the plane has coord<strong>in</strong>ates (x ′ ,y ′ )as well as coord<strong>in</strong>ates (x,y). To see how the two are related, let r be the distance from thecommon orig<strong>in</strong> to the P, and let α be the angle shown <strong>in</strong> Figure. It follows thatx = rcos(θ+α), y = rs<strong>in</strong>(θ +α) (1.12)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 12andx ′ = rcos(α), y ′ = rs<strong>in</strong>(α) (1.13)Apply<strong>in</strong>g the addition formulas for the s<strong>in</strong>e and cos<strong>in</strong>e, the relationships <strong>in</strong> (1.12) can bewritten asx = rcosθcosα−rs<strong>in</strong>θs<strong>in</strong>αy = rs<strong>in</strong>θcosα+rcosθs<strong>in</strong>αand on substitut<strong>in</strong>g (1.13) <strong>in</strong> these equations we obta<strong>in</strong> the follow<strong>in</strong>g relationships calledthe rotation equations:x = x ′ cosθ−y ′ s<strong>in</strong>θ(1.14)y = x ′ s<strong>in</strong>θ +y ′ cosθExample 1.11 Suppose that the axes of an xy-coord<strong>in</strong>ate system are rotated through anangle of θ = 45 ◦ to obta<strong>in</strong> an x ′ y ′ -coord<strong>in</strong>ate system. F<strong>in</strong>d the equation of the curve<strong>in</strong> x ′ y ′ -coord<strong>in</strong>ates.Solution .........x 2 −xy +y 2 −6 = 0If the rotation (1.14) are solved for x ′ and y ′ <strong>in</strong> terms of x and y, we obta<strong>in</strong>:x ′ = xcosθ +ys<strong>in</strong>θy ′ = −xs<strong>in</strong>θ+ycosθ(1.15)Example 1.12 F<strong>in</strong>d the new coord<strong>in</strong>ates of the po<strong>in</strong>t (2,4) if the coord<strong>in</strong>ate axes are rotatedthrough an angle of θ = 30 ◦ .Solution .........Elim<strong>in</strong>at<strong>in</strong>g the Cross-Product TermIn Example 1.11, we were able to identify the curve x 2 −xy+y 2 −6 = 0 as an ellipse becausetherotationof axes elim<strong>in</strong>ate the xy-term, thereby reduc<strong>in</strong>g the equation to a familiar form.This occurred because the new x ′ y ′ -axes were aligned with the axes of the ellipses. Thefollows theorem tells how to determ<strong>in</strong>e an appropriate rotation of axes to elim<strong>in</strong>ate thecross-product term of a second-degree equation <strong>in</strong> x and y.Theorem 1.1 If the equationAx 2 +Bxy +Cy 2 +Dx+Ey +F = 0 (1.16)is such that B ≠ 0, and if an x ′ y ′ -coord<strong>in</strong>ate system is obta<strong>in</strong>ed by rotat<strong>in</strong>g the xy-axesthrough an angle θ satisfy<strong>in</strong>gcot2θ = A−C(1.17)Bthen, <strong>in</strong> x ′ y ′ -coord<strong>in</strong>ates, Equation (1.16) will have the formA ′ x ′2 +C ′ y ′2 +D ′ x ′ +E ′ y ′ +F ′ = 0
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 13Remark• It is always possible to satisfy (1.17) with an angle θ <strong>in</strong> the range 0 < θ < π/2. Weshall always use such a value of θ.• The values of s<strong>in</strong>θ and cosθ needed for the rotation equations may be obta<strong>in</strong>ed byfirst calculat<strong>in</strong>g cos2θ and then comput<strong>in</strong>g s<strong>in</strong>θ and cosθ from the identitiess<strong>in</strong>θ =√1−cos2θ2and cosθ =√1+cos2θ2Example 1.13 Discuss and sketch the graph of the equation xy = 1.Solution .........Example 1.14 Identify and sketch the curve41x 2 −24xy +34y 2 −25 = 0Solution .........
<strong>Chapter</strong> 2Parametric and Polar Curves2.1 Parametric Equation; TangentL<strong>in</strong>esandArc Lengthfor Parametric CurvesParametric EquationSuppose that a particle moves along a curve C <strong>in</strong> the xy-plane <strong>in</strong> such a way that x- andy-coord<strong>in</strong>ates, as a functions of time, arex = f(t), y = g(t)We call these the parametric equations of motion for the particle and refer C as thetrajectory of the particle or the graph of the equations. The variable t is called theparameter for the equations.yC• (x,y)xExample 2.1 Sketch the trajectory over the time <strong>in</strong>terval 0 ≤ t ≤ 10 of the particle whoseparametric equations of motion arex = t−3s<strong>in</strong>t, y = 4−3cost14
•••••••••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 15Solution One way to sketch the trajectory is to plot the (x,y) coord<strong>in</strong>ate of po<strong>in</strong>ts on thetrajectory at those times, and connect the po<strong>in</strong>ts with a smooth curve.t x y0 0.0 1.01 -1.5 2.42 -0.7 5.23 2.6 7.04 6.3 6.05 7.9 3.16 6.8 1.17 5.0 1.78 5.0 4.49 7.8 6.710 11.6 6.5yx✠Example 2.2 F<strong>in</strong>d the graph of the parametric equationsx = cost, y = s<strong>in</strong>t (0 ≤ t ≤ 2π) (2.1)Solution One way to f<strong>in</strong>d the graph is to elim<strong>in</strong>ate the parameter t by not<strong>in</strong>g thatx 2 +y 2 = s<strong>in</strong> 2 t+cos 2 t = 1Thus, the graph is conta<strong>in</strong>ed <strong>in</strong> the unit circle x 2 +y 2 = 1. Geometrically, the parametert can be <strong>in</strong>terpreted as the angle swept out by the radial l<strong>in</strong>e from the orig<strong>in</strong> to the po<strong>in</strong>t(x,y) = (cost,s<strong>in</strong>t) on the unit circle. As t <strong>in</strong>creases from 0 to 2π, the po<strong>in</strong>t traces thecircle counterclockwise, start<strong>in</strong>g at (1,0) when t = 0 and complet<strong>in</strong>g one full revolutionwhen t = 2π.y1tx•(x,y)y(0,1)x✠
•••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 16OrientationThe direction <strong>in</strong>which thegraphof apair of parametric equations is traces asthe parameter<strong>in</strong>creasesiscalledthedirection of <strong>in</strong>creas<strong>in</strong>g parameter orsometimestheorientationimposed on the curve by the equation. Thus, we make a dist<strong>in</strong>ction between a curve, whichis the set of po<strong>in</strong>ts, and a parametric curve, which is a curve with an orientation. Forexample, we saw <strong>in</strong> Example 3.28 that the circle represented parametrically by (2.1) istraced counterclockwise as t <strong>in</strong>creases and hence has counterclockwise orientation.To obta<strong>in</strong> parametric equation for the unit circle with clockwise orientation, we canreplace t by −t <strong>in</strong> (2.1). This yieldsx = cos(−t) = cost, y = s<strong>in</strong>(−t) = −s<strong>in</strong>t (0 ≤ t ≤ 2π)Here, the circle is traced clockwise by a po<strong>in</strong>t that starts at (1,0) when t = 0 and completesone full revolution when t = 2π.y1xty(x,y)(0,1)xExample 2.3 Graph the parametric curvex = 2t−3, y = 6t−7by elim<strong>in</strong>at<strong>in</strong>g the parameter, and <strong>in</strong>dicate the orientation on the graph.Solution .........Express<strong>in</strong>g Ord<strong>in</strong>ary Functions ParametricallyAn equation y = f(x) can be expressed <strong>in</strong> parametric form by <strong>in</strong>troduc<strong>in</strong>g the parametert = x; this yields the parametric equationsx = t, y = f(t)For example, the portion of the curve y = cosx over the <strong>in</strong>terval [−2π,2π] can be expressedparametrically asx = t, y = cost (−2π ≤ t ≤ 2π)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 17Ifafunctionf isone-to-one,thenithasan<strong>in</strong>verse functionf −1 . Inthiscasetheequationy = f −1 (x) is equivalent to x = f(y). We can express the graph of f −1 <strong>in</strong> parametric formby <strong>in</strong>troduc<strong>in</strong>g the parameter t = y; this yields the parametric equationsx = f(t), y = tFor example, the graph of f(x) = x 5 +x+1 can be represented parametrically asx = t, y = t 5 +t+1and the graph of f −1 can be represented parametrically asx = t 5 +t+1, y = tTangent L<strong>in</strong>e to Parametric CurvesWe will be concerned with curves that are given by parametric equationsx = f(t), y = g(t)<strong>in</strong> which f(t) and g(t) have cont<strong>in</strong>uous first derivatives with respect to t. It can be provedthat if dx/dt ≠ 0, then y is a differentiable function of x, <strong>in</strong> which case the cha<strong>in</strong> rule impliesthatdydx = dy/dt(2.2)dx/dtThis formula makes it possible to f<strong>in</strong>d dy/dxdirectly fromthe parametric equations withoutelim<strong>in</strong>at<strong>in</strong>g the parameter.Example 2.4 F<strong>in</strong>d the slope of the tangent l<strong>in</strong>e to the curveat the po<strong>in</strong>t where t = π/3.Solution .........x = t−3s<strong>in</strong>t, y = 4−3cost (t ≥ 0)It follows from Formula (2.2) that the tangent l<strong>in</strong>e to a parametric curve will be horizontalat those po<strong>in</strong>ts where dy/dt = 0 and dx/dt ≠ 0, s<strong>in</strong>ce dy/dx = 0 at such po<strong>in</strong>ts.Atpo<strong>in</strong>tswheredx/dt = 0anddy/dt ≠ 0, therightsideof (2.2)hasanonzeronumeratorand a zero denom<strong>in</strong>ator; we will agree that the curve has <strong>in</strong>f<strong>in</strong>ite slope and a verticaltangent l<strong>in</strong>e at such po<strong>in</strong>t.At po<strong>in</strong>ts where dx/dt and dy/dt are both zero, the right side of (2.2) becomes an<strong>in</strong>determ<strong>in</strong>ate form; we call such po<strong>in</strong>ts s<strong>in</strong>gular po<strong>in</strong>ts.Example 2.5 A curve C is def<strong>in</strong>ed by the parametric equationsx = t 2and y = t 3 −3t.F<strong>in</strong>d the po<strong>in</strong>ts on C where the tangent is horizontal or vertical.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 18Solution .........Example 2.6 The curve represented by the parametric equationsx = t 2 y = t 3 (−∞ < t < +∞)is called a semicubical parabola. The parameter t can be elim<strong>in</strong>ated by cub<strong>in</strong>g x andsquar<strong>in</strong>g y, from which it follows that y 2 = x 3 .yxx = t 2 , y = t 3 (−∞ < t < +∞)The graph of this equation consists of two branches: an upper branch obta<strong>in</strong>ed by graph<strong>in</strong>gy = x 3/2 and a lower branch obta<strong>in</strong>ed by graph<strong>in</strong>g y = −x 3/2 . The two branches meet atthe orig<strong>in</strong>, which corresponds to t = 0 <strong>in</strong> the parametric equations. This is a s<strong>in</strong>gular po<strong>in</strong>tbecause the derivatives dx/dt = 2t and dy/dt = 3t 2 are both zero there. ✠Example 2.7 Without elim<strong>in</strong>at<strong>in</strong>g the parameter, f<strong>in</strong>d dy/dx and d 2 y/dx 2 at (1,1) and(1,−1) on the semicubical parabola given by the parametric equations <strong>in</strong> Example2.6Solution .........Arc Length of Parametric CurveThe follow<strong>in</strong>g result provides a formula for f<strong>in</strong>d<strong>in</strong>g the arc length of a curve from parametricequations for the curve.Arc Length Formula for Parametric CurveIf no segment of the curve represented by the parametric equationsx = x(t), y = y(t) (a ≤ t ≤ b)is traced more than once as t <strong>in</strong>crease from a to b, and if dx/dt and dy/dt are cont<strong>in</strong>uousfunctions for a ≤ t ≤ b, then the arclength L of the curve is given by√∫ b (dx ) 2 ( ) 2 dyL = + dt (2.3)dt dtaExample 2.8 F<strong>in</strong>d the circumference of a circle of radius a form the parametric equationsSolution .........x = acost, y = as<strong>in</strong>t (0 ≤ t ≤ 2π)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 192.2 Polar Coord<strong>in</strong>atesPolar Coord<strong>in</strong>ate SystemsA polar coord<strong>in</strong>ate system <strong>in</strong> a plane consists of a fixed po<strong>in</strong>t O, called the pole (ororig<strong>in</strong>), and a ray emanat<strong>in</strong>g from a pole, called the polar axis. In such a coord<strong>in</strong>atesystem we can associate with each po<strong>in</strong>t P <strong>in</strong> the plane a pair of polar coord<strong>in</strong>ates (r,θ),where r is the distance from P to the pole and θ is an angle from the polar axis to the rayOP.P(r,θ)rθO Orig<strong>in</strong>Polar axisThe number r is called the radial distance of P and the number θ the angular coord<strong>in</strong>ate(or polar angle) of P.Example 2.9 Plot the po<strong>in</strong>ts whose polar coord<strong>in</strong>ates are given.(a) (3,π/4) (b) (4,2π/3) (c) (2,5π/4) (d) (4,11π/6)Solution .........The polar coord<strong>in</strong>ates of a po<strong>in</strong>t are not unique. For example, the polar coord<strong>in</strong>atesall represent the same po<strong>in</strong>t.5π/3(1, 5π 3 ) −π/3(1,5π/3), (1,−π/3), (1,11π/3)(1,− π 3 ) 11π/3In general, if a po<strong>in</strong>t P has polar coord<strong>in</strong>ates (r,θ), then(r,θ +2nπ) and(r,θ −2nπ),(1, 11π3 )are also polar coord<strong>in</strong>ates of P for any nonnegative <strong>in</strong>teger n.As def<strong>in</strong>e above, the radial coord<strong>in</strong>ate r of a po<strong>in</strong>t P is nonnegative, s<strong>in</strong>ce it representsthe distance from P to the pole. However, it will be convenient to allow for negativevalues of r as well. To motivate an appropriate def<strong>in</strong>ition, consider the po<strong>in</strong>t P with polarcoord<strong>in</strong>ates (3,5π/4). We can reach this po<strong>in</strong>t by
