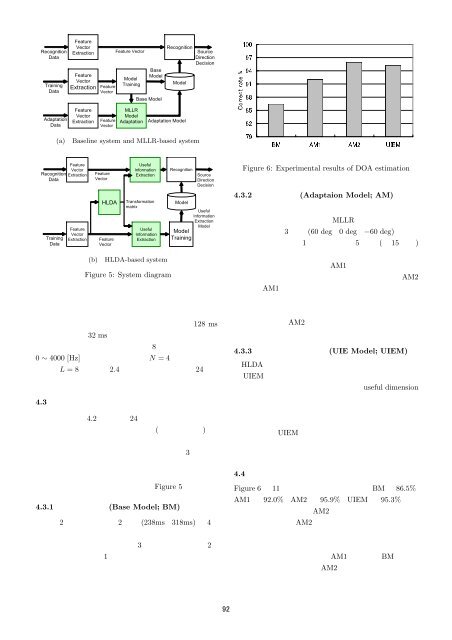
CoRecognitionDataTrainingDataFeatureVectorExtractionFeatureVectorExtractionFeatureVectorFeature VectorModelTrainingBaseModelBase ModelRecognitionModelSourceDirectionDecision1009794 %etar 91cter 88AdaptationDataFeatureVectorExtractionFeatureVectorMLLRModelAdaptationAdaptation Modelr8582(a)Baseline system and MLLR-based system79BM AM1 AM2 UIEMRecognitionDataTrainingDataFeatureVectorExtractionFeatureVectorExtraction(b)FeatureVectorHLDAFeatureVectorUsefulInformationExtractionTransformationmatrixUsefulInformationExtractionHLDA-based systemFigure 5: System diagramRecognitionModelSourceDirectionDecisionUsefulInformationExtractionModelModelTraining 128 ms 32 ms 80 ∼ 4000 [Hz] N =4 L =82.4 24 4.3 4.2 24 ()3 Figure 5 4.3.1 (Base Model; BM) 2 2 (238ms318ms) 4 3 2 1 Figure 6: Experimental results of DOA estimation4.3.2 (Adaptaion Model; AM) MLLR 3 (60 deg0 deg−60 deg) 1 5 ( 15 ) AM1 AM2AM1 AM2 4.3.3 (UIE Model; UIEM)HLDA UIEM useful dimensionUIEM 4.4 Figure 6 11 BM 86.5%AM1 92.0%AM2 95.9%UIEM 95.3% AM2 AM2 AM1 BM AM2 92
Class 10degClass 20degClass 10degClass 20degClass 30degClass 30degFigure 7: Data distribution before HLDAFigure 8: Data distribution after HLDAUIEM AM2 usefuldimension 14 UIEM BM 65% HLDA HLDA HLDA HLDA Figure 7 Figure7 17 18 HLDA Figure 8 Figure 8 1 2 HLDA HLDAHLDA 5 HLDA 65% [1] “ 4 ,” SIG-Challenge-0420-4pp.21-27Dec.2004.[2] N.Mochiki, T.Sekiya, T.Ogawa and T.Kobayashi,“Recognition of Three Simultaneous Utteranceof Speech by Four-line Directivity MicrophoneMounted on Head of Robot,” Proc.ICSLP, pp.821-824,2004.[3] “ 4 ,” , pp.821-824, 2005.[4] K.NakadaiD.MatusuraH.G.OkunoH.Kitano,“Applying Scattering Theory to Robot AuditionSystem,” Proc.IROS, pp.1147-1152, Oct.2003.[5] N.Kumar, “Investigation of silicon-auditory modelsand generalizationof linear discriminant analysis forimproved speech recognition,” Ph.D. dissertation,Johns Hopkins Univ., Baltimore, MD, 1997.[6] M.J.Hunt and C.Lefebre, “A comparison of severalacoustic representations for speech recognition withdegraded and undegraded speech,” Proc.ICASSP,pp.262-265, 1989.[7] P.Brown, “The acoustic-modeling problem in automaticspeech recognition,” Ph.D. dissertation, IBM93
