Planck Pre-Launch Status Papers - APC - Université Paris Diderot ...
Planck Pre-Launch Status Papers - APC - Université Paris Diderot ... Planck Pre-Launch Status Papers - APC - Université Paris Diderot ...
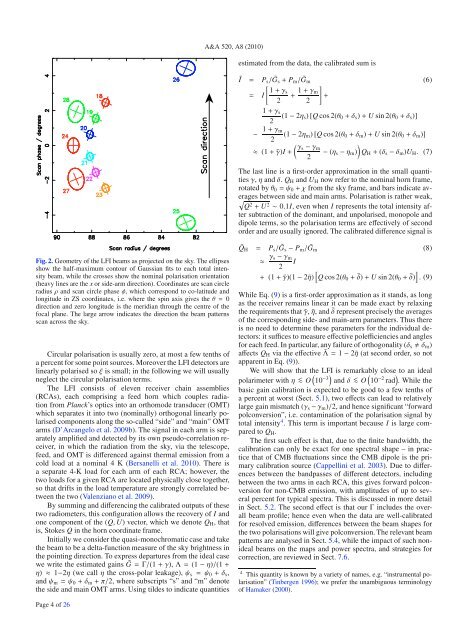
A&A 520, A8 (2010)estimated from the data, the calibrated sum isĨ = P s / ˜G s + P m / ˜G m (6)[ 1 + γs= I + 1 + γ ]m+2 21 + γ s(1 − 2η s )[Q cos 2(θ 0 + δ s ) + U sin 2(θ 0 + δ s )]2− 1 + γ m(1 − 2η m )[Q cos 2(θ 0 + δ m ) + U sin 2(θ 0 + δ m )]2( γs − γ)m≈ (1 + ¯γ)I + − (η s − η m ) Q H + (δ s − δ m )U H . (7)2The last line is a first-order approximation in the small quantitiesγ, η and δ. Q H and U H now refer to the nominal horn frame,rotated by θ 0 = ψ 0 + χ from the sky frame, and bars indicate averagesbetween side and main arms. Polarisation is rather weak,√Q2 + U 2 ∼ 0.1I, evenwhenI represents the total intensity aftersubtraction of the dominant, and unpolarised, monopole anddipole terms, so the polarisation terms are effectively of secondorder and are usually ignored. The calibrated difference signal isFig. 2. Geometry of the LFI beams as projected on the sky. The ellipsesshow the half-maximum contour of Gaussian fits to each total intensitybeam, while the crosses show the nominal polarisation orientation(heavy lines are the x or side-arm direction). Coordinates are scan circleradius ρ and scan circle phase φ, whichcorrespondtoco-latitudeandlongitude in ZS coordinates, i.e. where the spin axis gives the θ = 0direction and zero longitude is the meridian through the centre of thefocal plane. The large arrow indicates the direction the beam patternsscan across the sky.Circular polarisation is usually zero, at most a few tenths ofapercentforsomepointsources.MoreovertheLFIdetectorsarelinearly polarised so ξ is small; in the following we will usuallyneglect the circular polarisation terms.The LFI consists of eleven receiver chain assemblies(RCAs), each comprising a feed horn which couples radiationfrom Planck’s optics into an orthomode transducer (OMT)which separates it into two (nominally) orthogonal linearly polarisedcomponents along the so-called “side” and “main” OMTarms (D’Arcangelo et al. 2009b). The signal in each arm is separatelyamplified and detected by its own pseudo-correlation receiver,in which the radiation from the sky, via the telescope,feed, and OMT is differenced against thermal emission from acold load at a nominal 4 K (Bersanelli et al. 2010). There isaseparate4-KloadforeacharmofeachRCA;however,thetwo loads for a given RCA are located physically close together,so that drifts in the load temperature are strongly correlated betweenthe two (Valenziano et al. 2009).By summing and differencing the calibrated outputs of thesetwo radiometers, this configuration allows the recovery of I andone component of the (Q, U) vector,whichwedenoteQ H ,thatis, Stokes Q in the horn coordinate frame.Initially we consider the quasi-monochromatic case and takethe beam to be a delta-function measure of the sky brightness inthe pointing direction. To expressdeparturesfromtheidealcasewe write the estimated gains ˜G =Γ/(1 + γ), Λ=(1 − η)/(1 +η) ≈ 1−2η (we call η the cross-polar leakage), ψ s = ψ 0 + δ s ,and ψ m = ψ 0 + δ m + π/2, where subscripts “s” and “m” denotethe side and main OMT arms. Using tildes to indicate quantities˜Q H = P s / ˜G s − P m / ˜G m (8)≈ γ s − γ mI2+ (1 + ¯γ)(1 − 2¯η) [ Q cos 2(θ 0 + ¯δ) + U sin 2(θ 0 + ¯δ) ] . (9)While Eq. (9) isafirst-orderapproximationasitstands,aslongas the receiver remains linear it can be made exact by relaxingthe requirements that ¯γ, ¯η,and¯δ represent precisely the averagesof the corresponding side- and main-arm parameters. Thus thereis no need to determine these parameters for the individual detectors:it suffices to measure effective polefficiencies and anglesfor each feed. In particular, any failure of orthogonality (δ s δ m )affects Q H via the