••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 20• rotat<strong>in</strong>g the polar axis 5π/4 and then mov<strong>in</strong>g forward from the pole 3 units along theterm<strong>in</strong>al side of the angle, or• rotat<strong>in</strong>g the polar axis π/4 and then mov<strong>in</strong>g backward from the pole 3 units along theextension of the term<strong>in</strong>al side.Term<strong>in</strong>al sideP(3,5π/4)5π/4Polar axisP(3,π/4)π/4Term<strong>in</strong>al sidePolar axisThis suggest that the po<strong>in</strong>t (3,5π/4) might also be denoted by (−3,π/4), with m<strong>in</strong>ussign serv<strong>in</strong>g to <strong>in</strong>dicate that the po<strong>in</strong>t is on the extension of the angle’s term<strong>in</strong>al side ratherthan on the term<strong>in</strong>al side itself.In general, the term<strong>in</strong>al side of the angle θ +π is the extension of the term<strong>in</strong>al side ofθ, we def<strong>in</strong>e negative radial coord<strong>in</strong>ates by agree<strong>in</strong>g thatto be polar coord<strong>in</strong>ates for the same po<strong>in</strong>t.(−r,θ) and (r,θ+π)Relationship Between Polar and Rectangular Coord<strong>in</strong>atesFrequently, it will be useful to superimpose a rectangular xy-coord<strong>in</strong>ate system on top ofa polar coord<strong>in</strong>ate system, mak<strong>in</strong>g the positive x-axis co<strong>in</strong>cide with the polar axis. Thenevery po<strong>in</strong>t P will have both rectangular coord<strong>in</strong>ates (x,y) and polar coord<strong>in</strong>ates (r,θ).yP(r,θ) = P(x,y)ryθxxFrom the above Figure, these coord<strong>in</strong>ates are related by the equationsx = rcosθ, y = rs<strong>in</strong>θ (2.4)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 21These equation are well suited for f<strong>in</strong>d<strong>in</strong>g x and y when r and θ are known. However, tof<strong>in</strong>d r and θ when x and y are known, we use equationsr 2 = x 2 +y 2 , tanθ = y x(2.5)Example 2.10 F<strong>in</strong>d the rectangular coord<strong>in</strong>ates of the po<strong>in</strong>t P whose polar coord<strong>in</strong>ates are(4,2π/3).Solution .........Example 2.11 F<strong>in</strong>d polar coord<strong>in</strong>ates of the po<strong>in</strong>t P whose rectangular coord<strong>in</strong>ates are(1,−1).Solution .........Graphs <strong>in</strong> Polar Coord<strong>in</strong>atesWe will now consider the problem of graph<strong>in</strong>g equations <strong>in</strong> r and θ, where θ is assumed tobe measured <strong>in</strong> radians. Some examples of such equations areExample 2.12 Sketch the graph ofr = 1, θ = π/4, r = θ, r = s<strong>in</strong>θ, r = cos2θ(a) r = 1 (b) θ = π/4Solution .........Example 2.13 Sketch the graph of r = 2cosθ <strong>in</strong> polar coord<strong>in</strong>ates by plott<strong>in</strong>g po<strong>in</strong>ts.Solution .........Example 2.14 Sketch the graph of r = cos2θ <strong>in</strong> polar coord<strong>in</strong>ates.Solution Instead of plott<strong>in</strong>g po<strong>in</strong>ts, we will use the graph of r = cos2θ <strong>in</strong> rectangularcoord<strong>in</strong>ates to visualize how the polar graph of this equation is generated. This curve iscalled a four-petal rose.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 221r−1π2π3π2 2πy = cos2θθr varies from1 to 0 as θvaries from0 to π/4.r varies from0 to −1 as θvaries fromπ/4 to π/2.r varies from−1 to 0 as θvaries fromπ/2 to 3π/4.r varies from0 to 1 as θvaries from3π/4 to π.r varies from1 to 0 as θvaries fromπ to 5π/4.r varies from0 to −1 as θvaries from5π/4 to 3π/2.r varies from−1 to 0 as θvaries from3π/2 to 7π/4.r varies from−1 to 0 as θvaries from7π/4 to 2π.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 23Symmetry TestsObserve that the polar graph r = cos2θ <strong>in</strong> above Figure is symmetric about the x-axis andthe y-axis. This symmetry could have been predicted from the follow<strong>in</strong>g theorem.Theorem 2.1 (Symmetry Tests).(a) A curve <strong>in</strong> polar coord<strong>in</strong>ates is symmetric about the x-axis if replac<strong>in</strong>g θ by −θ <strong>in</strong> itsequation produces an equivalent equation.(b) A curve <strong>in</strong> polar coord<strong>in</strong>ates is symmetric about the y-axis if replac<strong>in</strong>g θ by π −θ <strong>in</strong>its equation produces an equivalent equation.(c) A curve <strong>in</strong> polar coord<strong>in</strong>ates is symmetric about the orig<strong>in</strong> if replac<strong>in</strong>g θ by θ+π, orreplac<strong>in</strong>g r by −r <strong>in</strong> its equation produces an equivalent equation.π/2(r,θ)(r,π −θ)π/2(r,θ)π/2(r,θ)000(r,−θ)(r,θ+π)or(−r,θ)(a)(b)(c)Example 2.15 Show that the graph of r = cos2θ is symmetric about the x-axis and y-axis.Solution .........Families of L<strong>in</strong>es and Rays Through the PoleFor any constant θ 0 , the equationθ = θ 0 (2.6)is satisfied by the coord<strong>in</strong>ates of the form P(r,θ 0 ), regardless of the value of r. Thus, theequation represents the l<strong>in</strong>e that passes through the pole and makes an angle of θ 0 with thepolar axis.π/2θ0θ = θ 0
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 24Families of CirclesWe will consider three families of circles <strong>in</strong> which a is assumed to be a positive constant:r = a r = 2acosθ r = 2as<strong>in</strong>2θ• The equation r = a represents a circle of radius a, centered at the pole• The equation r = 2acosθ represents a circle of radius a, centered on the x-axis andtangent to the y-axis at the orig<strong>in</strong>.• The equation r = a represents a circle of radius a, centered on the y-axis and tangentto the x-axis at the orig<strong>in</strong>.π/2π/2π/2r = 2as<strong>in</strong>θar = a0r = −2acosθ r = 2acosθ•(a,π)•(a,0)0•(a, π 2 )0•(a,− π 2 )r = −2as<strong>in</strong>θExample 2.16 Sketch the graphs of the follow<strong>in</strong>g equations <strong>in</strong> polar coord<strong>in</strong>ates.(a) r = 4cosθ (b) r = −5s<strong>in</strong>θ (c) r = 3Solution .........Families of Rose CurvesIn polar coord<strong>in</strong>ates, equations of the formr = as<strong>in</strong>nθ or r = acosnθ<strong>in</strong> which a > 0 and n is a positive <strong>in</strong>teger represent families of flower-shaped curves calledroses. The rose consists of n equally spaced petals of radius a if n is odd and 2n equallyspaced petals of radius a if n is even.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 25r = as<strong>in</strong>2θ r = as<strong>in</strong>3θ r = as<strong>in</strong>4θr = as<strong>in</strong>5θr = as<strong>in</strong>6θr = acos2θ r = acos3θ r = acos4θr = acos5θr = acos6θFamilies of Cardioids and LimaconsEquations with any of the four formsr = a±bs<strong>in</strong>θr = a±bcosθ<strong>in</strong> which a > 0 and b > 0 represent polar curves called limacons. There are four possibleshapes for a limacon that can be determ<strong>in</strong>ed from the ratio a/b. If a = b (the case a/b = 1),then the limacons is called a cardioids because of its heart-shaped appearance.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 26a/b < 1a/b = 11 < a/b < 2a/b ≥ 2Limacon with<strong>in</strong>ner loopCardioidDimpled limaconConvex limaconExample 2.17 Sketch the graph of the equation<strong>in</strong> polar coord<strong>in</strong>ates.Solution .........Families of Spiralsr = 2(1−cosθ)A spiral is a curve that coils around a central po<strong>in</strong>ts. The most common example is thespiral of Archimedes, which has an equation of the formr = aθ (θ ≥ 0) or r = aθ (θ ≤ 0)In these equations, θ is <strong>in</strong> radians and a is positive.Example 2.18 Sketch the graph of r = θ (θ ≥ 0) <strong>in</strong> polar coord<strong>in</strong>ates by plott<strong>in</strong>g po<strong>in</strong>ts.Solution .........2.3 Tangent L<strong>in</strong>es, Arc Length, and Area for PolarCurvesTangent L<strong>in</strong>es to Polar CurvesOur first objective <strong>in</strong> this section is to f<strong>in</strong>d a method for obta<strong>in</strong><strong>in</strong>g slopes of tangent l<strong>in</strong>esto polar curves of the form r = f(θ) <strong>in</strong> which r is a differentiable function of θ. A curve ofthis form can be expressed parametrically <strong>in</strong> terms of parameter θ by substitut<strong>in</strong>g f(θ) forr <strong>in</strong> the equations x = rcosθ and y = rs<strong>in</strong>θ. This yieldsx = f(θ)cosθ,y = f(θ)s<strong>in</strong>θ
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 27from which we obta<strong>in</strong>dxdθdydθ= −f(θ)s<strong>in</strong>θ+f ′ (θ)cosθ = −rs<strong>in</strong>θ+ drdθ cosθ= f(θ)cosθ+f ′ (θ)cosθ = rcosθ+ drdθ s<strong>in</strong>θThus, if dx/dθ and dy/dθ arecont<strong>in</strong>uous and if dx/dθ ≠ 0, then y is a differentiable functionof x, and Formula (2.2) with θ <strong>in</strong> place of t yieldsdydx = dy/dθ rcosθ +s<strong>in</strong>θ drdx/dθ = dθ−rs<strong>in</strong>θ +cosθ drdθ(2.7)Example 2.19 F<strong>in</strong>d the slope of the tangent l<strong>in</strong>e to the cardioid r = 1+s<strong>in</strong>θ at the po<strong>in</strong>twhere θ = π/3.Solution .........Example 2.20 F<strong>in</strong>d the po<strong>in</strong>ts on the cardioid r = 1−cosθ at which there is a horizontaltangent l<strong>in</strong>e, a vertical tangent l<strong>in</strong>e, or a s<strong>in</strong>gular po<strong>in</strong>t.Solution .........Theorem 2.2 If the polar curve r = f(θ) passes through the orig<strong>in</strong> at θ = θ 0 , and ifdr/dθ ≠ 0 at θ = θ 0 , then the l<strong>in</strong>e θ = θ 0 is tangent to the curve at the orig<strong>in</strong>.Arc Length of a Polar CurveIf no segment of the polar curve r = f(θ) is traced more than once as θ <strong>in</strong>creases from α toβ, and if dr/dθ is cont<strong>in</strong>uous for α ≤ θ ≤ β, then the arc length L from θ = α to θ = β isL =∫ βα√[f(θ)]2 +[f ′ (θ)] 2 dθ =∫ βα√r 2 +( ) 2 drdθ (2.8)dθExample 2.21 F<strong>in</strong>d the arc length of the spiral r = e θ between θ = 0 and θ = π.Solution .........Example 2.22 F<strong>in</strong>d the total arc length of the cardioid r = 1+cosθ.Solution .........
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 28Area <strong>in</strong> Polar Coord<strong>in</strong>atesr = f(θ)θ = β0Rθ = αArea Problem <strong>in</strong> Polar Coord<strong>in</strong>atesSuppose that α and β are angles that satisfy the conditionα < β ≤ α+2πand suppose that f(θ) is cont<strong>in</strong>uous and nonnegative for α ≤ θ ≤ β. F<strong>in</strong>d the area of theregion R enclosed by the polar curve r = f(θ) and the rays θ = α and θ = β.Area <strong>in</strong> Polar Coord<strong>in</strong>atesIf α and β are angles that satisfy the conditionα < β ≤ α+2πand if f(θ) is cont<strong>in</strong>uous and either nonnegative or nonpositive for α ≤ θ ≤ β, then thearea A of the region R enclosed by the polar curve r = f(θ) (α ≤ θ ≤ β) and the l<strong>in</strong>esθ = α and θ = β isA =∫ βα∫ β12 [f(θ)]2 1dθ =2 r2 dθ (2.9)αThe hardest part of apply<strong>in</strong>g (2.9) is determ<strong>in</strong><strong>in</strong>g the limits of <strong>in</strong>tegration. This can bedone as follows:Step 1 Sketch the region R whose area is to be determ<strong>in</strong>ed.Step 2 Draw an arbitrary “radial l<strong>in</strong>e” from the pole to the boundary curve r = f(θ).Step 3 Ark, “Over what <strong>in</strong>tervals must θ vary <strong>in</strong> order for the radial l<strong>in</strong>e to sweep out theregion R?”Step 4 The answer <strong>in</strong> Step 3 will determ<strong>in</strong>e the lower and upper limits of <strong>in</strong>tegration.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 29Example 2.23 F<strong>in</strong>d the area of the region <strong>in</strong> the first quadrant that is with<strong>in</strong> the cardioidr = 1−cosθ.Solution .........Example 2.24 F<strong>in</strong>d the entire area with<strong>in</strong> the cardioid of Example 2.23.Solution .........Example 2.25 F<strong>in</strong>d the area enclosed by the rose curve r = cos2θ.Solution .........Example 2.26 F<strong>in</strong>d the area of the region that is <strong>in</strong>side of the cardioid r = 4−4cosθ andoutside of the circle r = 6.Solution .........
