Planck Pre-Launch Status Papers - APC - Université Paris Diderot ...
Planck Pre-Launch Status Papers - APC - Université Paris Diderot ...
Planck Pre-Launch Status Papers - APC - Université Paris Diderot ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
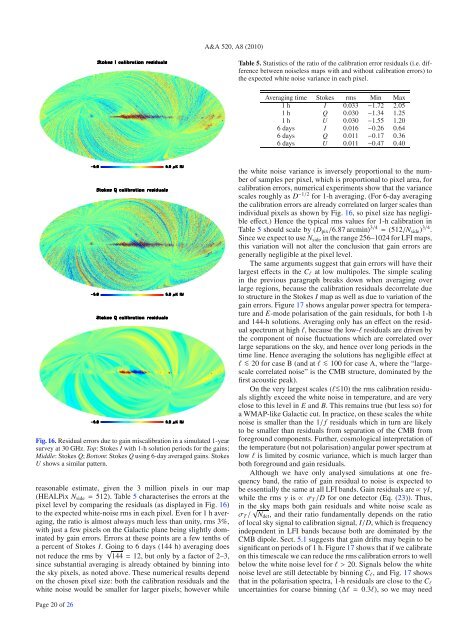
A&A 520, A8 (2010)Table 5. Statistics of the ratio of the calibration error residuals (i.e. differencebetween noiseless maps with and without calibration errors) tothe expected white noise variance in each pixel.Averaging time Stokes rms Min Max1h I 0.033 −1.72 2.051h Q 0.030 −1.34 1.251h U 0.030 −1.55 1.206days I 0.016 −0.26 0.646days Q 0.011 −0.17 0.366days U 0.011 −0.47 0.40Fig. 16. Residual errors due to gain miscalibration in a simulated 1-yearsurvey at 30 GHz. Top:StokesI with 1-h solution periods for the gains;Middle:StokesQ; Bottom:StokesQ using 6-day averaged gains. StokesU shows a similar pattern.reasonable estimate, given the 3 million pixels in our map(HEALPix N side = 512). Table 5 characterises the errors at thepixel level by comparing the residuals (as displayed in Fig. 16)to the expected white-noise rms in each pixel. Even for 1 h averaging,the ratio is almost always much less than unity, rms 3%,with just a few pixels on the Galactic plane being slightly dominatedby gain errors. Errors at these points are a few tenths ofapercentofStokesI. Goingto6days(144h)averagingdoesnot reduce the rms by √ 144 = 12, but only by a factor of 2–3,since substantial averaging is already obtained by binning intothe sky pixels, as noted above. These numerical results dependon the chosen pixel size: both the calibration residuals and thewhite noise would be smaller for larger pixels; however whilethe white noise variance is inversely proportional to the numberof samples per pixel, which is proportional to pixel area, forcalibration errors, numerical experiments show that the variancescales roughly as D −1/2 for 1-h averaging. (For 6-day averagingthe calibration errors are already correlated on larger scales thanindividual pixels as shown by Fig. 16, sopixelsizehasnegligibleeffect.) Hence the typical rms values for 1-h calibration inTable 5 should scale by (D pix /6.87 arcmin) 3/4 = (512/N side ) 3/4 .Since we expect to use N side in the range 256–1024 for LFI maps,this variation will not alter the conclusion that gain errors aregenerally negligible at the pixel level.The same arguments suggest that gain errors will have theirlargest effects in the C l at low multipoles. The simple scalingin the previous paragraph breaks down when averaging overlarge regions, because the calibration residuals decorrelate dueto structure in the Stokes I map as well as due to variation of thegain errors. Figure 17 shows angular power spectra for temperatureand E-mode polarisation of the gain residuals, for both 1-hand 144-h solutions. Averaging only has an effect on the residualspectrum at high l,becausethelow-l residuals are driven bythe component of noise fluctuations which are correlated overlarge separations on the sky, and hence over long periods in thetime line. Hence averaging the solutions has negligible effect atl < ∼ 20 for case B (and at l < ∼ 100 for case A, where the “largescalecorrelated noise” is the CMB structure, dominated by thefirst acoustic peak).On the very largest scales (l< ∼ 10) the rms calibration residualsslightly exceed the white noise in temperature, and are veryclose to this level in E and B. Thisremainstrue(butlessso)foraWMAP-likeGalacticcut.Inpractice, on these scales the whitenoise is smaller than the 1/ f residuals which in turn are likelyto be smaller than residuals from separation of the CMB fromforeground components. Further, cosmological interpretation ofthe temperature (but not polarisation) angular power spectrum atlow l is limited by cosmic variance, which is much larger thanboth foreground and gain residuals.Although we have only analysed simulations at one frequencyband, the ratio of gain residual to noise is expected tobe essentially the same at all LFI bands. Gain residuals are ∝ γI,while the rms γ is ∝ σ T /D for one detector (Eq. (23)). Thus,in the sky maps both gain residuals and white noise scale asσ T / √ N det ,andtheirratiofundamentallydependsontheratioof local sky signal to calibration signal, I/D,whichisfrequencyindependent in LFI bands because both are dominated by theCMB dipole. Sect. 5.1 suggests that gain drifts may begin to besignificant on periods of 1 h. Figure 17 shows that if we calibrateon this timescale we can reduce the rms calibration errors to wellbelow the white noise level for l>20. Signals below the whitenoise level are still detectable by binning C l ,andFig.17 showsthat in the polarisation spectra, 1-h residuals are close to the C luncertainties for coarse binning (∆l = 0.3l), so we may needPage 20 of 26