effective ¯Λ =1 − 2¯η (at second order, so notapparent in Eq. (9)).We will show that the LFI is remarkably close to an idealpolarimeter with η < ∼ O ( 10 −3) and δ < ∼ O ( 10 −2 rad ) .Whilethebasic gain calibration is expected to be good to a few tenths ofapercentatworst(Sect.5.1), two effects can lead to relativelylarge gain mismatch (γ s − γ m )/2, and hence significant “forwardpolconversion”, i.e. contamination of the polarisation signal bytotal intensity 4 .ThistermisimportantbecauseI is large comparedto Q H .The first such effect is that, due to the finite bandwidth, thecalibration can only be exact for one spectral shape – in practicethat of CMB fluctuations since the CMB dipole is the primarycalibration source (Cappellini et al. 2003). Due to differencesbetween the bandpasses of different detectors, includingbetween the two arms in each RCA, this gives forward polconversionfor non-CMB emission, with amplitudes of up to severalpercent for typical spectra. This is discussed in more detailin Sect. 5.2. Thesecondeffect is that our Γ includes the overallbeam profile; hence even when the data are well-calibratedfor resolved emission, differences between the beam shapes forthe two polarisations will give polconversion. The relevant beampatterns are analysed in Sect. 5.4,whiletheimpactofsuchnonidealbeams on the maps and power spectra, and strategies forcorrection, are reviewed in Sect. 7.6.4 This quantity is known by a variety of names, e.g. “instrumental polarisation”(Tinbergen 1996); we prefer the unambiguous terminologyof Hamaker (2000).Page 4 of 26
J. P. Leahy et al.: Planck pre-launch status: Expected LFI polarisation capabilityIf the detectors were not subject to systematic errors andall beamshapes were identical, the “optimal” solution for lowestrandom errors would weight all data by their inverse variancesand determine (I, Q, U) fromaleast-squaresanalysisofall the observations of each pixel. In contrast, use of the sumand difference signal, as discussed in this section, is equivalentto using equal weights for the two detectors in each RCA. Inpractice, the beams from the two detectors in each RCA are verymuch closer in shape than the beams from different RCAs (cf.Sandri et al. 2010, andSect.5.4). Therefore use of the differencesignal to find Q and U is preferred because forward polconversiondue to beam differences is much worse for a globalleast-squares solution, as previously found in the analysis of datafrom BOOMERanG (Jones et al. 2007) andWMAP(Hinshawet al. 2009) 5 .Useofthedifference signal is also expected toameliorate various systematics common to the two OMT arms,for instance contamination of the signal by thermal fluctuationsof the RCAs and 4 K loads (cf. Sect. 6). (It has no effect onpolconversion due to bandpass differences, of course).To quantify this, we note that although the noise propertiesof the LFI receivers are fairly well matched, in a few RCAsthe white-noise sensitivities of the two arms differ by ≈20%(Meinhold et al. 2009), which gives a 40% difference in inversevarianceweighting. Such a large difference would give significantpolconversion in the final maps. On the other hand, use ofthe difference signal has a very minor effect on the overall noiselevel, the worst case being at 30 GHz where it would be ≈2%higher than optimal. In contrast, there are no strong reasons toprefer the unweighted sum signal for Stokes I, giventhatthisonly improves cancellation of “reverse polconversion”, i.e. leakageof Q and U into the much stronger I.3.2. Focal plane arrangementFigure 2 shows the positions and orientations of the LFI beamsas projected on the sky, while the same data are listed in Table 1.The polarisation angles quoted account for the slight rotationinduced by the telescope optics, which explains why the sideand main arm angles do not differ by exactly 90 ◦ .The (Q, U)vectorateachskypixelismeasuredintwoways.The most