<strong>Chapter</strong> 3Three-Dimensional Space; Vectors3.1 RectangularCoord<strong>in</strong>ates<strong>in</strong>3-Space; Spheres; Cyl<strong>in</strong>dricalSurfacesRectangular Coord<strong>in</strong>ate SystemsTo beg<strong>in</strong>, consider three mutually perpendicular coord<strong>in</strong>ate l<strong>in</strong>es, called the x-axis, they-axis, and the z-axis, positioned so that their orig<strong>in</strong> co<strong>in</strong>cide.zOyxThe three coord<strong>in</strong>ate axes form a three-dimensional rectangular coord<strong>in</strong>ate system (orCartesian coord<strong>in</strong>ate system) The po<strong>in</strong>t of <strong>in</strong>tersection of the coord<strong>in</strong>ate axes is calledthe orig<strong>in</strong> of the coord<strong>in</strong>ate system.The coord<strong>in</strong>ate axes, taken <strong>in</strong> pairs, determ<strong>in</strong>e three coord<strong>in</strong>ate planes: the xyplane,the xz-plane, and the yz-plane, which divide space <strong>in</strong>to eight octants. To eachpo<strong>in</strong>t P <strong>in</strong> 3-space corresponds to ordered triple of real numbers (a,b,c) which measureits directed distances from the three planes. We call a, b, and c the x-coord<strong>in</strong>ate, y-coord<strong>in</strong>ate, and z-coord<strong>in</strong>ate of P, respectively, and we denote the po<strong>in</strong>t P by (a,b,c)or by P(a,b,c).The follow<strong>in</strong>g facts about three-dimensional rectangular coord<strong>in</strong>ate systems:30
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 31Region Descriptionxy-plane Consists of all po<strong>in</strong>ts of the form (x,y,0)xz-plane Consists of all po<strong>in</strong>ts of the form (x,0,z)yz-plane Consists of all po<strong>in</strong>ts of the form (0,y,z)x-axis Consists of all po<strong>in</strong>ts of the form (x,0,0)y-axis Consists of all po<strong>in</strong>ts of the form (0,y,0)z-axis Consists of all po<strong>in</strong>ts of the form (0,0,z)Distance <strong>in</strong> 3-Space; SpheresRecall that <strong>in</strong> 2-space the distance d between the po<strong>in</strong>ts P 1 (x 1 ,y 1 ) and P 2 (x 2 ,y 2 ) isd = √ (x 2 −x 1 ) 2 +(y 2 −y 1 ) 2The distance formula <strong>in</strong> 3-space has the same form, but it has a third term to account forthe added dimension. The distance between the po<strong>in</strong>ts P 1 (x 1 ,y 1 ,z 1 ) and P 2 (x 2 ,y 2 ,z 2 ) isd = √ (x 2 −x 1 ) 2 +(y 2 −y 1 ) 2 +(z 2 −z 1 ) 2Example 3.1 F<strong>in</strong>d the distance d between the po<strong>in</strong>ts (2,−3,4) and (−3,2,−5).Solution .........Recall that the standard equation of a circle <strong>in</strong> 2-space that has center (x 0 ,y 0 ) andradius r is(x−x 0 ) 2 +(y −y 0 ) 2 = r 2Analogously, standard equation of the sphere <strong>in</strong> 3-space that has center (x 0 ,y 0 ,z 0 )and radius r is(x−x 0 ) 2 +(y −y 0 ) 2 +(z −z 0 ) 2 = r 2 (3.1)Iftheterms<strong>in</strong>(3.1)areexpandedandliketermsarecollected, thentheresult<strong>in</strong>gequationhas the formx 2 +y 2 +z 2 +Gx+Hy +Iz +J = 0 (3.2)Example 3.2 F<strong>in</strong>d the center and radius of the sphereSolution .........x 2 +y 2 +z 2 −10x−8y −12z +68 = 0In general, complet<strong>in</strong>g the squares <strong>in</strong> (3.2) produces an equation of the form(x−x 0 ) 2 +(y −y 0 ) 2 +(z −z 0 ) 2 = k 2• If k > 0, then the graph of this equation is a sphere with center (x 0 ,y 0 ,z 0 ) and radius√k.• If k = 0, then the sphere has radius zero, so the graph is the s<strong>in</strong>gle po<strong>in</strong>t (x 0 ,y 0 ,z 0 ).
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 32• If k < 0, the equation is not satisfied by any values of x, y, and z, so it has no graph.Theorem 3.1 An equation of the formx 2 +y 2 +z 2 +Gx+Hy +Iz +J = 0represents a sphere, a po<strong>in</strong>t, or has no graph.Cyl<strong>in</strong>drical SurfacesTheorem 3.2 An equation that conta<strong>in</strong>s only two of the variables x, y, and z represents acyl<strong>in</strong>drical surface <strong>in</strong> an xyz-coord<strong>in</strong>ate system. The surface can be obta<strong>in</strong>ed by graph<strong>in</strong>gthe equation <strong>in</strong> the coord<strong>in</strong>ate plane of the two variables that appear <strong>in</strong> the equation andthen translat<strong>in</strong>g that graph parallel to the axis of the miss<strong>in</strong>g variable.Example 3.3 Sketch the graph of x 2 +z 2 = 1 <strong>in</strong> 3-space.Solution .........Example 3.4 Sketch the graph of z = s<strong>in</strong>y <strong>in</strong>3-space.Solution .........3.2 VectorsMany physical quantities such as area, length, mass, and temperature are completely describedonce the magnitude of the quantity is given. Such quantities are called scalar.Other physical quantities, called vectors are not completely determ<strong>in</strong>ed until both magnitudeand a direction are specified.Vectors can be represented geometrically by arrows <strong>in</strong> 2-space or 3-space: the directionof the arrow specifies the direction of the vector and the length of the arrow describes itsmagnitude. The tail of the arrow is called the the <strong>in</strong>itial po<strong>in</strong>t of the vector, and the tipof the arrow the term<strong>in</strong>al po<strong>in</strong>t.We will denote vectors with lowercase boldface type such as a, k, v, w, and x. Whendiscuss<strong>in</strong>g vectors, we will refer to real numbers as scalars. Scalar will be denoted bylowercase italic type such as a, k, w, and x.Two vectors, v and w, are considered to be equal (also called equivalent) if theyhave the same length and same direction, <strong>in</strong> which case we write v = w. Geometrically,two vectors are equal if they are translations of one another; thus, the three vectors <strong>in</strong> thefollow<strong>in</strong>g figure are equal, even though they are <strong>in</strong> different positions.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 33If the <strong>in</strong>itial po<strong>in</strong>t of v is A and the term<strong>in</strong>al po<strong>in</strong>t is B, then we write v = −→ AB whenwe want to emphasize the <strong>in</strong>itial and term<strong>in</strong>al po<strong>in</strong>ts.•BA •If the <strong>in</strong>itial and term<strong>in</strong>al po<strong>in</strong>ts of a vector co<strong>in</strong>cide, then the vector has length zero;we call this the zero vector and denote it by 0. The zero vector does not have a specificdirection, so we will agree that it can be assigned any convenient direction <strong>in</strong> a specificproblem.Def<strong>in</strong>ition 3.1 If v and w are vectors, then the sum v+w is the vector from the <strong>in</strong>itialpo<strong>in</strong>t of v to the term<strong>in</strong>al po<strong>in</strong>t of w when the vectors are positioned so the <strong>in</strong>itial po<strong>in</strong>t ofw is at the term<strong>in</strong>al po<strong>in</strong>t of v.wvv+wDef<strong>in</strong>ition 3.2 If v is a nonzero vector and k is a nonzero real number (a scalar), thenthe scalar multiple kv is def<strong>in</strong>ed to be the vector whose length is |k| times the length ofv and whose direction is the same as that of v if k > 0 and opposite to that of v if k < 0.We def<strong>in</strong>e kv = 0 if k = 0 or v = 0.v2v1v 2(−1)v(− 3 2 )vObserve that if k and v are nonzero, then the vectors v and kv lie on the same l<strong>in</strong>e iftheir <strong>in</strong>itial po<strong>in</strong>ts co<strong>in</strong>cide and lies on parallel or co<strong>in</strong>cident l<strong>in</strong>es if they do not. Thus, wesay that v and kv are parallel vectors. Observe also that the vector (−1)v has the samelength as v but is oppositely directed. We call (−1)v the negative of v and denote it by−v. In particular, −0 = (−1)0 = 0.Vector subtraction is def<strong>in</strong>ed <strong>in</strong> terms of addition and scalar multiplication byv−w = v+(−w)In the special case where v = w, their difference is 0; that is,v+(−v) = v−v = 0
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 34Vectors <strong>in</strong> Coord<strong>in</strong>ate SystemsIf a vector v is positioned with its <strong>in</strong>itial po<strong>in</strong>t at the orig<strong>in</strong> of the rectangular coord<strong>in</strong>atesystem, then the term<strong>in</strong>al po<strong>in</strong>t will have coord<strong>in</strong>ates of the form (v 1 ,v 2 ) or (v 1 ,v 2 ,v 3 ),depend<strong>in</strong>g on whether the vector is <strong>in</strong> 2-space or 3-space. We call these coord<strong>in</strong>ates thecomponents of v, and we write v <strong>in</strong> component form us<strong>in</strong>g the bracket notationv = 〈v 1 ,v 2 〉 or v = 〈v 1 ,v 2 ,v 3 〉In particular, the zero vectors <strong>in</strong> 2-space and 3-space arerespectively.v = 〈0,0〉 and v = 〈0,0,0〉yz• (v 1 ,v 2 )• (v 1 ,v 2 ,v 3 )vvxyTheorem 3.3 Two vectors are equivalent if and only if their correspond<strong>in</strong>g components areequal.xFor example,〈a,b,c〉 = 〈−2,3,5〉if and only if a = −2, b = 3, and c = 5.Arithmetic Operations on VectorsTheorem 3.4 If v = 〈v 1 ,v 2 〉 and w = 〈w 1 ,w 2 〉 are vectors <strong>in</strong> 2-space and k is any scalar,thenv+w = 〈v 1 +w 1 ,v 2 +w 2 〉v−w = 〈v 1 −w 1 ,v 2 −w 2 〉kv = 〈kv 1 ,kv 2 〉Similarly, if v = 〈v 1 ,v 2 ,v 3 〉 and w = 〈w 1 ,w 2 ,w 3 〉 are vectors <strong>in</strong> 3-space and k is any scalar,thenv+w = 〈v 1 +w 1 ,v 2 +w 2 ,v 3 +w 3 〉v−w = 〈v 1 −w 1 ,v 2 −w 2 ,v 3 −w 3 〉kv = 〈kv 1 ,kv 2 ,kv 3 〉
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 35Example 3.5 If v = 〈−1,2,−3〉 and w = 〈2,0,−4〉, thenv+w =3v =−2w =w−3v =Vectors With Initial Po<strong>in</strong>t Not At The Orig<strong>in</strong>Suppose that P 1 (x 1 ,y 1 ) and P 2 (x 2 ,y 2 ) are po<strong>in</strong>ts <strong>in</strong> 2-space and we <strong>in</strong>terested <strong>in</strong> f<strong>in</strong>d<strong>in</strong>gthe components of the vector −−→ P 1 P 2 . As illustrated <strong>in</strong> the follow<strong>in</strong>g figure, we can write thisvector as−−→P 1 P 2 = −−→ OP 2 − −−→ OP 1 = 〈x 2 ,y 2 〉−〈x 1 ,y 1 〉 = 〈x 2 −x 1 ,y 2 −y 1 〉yP 1 (x 1 ,y 1 )•−−→OP 1−−−→P 1 P 2−−→ OP2P 2 (x 2 ,y 2 )•OThus, wehaveshownthatthecomponentsofthevector −−→ P 1 P 2 canbeobta<strong>in</strong>edbysubtract<strong>in</strong>gthe coord<strong>in</strong>ates of its <strong>in</strong>itial po<strong>in</strong>t from the coord<strong>in</strong>ates of its term<strong>in</strong>al po<strong>in</strong>t. Similarcomputations hold <strong>in</strong> 3-space, so we have established the follow<strong>in</strong>g result.Theorem 3.5 If −−→ P 1 P 2 is a vector <strong>in</strong> 2-space with <strong>in</strong>itial po<strong>in</strong>t P 1 (x 1 ,y 1 ) and term<strong>in</strong>al po<strong>in</strong>tP 2 (x 2 ,y 2 ), then−−→P 1 P 2 = 〈x 2 −x 1 ,y 2 −y 1 〉Similarly, if −−→ P 1 P 2 is a vector <strong>in</strong> 3-space with <strong>in</strong>itial po<strong>in</strong>t P 1 (x 1 ,y 1 ,z 1 ) and term<strong>in</strong>al po<strong>in</strong>tP 2 (x 2 ,y 2 ,z 2 ), then−−→P 1 P 2 = 〈x 2 −x 1 ,y 2 −y 1 ,z 2 −z 1 〉Example 3.6 In 2-space the vector from P 1 (3,2) to P 2 (−1,4) is−−→P 1 P 2 = 〈−1−3,4−2〉 = 〈−4,2〉xand <strong>in</strong> 3-space the vector from A(1,−2,0) to B(−3,1,2) is−→AB = 〈1−(−3),−2−1,0−2〉 = 〈4,−3,−2〉✠
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 36Rules of Vector ArithmeticTheorem 3.6 For any vectors u, v, and w and any scalars k and l, the follow<strong>in</strong>g relationshipshold:(a) u+v = v+u(b) (u+v)+w = u+(v+w)(c) u+0 = 0+u = u(d) u+(−u) = 0(e) k(lu) = (kl)u(f) k(u+v) = ku+kv(g) (k +l)u = ku+lu(h) 1u = uNorm of a VectorThe distance between the <strong>in</strong>itial and term<strong>in</strong>al po<strong>in</strong>ts of a vector v is called the length, thenorm, or the magnitude of v and is denoted by ‖v‖. This distance does not change ifthe vector is translated. The norm of a vector v = 〈v 1 ,v 2 〉 <strong>in</strong> 2-space is given by‖v‖ =√v 2 1 +v 2 2and the norm of a vector v = 〈v 1 ,v 2 ,v 3 〉 <strong>in</strong> 3-space is given by‖v‖ =√v 2 1 +v2 2 +v2 3Example 3.7 F<strong>in</strong>d the norm of v = 〈4,−2〉, and w = 〈−1,3,5〉.Solution .........is,For any vector v and scalar k, the length of kv must be |k| times the length of v; that‖kv‖ = |k|‖v‖Thus, for example,‖5v‖ = |5|‖v‖ = 5‖v‖‖−3v‖ = |−3|‖v‖ = 3‖v‖‖−v‖ = |−1|‖v‖ = ‖v‖This applies to vectors <strong>in</strong> 2-space and 3-space.Unit VectorsA vector of length 1 is called a unit vector. In an xy-coord<strong>in</strong>ate system the unit vectorsalong the x-axis and y-axis are denoted by i and j, respectively; and <strong>in</strong> xyz-coord<strong>in</strong>ate
