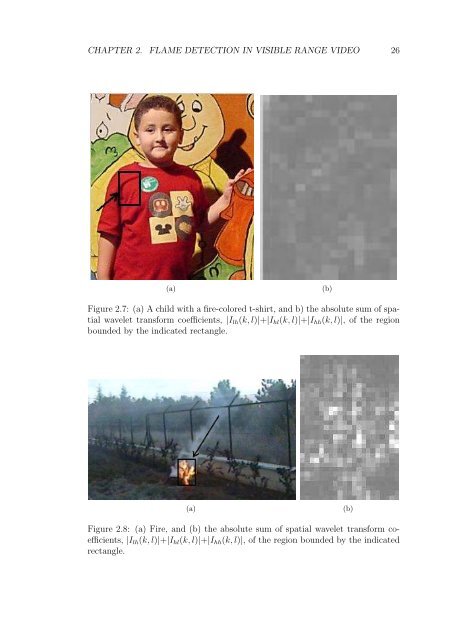
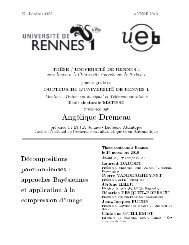
CHAPTER 2. FLAME DETECTION IN VISIBLE RANGE VIDEO 25the flame and non-flame pixel models. The model yielding higher probability isdetermined as the result of the analysis for each of the candidate pixel. A pixelis called as a flame or a non-flame pixel according to the result of this analysis.A fire mask composing of flame pixels is formed as the output of the method.The probability of a Markov model producing a given sequence of wavelet coefficientsis determined by the sequence of state transition probabilities. Therefore,the flame decision process is insensitive to the choice of thresholds T 1 and T 2 ,which basically determine if a given wavelet coefficient is close to zero or not.Still, thresholds can be determined using a k-means type algorithm, as well.2.2.4 Spatial Wavelet AnalysisThe fourth step of our fire detection algorithm is the spatial wavelet analysis ofmoving regions containing <strong>Fire</strong> mask pixels to capture color variations in pixelvalues. In an ordinary fire-colored object there will be little spatial variations inthe moving region as shown in Fig. 2.7 (a). On the other hand, there will besignificant spatial variations in a fire region as shown in Fig. 2.8 (a). The spatialwavelet analysis of a rectangular frame containing the pixels of fire-colored movingregions is performed. The images in Figs. 2.7 (b) and 2.8 (b) are obtained after asingle stage two-dimensional wavelet transform that is implemented in a separablemanner using the same filters explained in Subsection 2.2.3. Absolute values oflow-high, high-low and high-high wavelet subimages are added to obtain theseimages. A decision parameter v 4 is defined for this step, according to the energyof the wavelet subimages:v 4 =1M × N∑|I lh (k, l)| + |I hl (k, l)| + |I hh (k, l)|, (2.12)k,lwhere I lh (k, l) is the low-high subimage, I hl (k, l) is the high-low subimage, andI hh (k, l) is the high-high subimage of the wavelet transform, respectively, andM × N is the number of pixels in the fire-colored moving region. If the decisionparameter of the fourth step of the algorithm, v 4 , exceeds a threshold, then it islikely that this moving and fire-colored region under investigation is a fire region.
CHAPTER 2. FLAME DETECTION IN VISIBLE RANGE VIDEO 26(a)(b)Figure 2.7: (a) A child with a fire-colored t-shirt, and b) the absolute sum of spatialwavelet transform coefficients, |I lh (k, l)|+|I hl (k, l)|+|I hh (k, l)|, of the regionbounded by the indicated rectangle.(a)(b)Figure 2.8: (a) <strong>Fire</strong>, and (b) the absolute sum of spatial wavelet transform coefficients,|I lh (k, l)|+|I hl (k, l)|+|I hh (k, l)|, of the region bounded by the indicatedrectangle.