important is that all but one of the LFI feed horns arearranged in pairs which (nominally) follow the same scan path,and whose polarisation angles differ by approximately 45 ◦ .Thusthe second horn effectively measures U to the first horn’s Q.In addition, over the course of a year, each LFI horn willscan each sky pixel along at least two different scan paths, inprinciple allowing the recovery of polarisation from the data forasinglehorn(Fig.3). In practice the angle between the scanpaths is usually not large (typically 10 ◦ –20 ◦ ), leading to largeand anisotropic errors in (Q, U) forsingle-hornmeasurements.The exception to this rule are the “deep regions” near the eclipticpoles, where each pixel is scanned several times with a widerange of scan angles.Horn LFI-24 has no matching partner. Consequently the44-GHz polarisation measurements derived from all three hornswill be significantly asymmetric (cf. Sect. 7.2), since for eachpixel a roughly isotropic measurement of (Q, U) fromLFI-25and -26 will be combined with ameasurementfromLFI-24ofasingle component (approximately Q in ecliptic coordinates). Weemphasise that no biases are caused by such an asymmetric errordistribution. It is true that an optimal arrangement of three horns5 An alternative approach is to attempt to deconvolve the beam differences;cf. discussion in Sect. 7.6.Fig. 3. Illustration of measurements in the (Q, U)plane.Eachvisittothepixel by each horn measures Q H at a different orientation, shown by thearrows Q 1 , Q 2 etc., and hence constrains (Q, U) toabandintheplane(colour coded to match the relevant arrow). This schematic illustrationcan be considered to represent either four visits by a single horn, or twovisits by a pair of horns oriented 45 ◦ apart (first pair is Q 1 [blue] & Q 4[green], second Q 2 [purple] & Q 3 [yellow]). If the errors in each visitare Gaussian, the least-squares combined error solution is an ellipticalGaussian in (Q, U), shown as contours of χ 2 ,evenif,ashere,individualmeasurements are formally inconsistent with each other.would have used the available data to better effect, for instancehaving all horns on the same scan circle (same ρ), with polarisationangles differing by 120 ◦ ,butnosucharrangementwasfeasible given other constraints.Minor asymmetries in the (Q, U)errordistributionwilloccurin all bands due to sensitivity differences between receivers, tothe fact that the pairs of horns are not oriented at exactly 45 ◦(Table 1), and to the impact on the scan pattern of the expectedslight misalignment of the spin axis. This is expected to driftrelative to the satellite structure since consumption of fuel andcryogens will alter the moment of inertia. As a result, the actualscan circles for matched pairs will not be exactly identical. Thespin axis misalignment from ˆX SC is expected to be < ∼ 5arcmin(Tauber et al. 2010a), giving offsets between lead and trail scansof < ∼ 0.035 FWHM even in the worst case (LFI-18 and -23, theouter pair of 70 GHz horns).The values listed in Table 1 are the nominal design values.The exact direction of the spin axis will be calibrated in flightby the star trackers, while the focal plane geometry will be calculatedusing observations of bright point sources, in particularplanets. Hence (ρ, φ) willbeknowntosub-arcminuteprecisionfor all beams. Determination of polarisation angles ψ is moreproblematic. The values quoted are based on the design of thefocal plane assembly (FPA), propagated using the GRASP physicaloptics code to the far field (Sandri et al. 2010). The GRASPcode has been validated by comparison between simulations andcompact array measurements of the radio frequency qualificationmodel (RFQM) telescope (Tauber et al. 2010b). In manyPage 5 of 26
- Page 85 and 86: A&A 520, A4 (2010)Fig. 19. Picture
- Page 87 and 88: A&A 520, A4 (2010)Table 10. Main ch
- Page 89 and 90: Table 13. Principal requirements an