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 37system the unit vectors along the x-axis, y-axis and z-axis are denoted by i, j, and k,respectively.yz(0,1)(0,0,1)ji (1,0)xikj(0,1,0)yThus,x(1,0,0)i = 〈1,0〉, j = 〈0,1〉 In 2-spacei = 〈1,0,0〉, j = 〈0,1,0〉, k = 〈0,0,1〉 In 3-spaceEvery vector <strong>in</strong> 2-space is expressible uniquely <strong>in</strong> terms of i and j, and every vector <strong>in</strong>3-space is expressible uniquely <strong>in</strong> terms of i, j, and k as follows:Example 3.8v = 〈v 1 ,v 2 〉 = 〈v 1 ,0〉+〈0,v 2 〉 = v 1 〈1,0〉+v 2 〈0,1〉 = v 1 i+v 2 jv = 〈v 1 ,v 2 ,v 3 〉 = v 1 〈1,0,0〉+v 2 〈0,1,0〉+v 3 〈0,0,1〉 = v 1 i+v 2 j+v 3 k2-space〈3,−4〉 = 3i−4j3-space〈2,3,−5〉 = 2i+3j−5k〈5,0〉 = 5i+0j = 5i 〈0,0,3〉 = 3k〈0,0〉 = 0i+0j = 0 〈0,0,0〉 = 0i+0j+0k = 0(3i−2j)+(i+4j) = 2i+2j3(2i−4j) = 6i−12j(2i−j+3k)+(3i+2j−k) = i+j+2k2(3i+4j−k) = 6i+8j−2k‖3i+4j‖ = √ 3 2 +4 2 = 5 ‖2i−j+3k‖ = √ 2 2 +(−1) 2 +3 2 = √ 14‖v 1 i+v 2 j‖ = √ v 2 1 +v2 2 ‖〈v 1 ,v 2 ,v 3 〉‖ = √ v 2 1 +v2 2 +v2 3Normaliz<strong>in</strong>g a VectorA common problem <strong>in</strong> applications is to f<strong>in</strong>d a unit vector u that has the same directionas some given nonzero vector v. This can be done by multiply<strong>in</strong>g v by the reciprocal of itslength; that is,u = 1‖v‖ v = v‖v‖
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 403.3 Dot Product; ProjectionDef<strong>in</strong>ition of the Dot ProductDef<strong>in</strong>ition 3.3 If u = 〈u 1 ,u 2 〉 and v = 〈v 1 ,v 2 〉 are vectors <strong>in</strong> 2-space, then the dotproduct of u and v is written as u·v and is def<strong>in</strong>ed asu·v = u 1 v 1 +u 2 v 2Similarly, if u = 〈u 1 ,u 2 ,u 3 〉 and v = 〈v 1 ,v 2 ,v 3 〉 are vectors <strong>in</strong> 3-space, then their dotproduct is def<strong>in</strong>ed asu·v = u 1 v 1 +u 2 v 2 +u 3 v 3Note that the dot product of two vectors is a scalar. For example,〈4,−3〉·〈3,2〉 = (4)(3)+(−3)(2) = 6〈1,2,−3〉·〈4,−1,2〉 = (1)(4)+(2)(−1)+(−3)(2) = −4Algebraic Properties of the Dot ProductTheorem 3.7 If u, v, and w are vectors <strong>in</strong> 2-space or 3-space and k is a scalar, then:(a) u·v = v·u(b) u·(v+w) = u·v+u·w(c) k(u·v) = (ku)·v = u·(kv)(d) v·v = ‖v‖ 2(e) 0·v = 0Angle Between VectorsSuppose that u and v are nonzero vectors <strong>in</strong> 2-space or 3-space that are positioned so their<strong>in</strong>itial po<strong>in</strong>tsco<strong>in</strong>cide. Wedef<strong>in</strong>e the angle between u and v tobe theangleθ determ<strong>in</strong>edby the vectors that satisfies the condition 0 ≤ θ ≤ π.uθvuθvuθvuθvTheorem 3.8 If u and v are nonzero vectors <strong>in</strong> 2-space or 3-space, and if θ is the anglebetween them, thencosθ = u·v(3.5)‖u‖‖v‖
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 41Example 3.13 F<strong>in</strong>d the angle between(a) u = 〈4,−3,−1〉 and v = 〈−2,−3,5〉(b) u = −4i+5j+k and v = 2i+3j−7k(c) u = i−2j+2k and v = −3i+6j−6kSolution .........Example 3.14 F<strong>in</strong>d the angle ABC if A = (1,−2,3), B = (2,4,−6), and C = (5,−3,2).A(1,−2,3)θB(2,4,−6)C(5,−3,2)Solution .........Interpret<strong>in</strong>g the Sign of the Dot ProductIt will often be convenient to express Formula (3.5) asu·v = ‖u‖‖v‖cosθ (3.6)which expresses the dot product of u and v <strong>in</strong> terms of the lengths of these vectors andthe angle between them. S<strong>in</strong>ce u and v are assumed to be nonzero vectors, this version ofthe formula make it clear that the sign of u·v is the same as the sign of cosθ. Thus, wecan tell from the dot product whether the angle between two vectors is acute or obtuse orwhether the vectors are perpendicular.uθvuθvuθvu·v > 0u·v < 0u·v = 0Direction AnglesIn both 2-space and 3-space the angle between a nonzero vector v and the vectors i, j,and k are called the direction angles of v, and the cos<strong>in</strong>es of these angles are called thedirection cos<strong>in</strong>es of v. Formulas for the direction cos<strong>in</strong>es of a vector can be obta<strong>in</strong>edform Formula (3.5). For example, if v = v 1 i+v 2 j+v 3 k, thencosα = v·i‖v‖‖i‖ = v 1 v·j, cosβ =‖v‖ ‖v‖‖j‖ = v 2 v·k, cosγ =‖v‖ ‖v‖‖k‖ = v 3‖v‖
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 42yzjvkvβαixγαβjyxiTheorem 3.9 The direction cos<strong>in</strong>es of a nonzero vector v = v 1 i+v 2 j+v 3 k arecosα = v 1‖v‖ , cosβ = v 2‖v‖ , cosγ = v 3‖v‖The direction cos<strong>in</strong>es of a vector v = v 1 i+v 2 j+v 3 k can be computed by normaliz<strong>in</strong>gv and read<strong>in</strong>g off the components of v/‖v‖, s<strong>in</strong>cev‖v‖ = v 1‖v‖ i+ v 2‖v‖ j+ v k‖v‖ k = (cosα)i+(cosβ)j+(cosγ)kMoreover, we can show that the direction cos<strong>in</strong>es of a vector satisfy the equationcos 2 α+cos 2 β +cos 2 γ = 1Example 3.15 F<strong>in</strong>d the direction angles of the vector v = 4i−5j+3k.Solution .........Decompos<strong>in</strong>g Vectors <strong>in</strong>to Orthogonal ComponentsOur next objective is to develop a computational procedure for decompos<strong>in</strong>g a vector <strong>in</strong>tosum of orthogonal vectors. For this purpose, suppose that e 1 and e 2 are two orthogonalunit vectors <strong>in</strong> 2-space, and suppose that we want to express a given vector v as a sumv = w 1 +w 2so that w 1 is a scalar multiple of e 1 and w 2 is a scalar multiple of e 2 .w 2e 2ve 1 w 1
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 43That is, we want to f<strong>in</strong>d scalars k 1 and k 2 such thatv = k 1 e 1 +k 2 e 2 (3.7)We can f<strong>in</strong>d k 1 by tak<strong>in</strong>g the dot product of v with e 1 . This yieldsSimilarly,v·e 1 = (k 1 e 1 +k 2 e 2 )·e 1= k 1 (e 1 ·e 1 )+k 2 (e 2 ·e 1 )= k 1 ‖e 1 ‖ 2 +0 = k 1v·e 2 = (k 1 e 1 +k 2 e 2 )·e 2 = k 1 (e 1 ·e 2 )+k 2 (e 2 ·e 2 ) = 0+k 2 ‖e 2 ‖ 2 = k 2Substitut<strong>in</strong>g these expressions for k 1 and k 2 <strong>in</strong> (3.7) yieldsv = (v·e 1 )e 1 +(v·e 2 )e 2 (3.8)In this formula we call (v·e 1 )e 1 and (v·e 2 )e 2 the vector components of v along e 1 ande 2 , respectively; and we call v · e 1 and v · e 2 the scalar components of v along e 1 ande 2 , respectively.If θ denote the angle between v and e 1 , thenv·e 1 = ‖v‖cosθ and v·e 2 = ‖v‖s<strong>in</strong>θand the decomposition (3.7) can be expressed asExample 3.16 Letv = 〈2,3〉, e 1 =v = (‖v‖cosθ)e 1 +(‖v‖s<strong>in</strong>θ)e 2 (3.9)〈 1 √2 ,〉 〈1√ , and e 2 = −√ 1 ,2 2〉1√2F<strong>in</strong>d the scalar components of v along e 1 and e 2 and the vector components of v along e 1and e 2 .Solution .........Example 3.17 A rope is attached to a 100-lb block on a ramp that is <strong>in</strong>cl<strong>in</strong>ed at an angleof 30 ◦ with the ground.30 ◦How much force does the block exert aga<strong>in</strong>st the ramp, and how much force must be appliedto the rope <strong>in</strong> a direction parallel to the ramp to prevent the block from slid<strong>in</strong>g down theramp?Solution .........
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 44Orthogonal ProjectionsThevectorcomponentsofv alonge 1 ande 2 <strong>in</strong>(3.8)arealsocalledtheorthogonal projectionsof v on e 1 and e 2 and are denoted byproj e1v = (v·e 1 )e 1 and proj e2v = (v·e 2 )e 2In general, if e is a unit vector, then we def<strong>in</strong>e the orthogonal projection of v on e tobeproj e v = (v·e)e (3.10)The orthogonal projection of v on an arbitrary nonzero vector b can be obta<strong>in</strong>ed by normaliz<strong>in</strong>gb and then apply<strong>in</strong>g Formula (3.10); that is,( )( )b bproj b v = v·‖b‖ ‖b‖which can be rewritten asproj b v = v·b‖b‖ 2 b (3.11)Moreover, if we subtract proj b v from v, then the result<strong>in</strong>g vectorv−proj b vwill be orthogonal to b; we call this the vector component of v orthogonal to b.v−proj b vvvv−proj b vbproj b vproj b vbAcute angle between v and bObtuse angle between v and bExample 3.18 F<strong>in</strong>d the orthogonal projection of v = i +j+k on b = 2i+2j, and thenf<strong>in</strong>d the vector component of v orthogonal to b.Solution .........WorkRecall that we def<strong>in</strong>e the work W done on the object by a constant force of magnitude Fact<strong>in</strong>g <strong>in</strong> the direction of motion over the distance d to beW = Fd = force × distance (3.12)If we let F denote a force vector of magnitude ‖F‖ = F act<strong>in</strong>g <strong>in</strong> the direction of motion,then we can write (3.12) asW = ‖F‖d
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 45Moreover, if we assume that the object moves along a l<strong>in</strong>e from po<strong>in</strong>t P to po<strong>in</strong>t Q, thend = ‖ −→ PQ‖, so that the work can be expressed entirely <strong>in</strong> vector form asW = ‖F‖‖ −→ PQ‖The vector −→ PQ is called the displacement vector for the object.In the case where a constant force F is not <strong>in</strong> the direction of motion, but rather makesan angle θ with the displacement vector, then we def<strong>in</strong>e the work W done by F to beW = (‖F‖cosθ)‖ −→ PQ‖ = F·−→ PQ (3.13)•P‖F‖FWork = ‖F‖‖ −→ PQ‖•Q•P‖F‖Fθ‖F‖cosθWork = (‖F‖cosθ)‖ −→ PQ‖•QExample 3.19 A force F = 8i + 5j <strong>in</strong> pound moves an object from P(1,0) to Q(7,1),distance measured <strong>in</strong> feet. How much work is done?Solution .........Example 3.20 A wagon is pulled horizontally by exert<strong>in</strong>g a constant force of 10lb on thehandle at an angle of 60 ◦ with the horizontal. How much work is done <strong>in</strong> mov<strong>in</strong>g the wagon50 ft?Solution .........3.4 Cross ProductDeterm<strong>in</strong>antsBefore we def<strong>in</strong>e the cross product, we need to def<strong>in</strong>e the notion of determ<strong>in</strong>ant.Def<strong>in</strong>ition 3.4 The determ<strong>in</strong>ant of a 2×2 matrix of real number is def<strong>in</strong>ed by∣ a ∣1 a 2∣∣∣= ab 1 b 1 b 2 −a 2 b 1 .2Def<strong>in</strong>ition 3.5 The determ<strong>in</strong>ant of a 3×3 matrix of real number is def<strong>in</strong>ed as a comb<strong>in</strong>ationof three 2×2 determ<strong>in</strong>ants, as follows:∣ a 1 a 2 a 3∣∣∣∣∣∣ ∣ ∣ ∣ ∣ ∣ ∣∣∣ b b 1 b 2 b 3 = a 2 b 3∣∣∣∣∣∣ b1 −a 1 b 3∣∣∣∣∣∣ b∣ cc 1 c 2 c 2 c 2 +a 1 b 2∣∣∣3 c 1 c 3 (3.14)3 c 1 c 23Note that Equation (3.14) is referred to as an expansion of the determ<strong>in</strong>ant alongthe first row.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 46Cross ProductWe now turn to the ma<strong>in</strong> concept <strong>in</strong> this section.Def<strong>in</strong>ition 3.6 If u = 〈u 1 ,u 2 ,u 3 〉 and v = 〈v 1 ,v 2 ,v 3 〉 are vectors <strong>in</strong> 3-space, then thecross product u×v is the vector def<strong>in</strong>ed byu×v =∣ u ∣ 2 u 3∣∣∣i−v 2 v 3∣ u ∣ 1 u 3∣∣∣j+v 1 v 3∣ u ∣1 u 2∣∣∣k (3.15)v 1 v 2or, equivalently,u×v = (u 2 v 3 −u 3 v 2 )i−(u 1 v 3 −u 3 v 1 )j+(u 1 v 2 −u 2 v 1 )k (3.16)Observe that the right side of Formula (3.15) can be written as∣ i j k ∣∣∣∣∣u×v =u 1 u 2 u 3(3.17)∣v 1 v 2 v 3Example 3.21 Let u = 〈1,2,3〉 and v = 〈4,5,6〉. F<strong>in</strong>d (a) u×v and (b) v×u.Solution .........Algebraic Properties of the Cross Product• The cross product is def<strong>in</strong>ed only for vectors <strong>in</strong> 3-space, whereas the dot product isdef<strong>in</strong>ed for vectors <strong>in</strong> 2-space and 3-space.• The cross product of two vectors is a vector, whereas the dot product of two vectorsis a scalar.The ma<strong>in</strong> algebraic properties of the cross product are listed <strong>in</strong> the follow<strong>in</strong>g theorem.Theorem 3.10 If u, v, and w are any vectors <strong>in</strong> 3-space and k is any scalar, then:(a) u×v = −(v ×u)(b) u×(v+w) = (u×v)+(u×w)(c) (u+v)×w = (u×w)+(v×w)(d) k(u×v) = (ku)×v = u×(kv)(e) u×0 = 0×u = 0(f) u×u = 0