- Page 4:
SCOT(Smoothed Coherence Transform)P
- Page 8 and 9:
Particle (a)(b)φ12(τ )[14]x ( t )
- Page 10 and 11:
- 8 -
- Page 12 and 13:
1 () 2 SIMO-ICA 3 SIMO-ICA tele
- Page 14:
ICAy FCy FCy SIMO-ICAs 1(t)x 1(t)1(
- Page 17 and 18:
[15] Y. Mori, H. Saruwatari, T. Tak
- Page 19 and 20:
社 団 法 人 人 工 知 能 学
- Page 21 and 22:
• 音 源 位 置マイク配 置
- Page 23 and 24:
Table 1: 6 : SIR (dB)SIR 1 SIR 2 S
- Page 25 and 26:
社 団 法 人 人 工 知 能 学
- Page 27 and 28:
SIMO-ICA SIMO Figure 2(a)SIMO-ICA
- Page 29 and 30:
Binary maskConventional ICAConventi
- Page 31 and 32:
社 団 法 人 人 工 知 能 学
- Page 33 and 34:
k lo (l), k c (l), k hi (l) l k c
- Page 35 and 36:
5.75 m4.33 mNoise1.15 mUser 40°2.1
- Page 38 and 39:
おける 方 法 論 に 関 し
- Page 40 and 41:
Fig.6 は 幼 児 の ABR (Auditory
- Page 42 and 43:
ンターフェースはスパイ
- Page 44 and 45: マイクロホン[ 正 面 ][ 左
- Page 46 and 47: s(k)Crosstalkn(k)R S(k)X P(k)X R(k)
- Page 48 and 49: する 隠 れマルコフモデル
- Page 50 and 51: 123ÙÖ ½ ¾º¾ ´º ½µ ´º
- Page 52 and 53: ÌÐ ½ ¿º¾ ÅÎÆÇÂ
- Page 54 and 55: ÁÒØÖÒØÓÒÐ ÓÒÖÒ ÓÒ Á
- Page 56 and 57: 例 えば、 同 一 時 間 差
- Page 58 and 59: いて、θの 絶 対 値 が 大
- Page 60 and 61: Fig.11 にこのシステムの 処
- Page 62 and 63: 5 , 2 EMIEWFig.1 EMIEW EMIEW 6 ,
- Page 64: 0 P th , (14) 4.4 3 4 4 1 , 3
- Page 67 and 68: 社 団 法 人 人 工 知 能 学
- Page 69 and 70: 3.1. 3.2. Fig. 3. The
- Page 71 and 72: 4.1. Fig. 5. The time co
- Page 73 and 74: 社 団 法 人 人 工 知 能 学
- Page 75 and 76: modal (m, ), whispery (w, ), aspir
- Page 77 and 78: Aperiodicity rate (APR)TLR (Time-La
- Page 79 and 80: 社 団 法 人 人 工 知 能 学
- Page 81 and 82: , À, WDS-BF Ñ À℄·
- Page 83 and 84: Table 1: Localization Error of A Si
- Page 85 and 86: 社 団 法 人 人 工 知 能 学
- Page 87 and 88: を 行 い, 閾 値 処 理 を
- Page 89 and 90: 4. 音 声 対 話 制 御 実 験H
- Page 91 and 92: 社 団 法 人 人 工 知 能 学
- Page 93: 3 HLDAMLLR [3] (Useful Information
- Page 97 and 98: 社 団 法 人 人 工 知 能 学
- Page 99 and 100: 赤 い 長 方 形 内 ). 以 下
- Page 101 and 102: 5.2 音 場 計 測 結 果(dB SPL)
- Page 103 and 104: 社 団 法 人 人 工 知 能 学
- Page 105 and 106: a) 90 b) 90 MFMc) d) MFMe) 9
- Page 107 and 108: (3) MFT Julius 7.1 Figure 4: SIG2