- Page 91 and 92: A&A 520, A5 (2010)DOI: 10.1051/0004
- Page 93 and 94: A. Mennella et al.: LFI calibration
- Page 95 and 96: A. Mennella et al.: LFI calibration
- Page 97 and 98: A. Mennella et al.: LFI calibration
- Page 99 and 100: A. Mennella et al.: LFI calibration
- Page 101 and 102: A. Mennella et al.: LFI calibration
- Page 103 and 104: A. Mennella et al.: LFI calibration
- Page 105 and 106: D.1. Step 1-extrapolate uncalibrate
- Page 107 and 108: A&A 520, A6 (2010)DOI: 10.1051/0004
- Page 109 and 110: F. Villa et al.: Calibration of LFI
- Page 111 and 112: F. Villa et al.: Calibration of LFI
- Page 113 and 114: F. Villa et al.: Calibration of LFI
- Page 115 and 116: F. Villa et al.: Calibration of LFI
- Page 117 and 118: F. Villa et al.: Calibration of LFI
- Page 119 and 120: F. Villa et al.: Calibration of LFI
- Page 121 and 122: A&A 520, A7 (2010)DOI: 10.1051/0004
- Page 123 and 124: M. Sandri et al.: Planck pre-launch
- Page 126 and 127: A&A 520, A7 (2010)Fig. 8. Footprint
- Page 128 and 129: -30-40-30-6-3-20A&A 520, A7 (2010)0
- Page 130 and 131: A&A 520, A7 (2010)Table 4. Galactic
- Page 132 and 133: A&A 520, A7 (2010)Fig. A.1. Polariz
- Page 134 and 135: A&A 520, A8 (2010)inflation, giving
- Page 138 and 139: A&A 520, A8 (2010)ways the most str
- Page 140 and 141: unmodelled long-timescale thermally
- Page 142 and 143: A&A 520, A8 (2010)Fig. 5. Polarisat
- Page 144 and 145: A&A 520, A8 (2010)Table 3. Band-ave
- Page 146 and 147: A&A 520, A8 (2010)where S stands fo
- Page 148 and 149: A&A 520, A8 (2010)Fig. 11. Simulate
- Page 150 and 151: stored in the LFI instrument model,
- Page 152 and 153: A&A 520, A8 (2010)Table 5. Statisti
- Page 154 and 155: A&A 520, A8 (2010)comparable in siz
- Page 156 and 157: A&A 520, A8 (2010)Table B.1. Main b
- Page 158 and 159: A&A 520, A8 (2010)Bond, J. R., Jaff
- Page 160 and 161: A&A 520, A9 (2010)- (v) an optical
- Page 162 and 163: A&A 520, A9 (2010)Fig. 2. The Russi
- Page 164 and 165: A&A 520, A9 (2010)Table 3. Estimate
- Page 166 and 167: A&A 520, A9 (2010)Fig. 7. Picture o
- Page 168 and 169: A&A 520, A9 (2010)Fig. 9. Cosmic ra
- Page 170 and 171: A&A 520, A9 (2010)Fig. 13. Principl
- Page 172 and 173: A&A 520, A9 (2010)Fig. 16. Noise sp
- Page 174 and 175: A&A 520, A9 (2010)Table 6. Basic ch
- Page 176 and 177: A&A 520, A9 (2010)with warm preampl
- Page 178 and 179: A&A 520, A9 (2010)20 Laboratoire de
- Page 180 and 181: A&A 520, A10 (2010)Table 1. HFI des
- Page 182 and 183: A&A 520, A10 (2010)based on the the
- Page 184 and 185: A&A 520, A10 (2010)Fig. 6. The Satu
A&A 520, A8 (2010)estimated from the data, the calibrated sum isĨ = P s / ˜G s + P m / ˜G m (6)[ 1 + γs= I + 1 + γ ]m+2 21 + γ s(1 − 2η s )[Q cos 2(θ 0 + δ s ) + U sin 2(θ 0 + δ s )]2− 1 + γ m(1 − 2η m )[Q cos 2(θ 0 + δ m ) + U sin 2(θ 0 + δ m )]2( γs − γ)m≈ (1 + ¯γ)I + − (η s − η m ) Q H + (δ s − δ m )U H . (7)2The last line is a first-order approximation in the small quantitiesγ, η and δ. Q H and U H now refer to the nominal horn frame,rotated by θ 0 = ψ 0 + χ from the sky frame, and bars indicate averagesbetween side and main arms. Polarisation is rather weak,√Q2 + U 2 ∼ 0.1I, evenwhenI represents the total intensity aftersubtraction of the dominant, and unpolarised, monopole anddipole terms, so the polarisation terms are effectively of secondorder and are usually ignored. The calibrated difference signal isFig. 