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 47The follow<strong>in</strong>g cross products occur so frequently that it is helpful to be familiar withthem:i×j = k j×k = i k×i = j(3.18)j×i = −k k×j = −i i×k = −jThese results are easy to obta<strong>in</strong>; for example,i j k∣ ∣ ∣ ∣∣∣i×j =1 0 0∣0 1 0∣ = 0 0∣∣∣ 1 0∣ i− 1 0∣∣∣ 0 0∣ j+ 1 00 1∣ kHowever, rather than comput<strong>in</strong>g these cross products each time you need them, you canuse the diagram <strong>in</strong> Figure below.kijGeometric Properties of the Cross ProductThe follow<strong>in</strong>g theorem shows that the cross product of two vectors is orthogonal to bothfactors.Theorem 3.11 If u and v are vectors <strong>in</strong> 3-space, then:(a) u·(u×v) = 0 (u×v is orthogonal to u)(b) v·(u×v) = 0 (u×v is orthogonal to v)Example 3.22 Let u and v be vectors as <strong>in</strong> Example 3.21. Show that u×v is orthogonalto both u and v.Solution .........Theorem 3.12 Let u and v be nonzero vectors <strong>in</strong> 3-space, and let θ be the angle betweenthese vectors when they are positioned so their <strong>in</strong>itial po<strong>in</strong>ts co<strong>in</strong>cide.(a) ‖u×v‖ = ‖u‖‖v‖s<strong>in</strong>θ(b) The area A of the parallelogram that has u and v as adjacent sides isA = ‖u×v‖ (3.19)(c) u×v = 0 if and only if u and v are parallel vectors, that is, if and only if they arescalar multiples of one another.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 48Example 3.23 F<strong>in</strong>d the area of the parallelogram with two adjacent sides formed by thevectors u = 〈1,2,−2〉 and v = 〈3,0,1〉.Solution .........Example 3.24 F<strong>in</strong>d the area of the triangle that is determ<strong>in</strong>ed by the po<strong>in</strong>ts P 1 (2,2,0),P 2 (−1,0,2), and P 3 (0,4,3).Solution .........Scalar Triple ProductsIf u = 〈u 1 ,u 2 ,u 3 〉, v = 〈v 1 ,v 2 ,v 3 〉, and w = 〈w 1 ,w 2 ,w 3 〉 are vectors <strong>in</strong> 3-space, then thenumberu·(v×w)is called the scalar triple product of u, v, and w. This value can be obta<strong>in</strong>ed directlyfrom the formula∣ u 1 u 2 u 3∣∣∣∣∣u·(v×w) =v 1 v 2 v 3(3.20)∣w 1 w 2 w 3Example 3.25 Calculate the scalar triple product u·(v×w) of the vectorsSolution .........u = 3i−2j−5k, v = i+4j−4k, w = 3j+2kGeometric Properties of the Scalar Triple ProductTheorem 3.13 Let u, v and w be nonzero vectors <strong>in</strong> 3-space.(a) The volume V of the parallelepiped that has u, v and w as adjacent edges isV = |u·(v×w)| (3.21)(b) u·(v×w) = 0 if and only if u, v and w lie <strong>in</strong> the same plane.Example 3.26 F<strong>in</strong>d the volume of the parallelepiped with three adjacent edges formed bythe vectors u = 〈7,8,0〉, v = 〈1,2,3〉 and w = 〈4,5,6〉.Solution .........Algebraic Properties of the Scalar Triple Productu·(v×w) = w·(u×v) = v·(w×u)u·v×w = u×v·w
••••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 493.5 Parametric Equation of L<strong>in</strong>esL<strong>in</strong>es Determ<strong>in</strong>ed by a Po<strong>in</strong>t and a VectorA l<strong>in</strong>e <strong>in</strong> 2-space or 3-space can be determ<strong>in</strong>ed uniquely by specify<strong>in</strong>g a po<strong>in</strong>t on the l<strong>in</strong>eand a nonzero vector parallel to the l<strong>in</strong>e.yzLLvP(x 0 ,y 0 )(a,b)xP 0 (x 0 ,y 0 ,z 0 )v(a,b,c)yFor example, consider a l<strong>in</strong>e L <strong>in</strong> 3-space that passes through the po<strong>in</strong>t P 0 (x 0 ,y 0 ,z 0 ) andis parallel to the nonzero vector v = 〈a,b,c〉. Then L consists precisely of those po<strong>in</strong>tP(x,y,z) for which the vector −−→ P 0 P is parallel to v.zP 0 (x 0 ,y 0 ,z 0 )vxP•L(a,b,c)yxIn other words, the po<strong>in</strong>t P(x,y,z) is on L if and only if −−→ P 0 P is a scalar multiple of v, sayThis equation can be written aswhich implies that−−→P 0 P = tv〈x−x 0 ,y −y 0 ,z −z 0 〉 = 〈ta,tb,tc〉x−x 0 = ta, y −y 0 = tb, z −z 0 = tcThus, L can be described by the parametric equationsx = x 0 +at, y = y 0 +bt, z = z 0 +ctA similar description applies to l<strong>in</strong>es <strong>in</strong> 2-space.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 50Theorem 3.14(a) The l<strong>in</strong>e <strong>in</strong> 2-space that passes through the po<strong>in</strong>t P 0 (x 0 ,y 0 ) and is parallel to thenonzero vector v = 〈a,b〉 = ai+bj has parametric equationsx = x 0 +at, y = y 0 +bt (3.22)(b) The l<strong>in</strong>e <strong>in</strong> 3-space that passes through the po<strong>in</strong>t P 0 (x 0 ,y 0 ,z 0 ) and is parallel to thenonzero vector v = 〈a,b,c〉 = ai+bj+ck has parametric equationsx = x 0 +at, y = y 0 +bt, z = z 0 +ct (3.23)Example 3.27 F<strong>in</strong>d parametric equations of the l<strong>in</strong>e pass<strong>in</strong>g through the po<strong>in</strong>t (1,5,2) andparallel to the vector v = 〈4,3,7〉. Also, determ<strong>in</strong>e where the l<strong>in</strong>e <strong>in</strong>tersects the yz-plane.Solution .........Example 3.28 F<strong>in</strong>dparametricequationsof the l<strong>in</strong>eLpass<strong>in</strong>gthrough the po<strong>in</strong>tP(1,2,−1)and Q(5,−3,4).Solution .........Example 3.29 Let L 1 and L 2 be the l<strong>in</strong>es(a) Are the l<strong>in</strong>es parallel?(b) Do the l<strong>in</strong>es <strong>in</strong>tersect?Solution .........L 1 : x = 1+4t, y = 5−4t, z = −1+5tL 2 : x = 2+8s, y = 4−3s, z = 5+sTwo l<strong>in</strong>es <strong>in</strong> 3-space that are not parallel and do not <strong>in</strong>tersect are called skew l<strong>in</strong>es.L<strong>in</strong>e SegmentsSometimes one is not <strong>in</strong>terested <strong>in</strong> an entire l<strong>in</strong>e, but rather some segment of a l<strong>in</strong>e. Parametricequations of a l<strong>in</strong>e segment can be obta<strong>in</strong>ed by f<strong>in</strong>d<strong>in</strong>g parametric equation for theentire l<strong>in</strong>e, then restrict<strong>in</strong>g the parameter appropriately so that only the desired segment isgenerated.Example 3.30 F<strong>in</strong>d parametric equations describ<strong>in</strong>g the l<strong>in</strong>e segment jo<strong>in</strong><strong>in</strong>g the po<strong>in</strong>tsP(1,2,−1) and Q(5,−3,4).Solution .........
••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 51Vector Equations of L<strong>in</strong>esWe will now show how vector notation can be used to express the parametric equations ofa l<strong>in</strong>e. Because two vectors are equal if and only if their components are equal, (3.22) and(3.23) can be written <strong>in</strong> vector form asor, equivalently, as〈x,y〉 = 〈x 0 +at,y 0 +bt〉〈x,y,z〉 = 〈x 0 +at,y 0 +bt,z 0 +ct〉〈x,y〉 = 〈x 0 ,y 0 〉+t〈a,b〉 (3.24)〈x,y,z〉 = 〈x 0 ,y 0 ,z 0 〉+t〈a,b,c〉 (3.25)For the equation <strong>in</strong> 2-space we def<strong>in</strong>e the vectors r, r 0 and v asand for the equation <strong>in</strong> 3-space we def<strong>in</strong>e them asr = 〈x,y〉, r 0 = 〈x 0 ,y 0 〉, v = 〈a,b〉 (3.26)r = 〈x,y,z〉, r 0 = 〈x 0 ,y 0 ,z 0 〉, v = 〈a,b,c〉 (3.27)Substitut<strong>in</strong>g (3.26) and (3.27) <strong>in</strong> (3.24) and (3.25), respectively, yields the equationr = r 0 +tv (3.28)<strong>in</strong> both case. We call this the vector equation of a l<strong>in</strong>e <strong>in</strong> 2-space or 3-space. In thisequation, v is a nonzero vector parallel to the l<strong>in</strong>e, and r 0 is a vector whose componentsare the coord<strong>in</strong>ates of a po<strong>in</strong>t on the l<strong>in</strong>e.ytvLr 0P 0vrtvxExample 3.31 The equationis of form (3.28) with〈x,y,z〉 = 〈−1,0,2〉+t〈1,5,−4〉r 0 = 〈−1,0,2〉, v = 〈1,5,−4〉Thus, the equation represents the l<strong>in</strong>e <strong>in</strong> 3-space that passes through the po<strong>in</strong>t (−1,0,2) andis parallel to the vector 〈1,5,−4〉.✠Example 3.32 F<strong>in</strong>d an equation of the l<strong>in</strong>e <strong>in</strong> 3-space that passes through the po<strong>in</strong>tsP 1 (2,4,−1) and P 2 (5,0,7).Solution .........
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 523.6 Plane <strong>in</strong> 3-SpacePlane Parallel to the Coord<strong>in</strong>ate PlanesThe graph of the equation x = a <strong>in</strong> an xyz-coord<strong>in</strong>ate system consists of all po<strong>in</strong>ts of theform (a,y,z), where y and z are arbitrary. One such po<strong>in</strong>t is (a,0,0), and all others are<strong>in</strong> the plane that passes through this po<strong>in</strong>t and is parallel to the yz-plane. Similarly, thegraph of y = b is the plane through (0,b,0) that is parallel to the xz-plane, and the graphof z = c is the plane through (0,0,c) that is parallel to the xy-plane.(a,0,0)x = ay = b•(0,b,0)•(0,0,c)z = cPlanes Determ<strong>in</strong>ed by a Po<strong>in</strong>t and a Normal VectorA plane <strong>in</strong> 3-space can be determ<strong>in</strong>ed uniquely by specify<strong>in</strong>g a po<strong>in</strong>t <strong>in</strong> the plane and avector perpendicular to the plane. A vector perpendicular to the plane is called a normalto the plane.Suppose that we want to f<strong>in</strong>d an equation of the plane pass<strong>in</strong>g through P 0 (x 0 ,y 0 ,z 0 )and perpendicular to the vector n = 〈a,b,c〉. Def<strong>in</strong>e the vectors r 0 and r asr 0 = 〈x 0 ,y 0 ,z 0 〉 and r = 〈x,y,z〉nP 0 (x 0 ,y 0 ,z 0 ) •r−r 0 • P(x,y,z)r r 0OIt should be evident from the above Figure that the plane consists precisely of those po<strong>in</strong>tsP(x,y,z) for which the vector r−r 0 is orthogonal to n; or, expressed as an equation,n·(r−r 0 ) = 0 (3.29)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 53If preferred, we can express this vector equation <strong>in</strong> terms of components as〈a,b,c〉·〈x−x 0 ,y −y 0 ,z −z 0 〉 = 0 (3.30)from which we obta<strong>in</strong>a(x−x 0 )+b(y −y 0 )+c(z −z 0 ) = 0 (3.31)This is called the po<strong>in</strong>t-normal form of the equation of a plane. Formula (3.29) and(3.30) are vector version of this formula.Example 3.33 F<strong>in</strong>d an equation of the plane pass<strong>in</strong>g through the po<strong>in</strong>t (1,2,3) and perpendicularto the vector n = 〈4,5,6〉.Solution .........Observe that if we multiply out the terms <strong>in</strong> (3.31) and simplify, we obta<strong>in</strong> an equationof the formax+by +cz +d = 0For example, equation <strong>in</strong> Example 3.33 can be rewritten as4x+5y +6z −32 = 0Theorem 3.15 If a, b, c, and d are constants, and a, b, and c are not all zero, then thegraph of the equationax+by +cz +d = 0 (3.32)is a plane that has the vector n = 〈a,b,c〉 as a normal.Equation (3.32) is called the general form of the equation of a plane.Example 3.34 Determ<strong>in</strong>e whether the planeare parallel.Solution .........3x−4y +5z = 0 and −6x+8y −10z −4 = 0Example 3.35 F<strong>in</strong>d an equation of the plane through the po<strong>in</strong>ts P 1 (1,2,2), P 2 (2,−1,4),and P 3 (3,5,−2).Solution .........Example 3.36 Determ<strong>in</strong>e whether the l<strong>in</strong>eis parallel to the plane x−3y +5z = 12.Solution .........x = 3+8t, y = 4+5t, z = −3−tExample 3.37 F<strong>in</strong>d the <strong>in</strong>tersection of the l<strong>in</strong>e and the plane <strong>in</strong> Example 3.36.Solution .........Example 3.38 F<strong>in</strong>d an equation for the plane through the po<strong>in</strong>t (1,4,−5) and parallel tothe plane def<strong>in</strong>ed by 2x−5y +7z = 12.Solution .........
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 54Intersect<strong>in</strong>g PlanesTwo dist<strong>in</strong>ct <strong>in</strong>tersect<strong>in</strong>g plane determ<strong>in</strong>e two positive angles of <strong>in</strong>tersection—an (acute)angle θ that satisfies the condition 0 ≤ θ ≤ π/2 and the supplement of that angle.n 1θn 2θθ180 ◦ −θIf n 1 and n 2 are normals to the planes, then depend<strong>in</strong>g on the directions of n 1 and n 2 ,the angle θ is either the angle between n 1 and n 2 or the angle between n 1 and −n 2 . In bothcase, we have the follow<strong>in</strong>g formula for the acute angle θ between the planes:cosθ = |n 1 ·n 2 |‖n 1 ‖‖n 2 ‖(3.33)Example 3.39 F<strong>in</strong>d the acute angle of <strong>in</strong>tersection between the two planesSolution .........2x−4y +4z = 6 and 6x+2y −3z = 4Example 3.40 F<strong>in</strong>d an equation for the l<strong>in</strong>e L of <strong>in</strong>tersection of the planes <strong>in</strong> Example3.39.Solution .........Distance Problems Involv<strong>in</strong>g PlanesNext we will consider three basic distance problems <strong>in</strong> 3-space:• F<strong>in</strong>d the distance between a po<strong>in</strong>t and a plane.• F<strong>in</strong>d the distance between two parallel planes.• F<strong>in</strong>d the distance between two skew l<strong>in</strong>es.The three problems are related. If we can f<strong>in</strong>d the distance between a po<strong>in</strong>t and a plane,then we can f<strong>in</strong>d the distance between parallel planes by comput<strong>in</strong>g the distance betweenone of the planes and an arbitrary po<strong>in</strong>t P 0 <strong>in</strong> the other plane. Moreover, we can f<strong>in</strong>dthe distance between two skew l<strong>in</strong>es by comput<strong>in</strong>g the distance between parallel planesconta<strong>in</strong><strong>in</strong>g them.
•••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 55P•0Theorem 3.16 The distance D between a po<strong>in</strong>t P 0 (x 0 ,y 0 ,z 0 ) and the plane ax+by+cz+d =0 isD = |ax 0 +by 0 +cz 0 +d|√a2 +b 2 +c 2 (3.34)Example 3.41 F<strong>in</strong>d the distance D between the po<strong>in</strong>t (1,−4,−3) and the planeSolution .........Example 3.42 The planes2x−3y +6z = −1x+2y −2z = 3 and 2x+4y −4z = 7are parallel s<strong>in</strong>ce their normals, 〈1,2,−2〉 and 〈2,4,−4〉, are parallel vectors. F<strong>in</strong>d thedistance between these planes.Solution .........Example 3.43 It was shown <strong>in</strong> Example 3.29 of Section2.5 that the l<strong>in</strong>eare skew. F<strong>in</strong>d the distance between them.Solution .........3.7 Quadric SurfacesQuadric SurfacesL 1 : x = 1+4t, y = 5−4t, z = −1+5tL 2 : x = 2+8s, y = 4−3s, z = 5+sIn the discussion of Formula (1.11) <strong>in</strong> Section 1.2 we noted that a second-degree equationAx 2 +Bxy +Cy 2 +Dx+Ey +F = 0represents a conic section. The analog of this equation <strong>in</strong> an xyz-coord<strong>in</strong>ate system isAx 2 +By 2 +Cz 2 +Dxy +Exz +Fyz +Gx+Hy +Iz +J = 0 (3.35)which is called a second-degree equation <strong>in</strong> x, y, and z. The graphs of such equationsare called quadric surfaces or sometimes quadrics.Six common types of quadric surfaces are ellipsoids, hyperboloids of one sheet,hyperboloids of two sheet, elliptic cones, elliptic paraboloids, and hyperbolicparaboloids.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 56Techniques for Graph<strong>in</strong>g Quadric SurfacesEllipsoids A sketch of an ellipsoidsx 2a + y22 b + z2= 1 (a > 0,b > 0,c > 0) (3.36)2 c2 can be obta<strong>in</strong>ed by first plott<strong>in</strong>g the <strong>in</strong>tersections with the coord<strong>in</strong>ate axes, then sketch<strong>in</strong>gthe elliptical traces <strong>in</strong> the coord<strong>in</strong>ate planes.Notethat thecurve of <strong>in</strong>tersection ofasurface with a plane iscalled the trace of thesurface<strong>in</strong> the plane.Example 3.44 Sketch the graph of the ellipsoidSolution .........x 24 + y216 + z29 = 1Hyperboloids of One Sheet A sketch of a hyperboloid of one sheetx 2a + y22 b − z2= 1 (a > 0,b > 0,c > 0) (3.37)2 c2 can be obta<strong>in</strong>ed by first sketch<strong>in</strong>g the elliptical traces <strong>in</strong> the xy-planes, then the ellipticaltraces <strong>in</strong> the planes z = ±c, and then the hyperbolic curves that jo<strong>in</strong> the endpo<strong>in</strong>ts of theaxes of these ellipses.Example 3.45 Sketch the graph of the hyperboloid of one sheetSolution .........x 2 +y 2 − z24 = 1Hyperboloids of Two Sheet A sketch of the hyperboloid of two sheetsz 2c − x22 a − y2= 1 (a > 0,b > 0,c > 0) (3.38)2 b2 can be obta<strong>in</strong>ed by first plott<strong>in</strong>g the <strong>in</strong>tersections with the z-axis, then sketch<strong>in</strong>g the ellipticaltraces <strong>in</strong> the planes z = ±2c, and then sketch<strong>in</strong>g the hyperbolic traces that connectthe z-axis <strong>in</strong>tersections and the endpo<strong>in</strong>ts of the axes of the ellipses.Example 3.46 Sketch the graph of the hyperboloid of two sheetsz 2 −x 2 − y24 = 1
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 57Solution .........Elliptic Cones A sketch of the elliptic conez 2 = x2a 2 + y2b 2 (a > 0,b > 0) (3.39)can be obta<strong>in</strong>ed by first sketch<strong>in</strong>g the elliptical traces <strong>in</strong> the planes z = ±1 and thensketch<strong>in</strong>g the l<strong>in</strong>ear traces that connect the endpo<strong>in</strong>ts of the axes of the ellipses.Example 3.47 Sketch the graph of the elliptic coneSolution .........z 2 = x 2 + y24Elliptic Paraboloids A sketch of the elliptic paraboloidz = x2a 2 + y2b 2 (a > 0,b > 0) (3.40)canbe obta<strong>in</strong>edby first sketch<strong>in</strong>g the elliptical traces <strong>in</strong> the planes z = 1 and then sketch<strong>in</strong>gthe parabolic traces <strong>in</strong> the vertical coord<strong>in</strong>ate planes to connect the orig<strong>in</strong> to the ends ofthe axes of the ellipses.Example 3.48 Sketch the graph of the elliptic paraboloidSolution .........z = x24 + y29Hyperbolic Paraboloids A sketch of the hyperbolic paraboloidz = y2b 2 − x2a 2 (a > 0,b > 0) (3.41)can be obta<strong>in</strong>ed by first sketch<strong>in</strong>g the two parabolic traces that pass through the orig<strong>in</strong>(one <strong>in</strong> the plane x = 0 and the other <strong>in</strong> the plane y = 0). After the parabolic traces aredraw, sketch the hyperbolic traces <strong>in</strong> the planes z = ±1 and then fill <strong>in</strong> any miss<strong>in</strong>g edges.Example 3.49 Sketch the graph of the hyperbolic paraboloidSolution .........z = y24 − x29
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 583.8 Cyl<strong>in</strong>drical and Spherical Coord<strong>in</strong>atesIn this section we will discuss two new types of coord<strong>in</strong>ate systems <strong>in</strong> 3-space that are oftenmore useful than rectangular coord<strong>in</strong>ate systems for study<strong>in</strong>g surfaces with symmetries.Cyl<strong>in</strong>drical and Spherical Coord<strong>in</strong>ate SystemsThree coord<strong>in</strong>ates are required to establish the location of a po<strong>in</strong>t <strong>in</strong> 3-space. We havealready done this us<strong>in</strong>g rectangular coord<strong>in</strong>ates. However, the follow<strong>in</strong>g Figure shows twoother possibilities: part (a) of the figure shows the rectangular coord<strong>in</strong>ates (x,y,z) ofa po<strong>in</strong>t P, part (b) shows the cyl<strong>in</strong>drical coord<strong>in</strong>ates (r,θ,z) of P, and part (c) showsthe spherical coord<strong>in</strong>ates (ρ,θ,φ) of P.zzzy• P(x,y,z)zyxθr• P(r,θ,z)zyφρθ• P(ρ,θ,φ)yxRectangular coord<strong>in</strong>ates(x,y,z)xCyl<strong>in</strong>drical coord<strong>in</strong>ates(r,θ,z)(r ≥ 0,0 ≤ θ < 2π)xSpherical coord<strong>in</strong>ates(ρ,θ,φ)(ρ ≥ 0,0 ≤ θ < 2π,0 ≤ φ ≤ π)Constant SurfacesIn rectangular coord<strong>in</strong>ates the surfaces represented by equations of the formx = x 0 , y = y 0 , and z = z 0wherex 0 ,y 0 ,andz 0 areconstant, areplanesparalleltotheyz-plane, xz-plane, andxy-plane,respectively.In cyl<strong>in</strong>drical coord<strong>in</strong>ates the surfaces represented by equations of the formwhere r 0 ,θ 0 , and z 0 are constant.r = r 0 , θ = θ 0 , and z = z 0• The surface r = r 0 is a right circular cyl<strong>in</strong>der of radius r 0 centered on the z-axis.• The surface θ = θ 0 is a half-plane attached along the z-axis and mak<strong>in</strong>g an angle θ 0with the positive x-axis.• The surface z = z 0 is a horizontal plane.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 59In spherical coord<strong>in</strong>ates the surfaces represented by equations of the formwhere ρ 0 ,θ 0 , and φ 0 are constant.ρ = ρ 0 , θ = θ 0 , and φ = φ 0• The surface ρ = ρ 0 consists of all po<strong>in</strong>ts whose distance ρ from the orig<strong>in</strong> is ρ 0 .Assum<strong>in</strong>g ρ 0 to be nonnegative, this is a sphere of radius ρ 0 centered at the orig<strong>in</strong>.• As <strong>in</strong> cyl<strong>in</strong>drical coord<strong>in</strong>ates, the surface θ = θ 0 is a half-plane attached along thez-axis, mak<strong>in</strong>g an angle θ 0 with the positive x-axis.• The surface φ = φ 0 consists of all po<strong>in</strong>t from which a l<strong>in</strong>e segment to the orig<strong>in</strong> makesan angle of φ 0 with the positive z-axis. If 0 ≤ φ 0 < π/2, this will be the nappe ofa cone open<strong>in</strong>g up, while if π/2 < φ 0 < π, this will be the nappe of a cone open<strong>in</strong>gdown. (If φ 0 = π/2, then the cone is flat, and the surface is the xy-plane.)Convert<strong>in</strong>g Coord<strong>in</strong>atesJust as we needed to convert between rectangular and polar coord<strong>in</strong>ates <strong>in</strong> 2-space, so wewill need to be able to convert between rectangular, cyl<strong>in</strong>drical, and spherical coord<strong>in</strong>ates<strong>in</strong> 3-space. The follow<strong>in</strong>g Table provides formulas for mak<strong>in</strong>g these conversions.ConversionFormulasCyl<strong>in</strong>drical to rectangular (r,θ,z) → (x,y,z) x = rcosθ,y = rs<strong>in</strong>θ,z = zRectangular to cyl<strong>in</strong>drical (x,y,z) → (r,θ,z) r = √ x 2 +y 2 ,tanθ = y/x,z = zSpherical to cyl<strong>in</strong>drical (ρ,θ,φ) → (r,θ,z) r = ρs<strong>in</strong>φ,θ = θ,z = ρcosφCyl<strong>in</strong>drical to spherical (r,θ,z) → (ρ,θ,φ) ρ = √ r 2 +z 2 ,θ = θ,tanφ = r/zSpherical to rectangular (ρ,θ,φ) → (x,y,z) x = ρs<strong>in</strong>φcosθ,y = ρs<strong>in</strong>φs<strong>in</strong>θ,z = ρcosφRectangular to spherical (x,y,z) → (ρ,θ,φ) ρ = √ x 2 +y 2 +z 2 ,tanθ = y/x,cosφ = z/ √ x 2 +y 2 +z 2Note that r ≥ 0, ρ ≥ 0, 0 ≤ θ < 2π, 0 ≤ φ ≤ π.The diagrams <strong>in</strong> the follow<strong>in</strong>g Figure will help you to understand how the formulas <strong>in</strong>Table are derived.xzθyr•Pz{(x,y,z)(r,θ,z)(r,θ,0)yzφθρrφ•Pz{(ρ,θ,φ)(r,θ,z)yx(a)x(b)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 60Forexample, part (a)<strong>in</strong> the Figureshows that <strong>in</strong>convert<strong>in</strong>g between rectangular coord<strong>in</strong>ates(x,y,z)andcyl<strong>in</strong>dricalcoord<strong>in</strong>ates(r,θ,z),wecan<strong>in</strong>terpret(r,θ)aspolarcoord<strong>in</strong>atesof (x,y). Thus, the polar-to-rectangular and rectangular-to-polar conversion formulas (2.4)and (2.5) of Section 2.2 provide the conversion formulas between rectangular and cyl<strong>in</strong>dricalcoord<strong>in</strong>ates.Part (b) of Figure suggests that the spherical coord<strong>in</strong>ates (ρ,θ,φ) of the po<strong>in</strong>t P can beconverted to cyl<strong>in</strong>drical coord<strong>in</strong>ates (r,θ,z) by the conversion formulasr = ρs<strong>in</strong>φ, θ = θ, z = ρcosφ (3.42)Moreover, s<strong>in</strong>ce the cyl<strong>in</strong>drical coord<strong>in</strong>ates (r,θ,z) of P can be converted to rectangularcoord<strong>in</strong>ates (x,y,z) by the conversion formulasx = rcosθ, y = rs<strong>in</strong>θ, z = z (3.43)we can obta<strong>in</strong> direct conversion formulas from spherical coord<strong>in</strong>ates to rectangular coord<strong>in</strong>atesby substitut<strong>in</strong>g (3.42) <strong>in</strong> (3.43). This yieldsx = ρs<strong>in</strong>φcosθ, y = ρs<strong>in</strong>φs<strong>in</strong>θ, z = ρcosφ (3.44)The other conversion formulas <strong>in</strong> Table are left as exercises.Example 3.50(a) F<strong>in</strong>d the rectangular coord<strong>in</strong>ates of the po<strong>in</strong>t with cyl<strong>in</strong>drical coord<strong>in</strong>ates(r,θ,z) = (4,π/3,−3)(b) F<strong>in</strong>d the rectangular coord<strong>in</strong>ates of the po<strong>in</strong>t with spherical coord<strong>in</strong>atesSolution .........(ρ,θ,φ) = (4,π/3,π/4)Example 3.51 F<strong>in</strong>d the spherical coord<strong>in</strong>ates of the po<strong>in</strong>t that has rectangular coord<strong>in</strong>atesSolution .........(x,y,z) = (4,−4,4 √ 6)Example 3.52 F<strong>in</strong>d equations of the paraboloid z = x 2 + y 2 <strong>in</strong> cyl<strong>in</strong>drical and sphericalcoord<strong>in</strong>ates.Solution .........