2. Geometry of the LFI beams as projected on the sky. The ellipsesshow the half-maximum contour of Gaussian fits to each total intensitybeam, while the crosses show the nominal polarisation orientation(heavy lines are the x or side-arm direction). Coordinates are scan circleradius ρ and scan circle phase φ, whichcorrespondtoco-latitudeandlongitude in ZS coordinates, i.e. where the spin axis gives the θ = 0direction and zero longitude is the meridian through the centre of thefocal plane. The large arrow indicates the direction the beam patternsscan across the sky.Circular polarisation is usually zero, at most a few tenths ofapercentforsomepointsources.MoreovertheLFIdetectorsarelinearly polarised so ξ is small; in the following we will usuallyneglect the circular polarisation terms.The LFI consists of eleven receiver chain assemblies(RCAs), each comprising a feed horn which couples radiationfrom <strong>Planck</strong>’s optics into an orthomode transducer (OMT)which separates it into two (nominally) orthogonal linearly polarisedcomponents along the so-called “side” and “main” OMTarms (D’Arcangelo et al. 2009b). The signal in each arm is separatelyamplified and detected by its own pseudo-correlation receiver,in which the radiation from the sky, via the telescope,feed, and OMT is differenced against thermal emission from acold load at a nominal 4 K (Bersanelli et al. 2010). There isaseparate4-KloadforeacharmofeachRCA;however,thetwo loads for a given RCA are located physically close together,so that drifts in the load temperature are strongly correlated betweenthe two (Valenziano et al. 2009).By summing and differencing the calibrated outputs of thesetwo radiometers, this configuration allows the recovery of I andone component of the (Q, U) vector,whichwedenoteQ H ,thatis, Stokes Q in the horn coordinate frame.Initially we consider the quasi-monochromatic case and takethe beam to be a delta-function measure of the sky brightness inthe pointing direction. To expressdeparturesfromtheidealcasewe write the estimated gains ˜G =Γ/(1 + γ), Λ=(1 − η)/(1 +η) ≈ 1−2η (we call η the cross-polar leakage), ψ s = ψ 0 + δ s ,and ψ m = ψ 0 + δ m + π/2, where subscripts “s” and “m” denotethe side and main OMT arms. Using tildes to indicate quantities˜Q H = P s / ˜G s − P m / ˜G m (8)≈ γ s − γ mI2+ (1 + ¯γ)(1 − 2¯η) [ Q cos 2(θ 0 + ¯δ) + U sin 2(θ 0 + ¯δ) ] . (9)While Eq. (9) isafirst-orderapproximationasitstands,aslongas the receiver remains linear it can be made exact by relaxingthe requirements that ¯γ, ¯η,and¯δ represent precisely the averagesof the corresponding side- and main-arm parameters. Thus thereis no need to determine these parameters for the individual detectors:it suffices to measure effective polefficiencies and anglesfor each feed. In particular, any failure of orthogonality (δ s δ m )affects Q H via the effective ¯Λ =1 − 2¯η (at second order, so notapparent in Eq. (9)).We will show that the LFI is remarkably close to an idealpolarimeter with η < ∼ O ( 10 −3) and δ < ∼ O ( 10 −2 rad ) .Whilethebasic gain calibration is expected to be good to a few tenths ofapercentatworst(Sect.5.1), two effects can lead to relativelylarge gain mismatch (γ s − γ m )/2, and hence significant “forwardpolconversion”, i.e. contamination of the polarisation signal bytotal intensity 4 .ThistermisimportantbecauseI is large comparedto Q H .The first such effect is that, due to the finite bandwidth, thecalibration can only be exact for one spectral shape – in practicethat of CMB fluctuations since the CMB dipole is the primarycalibration source (Cappellini et al. 2003). Due to differencesbetween the bandpasses of different detectors, includingbetween the two arms in each RCA, this gives forward polconversionfor non-CMB emission, with amplitudes of up to severalpercent for typical spectra. This is discussed in more detailin Sect. 5.2. Thesecondeffect is that our Γ includes the overallbeam profile; hence even when the data are well-calibratedfor resolved emission, differences between the beam shapes forthe two polarisations will give polconversion. The relevant beampatterns are analysed in Sect. 5.4,whiletheimpactofsuchnonidealbeams on the maps and power spectra, and strategies forcorrection, are reviewed in Sect. 7.6.4 This quantity is known by a variety of names, e.g. “instrumental polarisation”(Tinbergen 1996); we prefer the unambiguous terminologyof Hamaker (2000).Page 4 of 26