<strong>Chapter</strong> 4Vector-Valued Functions4.1 Introduction to Vector-Valued FunctionsParametric Curves <strong>in</strong> 3-SpaceRecall that if f and g are well-behaved functions, then the pair of parametric equationsx = f(t), y = g(t) (4.1)generatesacurve <strong>in</strong>2-spacethatistraced<strong>in</strong>aspecific directionastheparameter t<strong>in</strong>creases.We def<strong>in</strong>e this direction to be the orientation of the curve or the direction of <strong>in</strong>creas<strong>in</strong>gparameter, and we called the curve together with its orientation the graph of the parametricequations or the parametric curve represented by the equations. Analogously, if f, g and hare three well-behaved functions, then the parametric equationsx = f(t), y = g(t), z = h(t) (4.2)generatesacurve <strong>in</strong>3-spacethatistraced<strong>in</strong>aspecificdirectionast<strong>in</strong>creases. As<strong>in</strong>2-space,this direction is called the orientation or direction of <strong>in</strong>creas<strong>in</strong>g parameter, and thecurve together with its orientation is called the graph of the parametric equations or theparametric curve represented by the equations. If no restrictions are state explicitlyor are implied by the equation, then it will be understood that t varies over the <strong>in</strong>terval(−∞,+∞).Example 4.1 Describe the parametric curve represented by the equationsSolution .........x = 1−t, y = 3t, z = 2t.Example 4.2 Describe the parametric curve represented by the equationswhere a and c are positive constants.x = acosθ, y = as<strong>in</strong>θ, z = ct.61
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 62Solution As the parameter t <strong>in</strong>creases, the value of z = ct also <strong>in</strong>creases, so the po<strong>in</strong>t(x,y,z) moves upward. However, as t <strong>in</strong>creases, the po<strong>in</strong>t (x,y,z) also moves <strong>in</strong> a pathdirectly over the circlex = acosθ, y = as<strong>in</strong>θ<strong>in</strong> the xy-plane. The comb<strong>in</strong>ation of these upward and circular motions produces a corkscrew-shaped curve that wraps around a right circular cyl<strong>in</strong>der of radius a centered on thez-axis. This curve is called a circular helix.zxy✠Parametric Equations for Intersections of SurfacesCurve <strong>in</strong> 3-space often arise as <strong>in</strong>tersections of surfaces. One method for f<strong>in</strong>d<strong>in</strong>g parametricequations for the curve of <strong>in</strong>tersection is to choose one of the variables as the parameter anduse the two equations to express the rema<strong>in</strong><strong>in</strong>g two variables <strong>in</strong> terms of that parameter.For example, suppose we want to f<strong>in</strong>d parametric equations of the <strong>in</strong>tersection of thecyl<strong>in</strong>der z = x 3 and y = x 2 . We choose x = t as the parameter and substitute this <strong>in</strong>to theequations z = x 3 and y = x 2 , then we obta<strong>in</strong> the parametric equationsThis curve is called a twisted cubic.x = t, y = t 2 , z = t 3 (4.3)
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 63Vector-Valued FunctionsThe twisted cubic def<strong>in</strong>ed by the equations <strong>in</strong> (4.3) is the set of po<strong>in</strong>ts of the form (t,t 2 ,t 3 )for real values of t. If we view each of these po<strong>in</strong>ts as a term<strong>in</strong>al po<strong>in</strong>t for a vector r whose<strong>in</strong>itial po<strong>in</strong>t is at the orig<strong>in</strong>,r = 〈x,y,z〉 = 〈t,t 2 ,t 3 〉 = ti+t 2 j+t 2 kthen we obta<strong>in</strong> r as a function of the parameter t, that is, r = r(t). S<strong>in</strong>ce this functionproduces a vector, we say that r = r(t) def<strong>in</strong>es r as a vector-valued function of a realvariable, or more simply, a vector-valued function.If r(t) is a vector-valued function <strong>in</strong> 2-space, then for each allowable value of t the vectorr = r(t) can be represented <strong>in</strong> terms of components asr = r(t) = 〈x(t),y(t)〉 = x(t)i+y(t)jThe functions x(t) and y(t) are called the component functions or the components ofr(t). Similarly, the component functions of a vector-valued function<strong>in</strong> 3-space are x(t), y(t) and z(t).r = r(t) = 〈x(t),y(t),z(t)〉 = x(t)i+y(t)j+z(t)kExample 4.3 The component functions ofarer(t) = 〈t,t 2 ,t 3 〉 = ti+t 2 j+t 3 kx(t) = t, y(t) = t 2 , z(t) = t 3The doma<strong>in</strong> of a vector-valued function r(t) is the set of allowable values for t. If r(t)is def<strong>in</strong>ed <strong>in</strong> terms of component functions and the doma<strong>in</strong> is not specified explicitly, thenthe doma<strong>in</strong> is the <strong>in</strong>tersection of the natural doma<strong>in</strong>s of the component functions; this iscalled the natural doma<strong>in</strong> of r(t).Example 4.4 F<strong>in</strong>d the natural doma<strong>in</strong> ofSolution .........r(t) = 〈ln|t−1|,e t , √ t〉 = (ln|t−1|)i+e t j+ √ tkGraphs of Vector-Valued FunctionsIf r(t) is a vector-valued function <strong>in</strong> 2-space or 3-space, then we def<strong>in</strong>e the graph of r(t) tobe the parametric curve described by the component functions for r(t).For example, ifr(t) = 〈1−t,3t,2t〉 = (1−t)i+3tj+2tk (4.4)then the graph of r = r(t) is the graph of the parametric equationsx = 1−t, y = 3t, z = 2tThus, the graph of (4.4) is the l<strong>in</strong>e <strong>in</strong> Example 4.1.✠
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 64Example 4.5 Describe the graph of the vector-valued functionSolution .........r(t) = 〈cost,s<strong>in</strong>t,t〉 = costi+s<strong>in</strong>tj+tkIf a parametric curve is viewed as the graph of a vector-valued function, then we canalso imag<strong>in</strong>e the graph to be traced by the tip of the mov<strong>in</strong>g vector. For example, if thecurve C <strong>in</strong> 3-space is the graph ofr(t) = x(t)i+y(t)j+z(t)kand if we position r(t) so its <strong>in</strong>itial po<strong>in</strong>t is at the orig<strong>in</strong>, then its term<strong>in</strong>al po<strong>in</strong>t will fallon the curve C.z(x(t),y(t),z(t))r(t)CyxThus, when r(t) is positioned with its <strong>in</strong>itial po<strong>in</strong>t at the orig<strong>in</strong>, its term<strong>in</strong>al po<strong>in</strong>t will traceout the curve C as the parameter t varies, <strong>in</strong> which case we call r(t) the radius vector orthe position vector for C.Example 4.6 Sketch the graph and a radius vector of(a) r(t) = costi+s<strong>in</strong>tj, 0 ≤ t ≤ 2π(b) r(t) = costi+s<strong>in</strong>tj+2k, 0 ≤ t ≤ 2πSolution .........Vector Form of a L<strong>in</strong>e SegmentRecall that if r 0 is a vector <strong>in</strong> 2-space or 3-space with its <strong>in</strong>itial po<strong>in</strong>ts at the orig<strong>in</strong>, thenthe l<strong>in</strong>e that passes through the term<strong>in</strong>al po<strong>in</strong>t of r 0 and is parallel to the vector v can beexpressed <strong>in</strong> vector form asr = r 0 +tvIn particular, if r 0 and r 1 are vectors <strong>in</strong> 2-space or 3-space with their <strong>in</strong>itial po<strong>in</strong>ts atthe orig<strong>in</strong>, then the l<strong>in</strong>e that passes through the term<strong>in</strong>al po<strong>in</strong>ts of these vectors can beexpressed <strong>in</strong> vector form asr = r 0 +t(r 1 −r 0 ) or r = (1−t)r 0 +tr 1 (4.5)
••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 65r 0t(r 1 −r 0 )rOr 1r = (1−t)r 0 +tr 1It is common to call (4.5) the two-po<strong>in</strong>t vector form of a l<strong>in</strong>e. It is understood<strong>in</strong> (4.5) that t varies from −∞ to +∞. However, if we restrict t to vary over the <strong>in</strong>terval0 ≤ t ≤ 1, then r will vary from r 0 to r 1 . Thus, the equationr = (1−t)r 0 +tr 1 (0 ≤ t ≤ 1) (4.6)represents the l<strong>in</strong>e segment <strong>in</strong> 2-space or 3-space that is traced from r 0 to r 1 .4.2 Calculus of Vector-Valued FunctionsIn this section we will def<strong>in</strong>e limits, derivative, and <strong>in</strong>tegral of vector-valued functions.Limits and Cont<strong>in</strong>uityOur first goal <strong>in</strong> this section is to develop a notion of what it means for a vector-valuedfunction r(t) <strong>in</strong> 2-space or 3-space to approach a limit<strong>in</strong>g vector ̷L ar t approaches a numbera. That is, we want to def<strong>in</strong>elimr(t) = ̷L (4.7)t→aDef<strong>in</strong>ition 4.1 Let r(t) be a vector-valued function that is def<strong>in</strong>ed for all t <strong>in</strong> some open<strong>in</strong>terval conta<strong>in</strong><strong>in</strong>g the number a, except that r(t) need not be def<strong>in</strong>ed at a. We will writelimr(t) = ̷Lt→aif and only ifTheorem 4.1lim‖r(t)− ̷L‖ = 0t→a(a) If r(t) = 〈x(t),y(t)〉 = x(t)i+y(t)j, thenlimr(t) =t→a〈limt→ax(t),limt→ay(t)〉= limt→ax(t)i+limt→ay(t)jprovided the limits of the component functions exist. Conversely, the limits of thecomponent functions exist provided r(t) approaches a limit<strong>in</strong>g vector as t approachesa.
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 66(b) If r(t) = 〈x(t),y(t),z(t)〉 = x(t)i+y(t)j+z(t)k, then〈〉limr(t) = limx(t),limy(t),limz(t)t→a t→a t→a t→a= limt→ax(t)i+limt→ay(t)j+limt→az(t)kprovided the limits of the component functions exist. Conversely, the limits of thecomponent functions exist provided r(t) approaches a limit<strong>in</strong>g vector as t approachesa.Example 4.7 F<strong>in</strong>d limt→0((t 2 +1)i+5costj+s<strong>in</strong>tk ) .Solution .........Example 4.8 F<strong>in</strong>d limt→0〈t 2 ,e t ,−2cosπt〉.Solution .........Motivated by the def<strong>in</strong>ition of cont<strong>in</strong>uity for real-valued functions, we def<strong>in</strong>e a vectorvaluedfunction r(t) to be cont<strong>in</strong>uous at t = a iflimr(t) = r(a) (4.8)t→aThat is, r(a) is def<strong>in</strong>ed, the limit of r(t) as t → a exists, and the two are equal. As <strong>in</strong> thecase for real-valued functions, we say that r(t) is cont<strong>in</strong>uous on an <strong>in</strong>terval I if it iscont<strong>in</strong>uous at each po<strong>in</strong>t of I. It follows from Theorem 4.1 that a vector-valued function iscont<strong>in</strong>uous at t = a if and only if its component functions are cont<strong>in</strong>uous at t = a.DerivativesThe derivative of a vector-valued function is def<strong>in</strong>ed by a limit similar to that for thederivative of a real-values function.Def<strong>in</strong>ition 4.2 If r(t) is a vector-valued function, we def<strong>in</strong>e the derivative of r withrespect to t to be the vector-valued function r ′ given byr ′ (t) = limh→0r(t+h)−r(t)h(4.9)The doma<strong>in</strong> of r consists of all values of t <strong>in</strong> the doma<strong>in</strong> of r(t) for which the limit exists.The function r(t) is differentiable at t if the limit <strong>in</strong> (4.9) exists. All of the standardnotations for derivatives cont<strong>in</strong>ue to apply. For example, the derivative of r(t) can beexpressed asddt [r(t)], drdt , r′ (t), or r ′
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 67Geometric Interpretation of the Derivative.Suppose that C is the graph of a vector-valued function r(t) <strong>in</strong> 2-space or 3-space and thatr ′ (t) exists and is nonzero for a given value of t. If the vector r ′ (t) is positioned with its<strong>in</strong>itial po<strong>in</strong>t as the term<strong>in</strong>al po<strong>in</strong>t of the radius vector r(t), then r ′ (t) is tangent to C andpo<strong>in</strong>ts <strong>in</strong> the direction of <strong>in</strong>creas<strong>in</strong>g parameter.yr ′ (t)r(t)CxTheorem 4.2 If r(t) is a vector-valued function, then r is differentiable at t if and only ifeach of its component functions is differentiable at t, <strong>in</strong> which case the component functionsof r ′ (t) are the derivatives of the correspond<strong>in</strong>g component functions of r(t).Example 4.9 F<strong>in</strong>d the derivative of r(t) = s<strong>in</strong>(t 2 )i+e cost j+tlntk.Solution .........Derivative RulesMany of the rules for differentiat<strong>in</strong>g real-valued functions have analogs <strong>in</strong> the context ofdifferentiat<strong>in</strong>g vector-valued functions. We state some of these <strong>in</strong> the follow<strong>in</strong>g theorem.Theorem 4.3 (Rules of Differentiation). Let r(t), r 1 (t), and r 2 (t) be vector-valuedfunctions that are all <strong>in</strong> 2-space or all <strong>in</strong> 3-space, and let f(t) be a real-valued function, k ascalar, and c a constant vector (that is, a vector whose value does not depend on t). Thenthe follow<strong>in</strong>g rules of differentiation hold:(a)(b)(c)(d)(c)ddt [c] = 0ddt [kr(t)] = k d dt [r(t)]ddt [r 1(t)+r 2 (t)] = d dt [r 1(t)]+ d dt [r 2(t)]ddt [r 1(t)−r 2 (t)] = d dt [r 1(t)]− d dt [r 2(t)]ddt [f(t)r(t)] = f(t) d dt [r(t)]+r(t) d dt [f(t)]
•MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 68Tangent L<strong>in</strong>es to Graphs of Vector-Valued FunctionsDef<strong>in</strong>ition 4.3 Let P be a po<strong>in</strong>t on the graph of a vector-valued function r(t), and let r(t 0 )be the radius vector from the orig<strong>in</strong> to P.yr ′ (t 0 )r(t 0 )PTangent l<strong>in</strong>exIf r ′ (t 0 ) exists and r ′ (t 0 ) ≠ 0, then we call r ′ (t 0 ) a tangent vector to the graph of r(t) atr(t 0 ), and we call the l<strong>in</strong>e through P that is parallel to the tangent vector the tangent l<strong>in</strong>eto the graph of r(t) at r(t 0 ).Let r 0 = r(t 0 ) and v 0 = r ′ (t 0 ). Then the tangent l<strong>in</strong>e to the graph of r(t) at r 0 is givenby the vector equationr = r 0 +tv 0 (4.10)Example 4.10 F<strong>in</strong>d parametric equations of the tangent l<strong>in</strong>e to the circular helixx = cost, y = s<strong>in</strong>t, z = twhere t = t 0 , and use that result to f<strong>in</strong>d parametric equations for the tangent l<strong>in</strong>e at thepo<strong>in</strong>t where t = π.Solution .........Example 4.11 Letandr 1 (t) = (tan −1 t)i+(s<strong>in</strong>t)j+t 2 kr 2 (t) = (t 2 −t)i+(2t−2)j+(lnt)kThe graphs of r 1 (t) and r 2 (t) <strong>in</strong>tersect at the orig<strong>in</strong>. F<strong>in</strong>d the degree measure of the acuteangle between the tangent l<strong>in</strong>es to the graphs of r 1 (t) and r 2 (t) at the orig<strong>in</strong>.Solution .........
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 69Derivatives of Dot and Cross ProductsThe follow<strong>in</strong>g rules provide a method for differentiat<strong>in</strong>g dot products <strong>in</strong> 2-space and 3-spaceand cross product <strong>in</strong> 3-space.ddt [r 1(t)·r 2 (t)] = r 1 (t)· dr 2dt + dr 1dt ·r 2(t) (4.11)ddt [r 1(t)×r 2 (t)] = r 1 (t)× dr 2dt + dr 1dt ×r 2(t) (4.12)Theorem 4.4 If r(t) is a differentiable vector-valued function <strong>in</strong> 2-space or 3-space and‖r(t)‖ is constant for all t, thenr(t)·r ′ (t) = 0 (4.13)that is, r(t) and r ′ (t) are orthogonal vectors for all t.Def<strong>in</strong>ite Integrals of Vector-Valued FunctionsIf r(t) is a vector-valued function that is cont<strong>in</strong>uous on the <strong>in</strong>terval a ≤ t ≤ b, then wedef<strong>in</strong>e the def<strong>in</strong>ite <strong>in</strong>tegral of r(t) over this <strong>in</strong>terval as a limit of Riemann sums, that is,In general, we have∫ ba∫ ba(∫ br(t)dt =∫ bar(t)dt =(∫ br(t)dt =aalimmax △t k →0n∑r(t ∗ k)△t k (4.14)k=1) (∫ b)x(t)dt i+ y(t)dt j 2-space (4.15)a) (∫ b) (∫ b)x(t)dt i+ y(t)dt j+ z(t)dt k 3-space (4.16)aaExample 4.12 Let r(t) = t 2 i+e t j−(2cosπt)k. EvaluateSolution .........∫ 10r(t)dt.Rules of IntegrationAs with differentiat<strong>in</strong>g, many of the rules for <strong>in</strong>tegrat<strong>in</strong>g real-values functions have analogsfor vector-values functions.Theorem 4.5 (Rulesof Integration). Letr(t), r 1 (t), and r 2 (t) be vector-valued functions<strong>in</strong> 2-space or 3-space that are cont<strong>in</strong>uous on the <strong>in</strong>terval a ≤ t ≤ b, and let k be a scalar.Then the follow<strong>in</strong>g rules of <strong>in</strong>tegration hold:
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 70(a)(b)(c)∫ ba∫ ba∫ ba∫ bkr(t)dt = k r(t)dta[r 1 (t)+r 2 (t)]dt =[r 1 (t)−r 2 (t)]dt =∫ ba∫ bar 1 (t)dt+r 1 (t)dt−∫ ba∫ bar 2 (t)dtr 2 (t)dtAntiderivatives of Vector-Valued FunctionsAn antiderivative for a vector-valued function r(t) is a vector-valued function R(t) suchthatR ′ (t) = r(t) (4.17)We express Equation(4.17) us<strong>in</strong>g <strong>in</strong>tegral notation as∫r(t)dt = R(t)+C (4.18)where C represents an arbitrary constant vector. Note that the vector R(t) + C is alsocalled the <strong>in</strong>def<strong>in</strong>ite <strong>in</strong>tegral of r(t).S<strong>in</strong>ce differentiation of vector-valued functions can be performed componentwise, it followsthat antidifferentiation can be done this way as well.∫Example 4.13 Evaluate the <strong>in</strong>def<strong>in</strong>ite <strong>in</strong>tegral (2ti+3t 2 j+s<strong>in</strong>2tk)dt.Solution .........Mostofthefamiliar<strong>in</strong>tegrationpropertieshavevector counterparts. Forexample, vectordifferentiation and <strong>in</strong>tegration are <strong>in</strong>verse operations <strong>in</strong> the sense that[∫ddt]r(t)dt = r(t) and∫r ′ (t)dt = r(t)+C (4.19)Moreover, if R(t) is an antiderivative of r(t) on an <strong>in</strong>terval conta<strong>in</strong><strong>in</strong>g t = a and t = b, thenwe have the follow<strong>in</strong>g vector form of the Fundamental Theorem of Calculus:∫ ba] b ∫r(t)dt = R(t) =a] br(t)dt = R(b)−R(a) (4.20)aExample 4.14 Evaluate the def<strong>in</strong>ite <strong>in</strong>tegralSolution .........∫ 10(s<strong>in</strong>πti+(6t 2 +4t)j ) dt.Example 4.15 F<strong>in</strong>d r(t) given that r ′ (t) = 〈3,2t〉 and r(1) = 〈2,5〉.Solution .........
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 714.3 Change of Parameter; Arc LengthWe observed <strong>in</strong> earlier sections that a curve <strong>in</strong> 2-space or 3-space can be represented parametrically<strong>in</strong> more than one way. Sometimes it will be desirable to change the parameter fora parametric curve to a different parameter that is better suited for the problem at hand.Smooth ParametrizationsA curve represented by r(t) is smoothly parametrized by r(t), that r(t) is a smoothfunction of t if r ′ (t) is cont<strong>in</strong>uous and r ′ (t) ≠ 0 for any allowable value of t. Geometrically,this means that the a smooth parametrized curve can have no abrupt changes <strong>in</strong> directionas the parameter <strong>in</strong>creases.Example 4.16 Determ<strong>in</strong>e whether the follow<strong>in</strong>g vector-valued functions are smooth.(a) r(t) = acosti+as<strong>in</strong>tj+ctk (a > 0,c > 0)(b) r(t) = t 2 i+t 3 jSolution .........Arc Length from the Vector Viewpo<strong>in</strong>tRecall that the arc length L of a parametric curveis given by the formulax = x(t), y = y(t) (a ≤ t ≤ b) (4.21)L =∫ ba√ (dx ) 2+dtAnalogously, the arc length L of a parametric curve<strong>in</strong> 3-space is given by the formula( ) 2 dydt (4.22)dtx = x(t), y = y(t), z = z(t) (a ≤ t ≤ b) (4.23)L =∫ ba√ (dx ) 2+dt( ) 2 dy+dt( ) 2 dzdt (4.24)dtFormulas (4.22) and (4.24) have vector forms that we can obta<strong>in</strong> by lett<strong>in</strong>gr(t) = x(t)i+y(t)j or r(t) = x(t)i+y(t)j+z(t)kIt follows thatdrdt = dx dyi+dt dt j or drdt = dx dy dzi+ j+dt dt dt k
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 72and hence√ (dx ) dr2 ∥dt∥ = +dt( ) 2 dyordt√ (dx ) dr2 ∥dt∥ = +dt( ) 2 dy+dt( ) 2 dzdtSubstitut<strong>in</strong>g these expressions <strong>in</strong> (4.22) and (4.24) leads us to the follow<strong>in</strong>g theorem.Theorem 4.6 If C is the graph <strong>in</strong> 2-space or 3-space of a smooth vector-valued functionr(t), then its arc length L from t = a to t = b isL =Example 4.17 F<strong>in</strong>d the arc length of the vector-valued functionfrom t = 0 to t = π.Solution .........∫ badr∥dt∥ dt (4.25)r(t) = costi+s<strong>in</strong>tj+tkExample 4.18 F<strong>in</strong>d the arc length of the vector-valued functionSolution .........Arc Length as a Parameterr(t) = 〈2t,lnt,t 2 〉 for 1 ≤ t ≤ e.For many purpose the best parameter to use for represent<strong>in</strong>g a curve <strong>in</strong> 2-space or 3-spaceparametricallyisthelengthofarcmeasured alongthecurve fromsomefixed reference po<strong>in</strong>t.This can be done as follows:Us<strong>in</strong>g Arc Length as a ParameterStep 1. Select an arbitrary po<strong>in</strong>t on the curve C to serve as a reference po<strong>in</strong>t.Step 2. Start<strong>in</strong>g from the reference po<strong>in</strong>t, choose one direction along the curve to be thepositive direction and the other to be the negative direction.Step 3. If P is a po<strong>in</strong>t on the curve, let s be the signed arc length along C from thereference po<strong>in</strong>t to P, where s is positive if P is <strong>in</strong> the positive direction from thereference po<strong>in</strong>t and s is negative if P is <strong>in</strong> the negative direction.
•••••••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 73s = 3s = 2s = 1Reference po<strong>in</strong>ts = −1s = −2s = −3CLet us now treat s as a variable. As the value of s changes, the correspond<strong>in</strong>g po<strong>in</strong>tP moves along C and the coord<strong>in</strong>ate of P become functions of s. Thus, <strong>in</strong> 2-space thecoord<strong>in</strong>ate of P are (x(s),y(s)), and <strong>in</strong> 3-space they are (x(s),y(s),z(s)). Therefore <strong>in</strong>2-space or 3-space the curve C is given by the parametric equationsx = x(s), y = y(s), or x = x(s), y = y(s), z = z(s)A parametric representation of a curve with arc length as the parameter is called an arclength parametrization of the curve.Example 4.19 F<strong>in</strong>d the arc length parametrization of the circle x 2 + y 2 = a 2 with counterclockwiseorientation and (a,0) as the reference po<strong>in</strong>t.Solution .........Change of ParameterA change of parameter <strong>in</strong> a vector-valued function r(t) is a substitution t = g(τ) thatproduce a new vector-valued function r(g(τ)) have the same graph as r(t), but possiblytraced differently as the parameter τ <strong>in</strong>creases.Example 4.20 F<strong>in</strong>d a change of parameter t = g(τ) for the circlesuch thatr(t) = costi+s<strong>in</strong>tj (0 ≤ t ≤ 2π)(a) the circle is traced counterclockwise as τ <strong>in</strong>creases over the <strong>in</strong>terval [0,1];(b) the circle is traced clockwise as τ <strong>in</strong>creases over the <strong>in</strong>terval [0,1].Solution .........Theorem 4.7 (Cha<strong>in</strong> Rule) Let r(t) be a vector-valued function <strong>in</strong> 2-space or 3-spacethat is differentiable with respect to t. If t = g(τ) is a change of parameter <strong>in</strong> which g isdifferentiable with respect to τ, then r((g(τ)) is differentiable with respect to τ anddrdτ = dr dtdt dτ(4.26)
••MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 74A change of parameter t = g(τ) <strong>in</strong> which r(g(τ)) is smooth is called a smooth changeof parameter. Smooth change of parameter fall <strong>in</strong>to two categories—those for whichdt/dτ > 0forallτ (calledpositive changes of parameter)andthoseforwhichdt/dτ < 0for all τ (called negative changes of parameter). A positive changes of parameterpreserves theorientationofaparametriccurve, andanegativechangesofparameterreversesit.F<strong>in</strong>d<strong>in</strong>g Arc Length ParametrizationsTheorem 4.8 Let C be the graph of a smooth vector-valued function r(t) <strong>in</strong> 2-space or 3-space, and let r 0 (t) be any po<strong>in</strong>t on C. Then the follow<strong>in</strong>g formula def<strong>in</strong>es a positive changeof parameter from t to s, where s is an arc length parameter hav<strong>in</strong>g r 0 (t) as its referencepo<strong>in</strong>t:∫ t∥ ∥∥∥ drs =t 0du∥ du (4.27)yr(t 0 )sr(t)CxWhen needed, Formula (4.27) can be expressed <strong>in</strong> component form ass =s =∫ t√ (dx ) 2+t 0du∫ t√ (dx ) 2+t 0du( ) 2 dy+du( ) 2 dydu 2-space (4.28)du( ) 2 dzdu 3-space (4.29)duExample 4.21 F<strong>in</strong>d the arc length parametrization of the circular helixr = costi+s<strong>in</strong>tj+tkthat has reference po<strong>in</strong>t r(0) = (1,0,0) and has the same orientation as the given helix.Solution .........Example 4.22 A bug walks along the trunk of a tree follow<strong>in</strong>g a path modeled by thecircular helix <strong>in</strong> Example 4.21. The bug starts at the reference po<strong>in</strong>t (1,0,0) and walks upthe helix for a distance of 10 units. What are the bug’s f<strong>in</strong>al coord<strong>in</strong>ates?
MA112 Section 750001: Prepared by Dr.Archara Pacheenburawana 75Solution .........Example 4.23 F<strong>in</strong>d the arc length parametrization of the l<strong>in</strong>ex = 2t+1, y = 3t−2that has the same orientation as the given l<strong>in</strong>e and uses (1,−2) as the reference po<strong>in</strong>t.Solution .........Properties of Arc Length ParametrizationsTheorem 4.9(a) If C is the graph of a smooth vector-valued function r(t) <strong>in</strong> 2-space or 3-space, wheret is a general parameter, and if s is the arc length parameter for C def<strong>in</strong>ed by Formula(4.27), then for every value of t the tangent vector has lengthdr∥dt∥ = ds(4.30)dt(b) If C is the graph of a smooth vector-valued function r(t) <strong>in</strong> 2-space or 3-space, wheres is an arc length parameter, then for every value of s the tangent vector to C haslengthdr∥ds∥ = 1 (4.31)(c) If C is the graph of a smooth vector-valued function r(t) <strong>in</strong> 2-space or 3-space, andif ‖dr/dt‖ = 1 for every value of t, then for any value of t 0 <strong>in</strong> the doma<strong>in</strong> of r, theparameter s = t−t 0 is an arc length parameter that has its reference po<strong>in</strong>t at the po<strong>in</strong>ton C where t = t 0 .The component forms of Formulas (4.30) and (4.31) are as follow:∥ √ (dx )ds ∥∥∥dt = dr2 dt∥ = +dt∥ √ (dx )ds ∥∥∥dt = dr2 dt∥ = +dt√ (dx ) dr2 ∥ds∥ = +ds√ (dx ) dr2 ∥ds∥ = +ds( ) 2 dy+ds( ) 2 dy+dt( ) 2 dy2-space (4.32)dt( ) 2 dz3-space (4.33)dt( ) 2 dy= 1 2-space (4.34)ds( ) 2 dz= 1 3-space (4.35)ds













