

第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学
第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学
第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
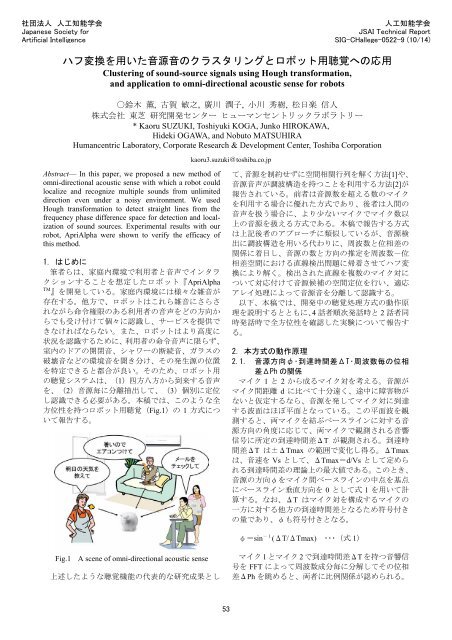
社 団 法 人 人 工 知 能 学 会Japanese Society forArtificial Intelligence人 工 知 能 学 会JSAI Technical ReportSIG-CHallege-0522-9 (10/14)ハフ 変 換 を 用 いた 音 源 音 のクラスタリングとロボット 用 聴 覚 への 応 用Clustering of sound-source signals using Hough transformation,and application to omni-directional acoustic sense for robots〇 鈴 木 薫 , 古 賀 敏 之 , 廣 川 潤 子 , 小 川 秀 樹 , 松 日 楽 信 人株 式 会 社 東 芝 研 究 開 発 センター ヒューマンセントリックラボラトリー* Kaoru SUZUKI, Toshiyuki KOGA, Junko HIROKAWA,Hideki OGAWA, and Nobuto MATSUHIRAHumancentric Laboratory, Corporate Research & Development Center, Toshiba Corporationkaoru3.suzuki@toshiba.co.jpAbstract— In this paper, we proposed a new method ofomni-directional acoustic sense with which a robot couldlocalize and recognize multiple sounds from unlimiteddirection even under a noisy environment. We usedHough transformation to detect straight lines from thefrequency phase difference space for detection and localizationof sound sources. Experimental results with ourrobot, ApriAlpha were shown to verify the efficacy ofthis method.1. はじめに筆 者 らは、 家 庭 内 環 境 で 利 用 者 と 音 声 でインタラクションすることを 想 定 したロボット『ApriAlphaTM 』を 開 発 している。 家 庭 内 環 境 には 様 々な 雑 音 が存 在 する。 他 方 で、ロボットはこれら 雑 音 にさらされながら 命 令 権 限 のある 利 用 者 の 音 声 をどの 方 向 からでも 受 け 付 けて 個 々に 認 識 し、サービスを 提 供 できなければならない。また、ロボットはより 高 度 に状 況 を 認 識 するために、 利 用 者 の 命 令 音 声 に 限 らず、室 内 のドアの 開 閉 音 、シャワーの 断 続 音 、ガラスの破 壊 音 などの 環 境 音 を 聞 き 分 け、その 発 生 源 の 位 置を 特 定 できると 都 合 が 良 い。そのため、ロボット 用の 聴 覚 システムは、(1) 四 方 八 方 から 到 来 する 音 声を、(2) 音 源 毎 に 分 離 抽 出 して、(3) 個 別 に 定 位し 認 識 できる 必 要 がある。 本 稿 では、このような 全方 位 性 を 持 つロボット 用 聴 覚 (Fig.1)の 1 方 式 について 報 告 する。て、 音 源 を 制 約 せずに 空 間 相 関 行 列 を 解 く 方 法 [1]や、音 源 音 声 が 調 波 構 造 を 持 つことを 利 用 する 方 法 [2]が報 告 されている。 前 者 は 音 源 数 を 超 える 数 のマイクを 利 用 する 場 合 に 優 れた 方 式 であり、 後 者 は 人 間 の音 声 を 扱 う 場 合 に、より 少 ないマイクでマイク 数 以上 の 音 源 を 扱 える 方 式 である。 本 稿 で 報 告 する 方 式は 上 記 後 者 のアプローチに 類 似 しているが、 音 源 検出 に 調 波 構 造 を 用 いる 代 わりに、 周 波 数 と 位 相 差 の関 係 に 着 目 し、 音 源 の 数 と 方 向 の 推 定 を 周 波 数 - 位相 差 空 間 における 直 線 検 出 問 題 に 帰 着 させてハフ 変換 により 解 く。 検 出 された 直 線 を 複 数 のマイク 対 について 対 応 付 けて 音 源 候 補 の 空 間 定 位 を 行 い、 適 応アレイ 処 理 によって 音 源 音 を 分 離 して 認 識 する。以 下 、 本 稿 では、 開 発 中 の 聴 覚 処 理 方 式 の 動 作 原理 を 説 明 するとともに、4 話 者 順 次 発 話 時 と 2 話 者 同時 発 話 時 で 全 方 位 性 を 確 認 した 実 験 について 報 告 する。2. 本 方 式 の 動 作 原 理2.1. 音 源 方 向 φ・ 到 達 時 間 差 ΔT・ 周 波 数 毎 の 位 相差 ΔPh の 関 係マイク 1 と 2 から 成 るマイク 対 を 考 える。 音 源 がマイク 間 距 離 d に 比 べて 十 分 遠 く、 途 中 に 障 害 物 がないと 仮 定 するなら、 音 源 を 発 してマイク 対 に 到 達する 波 面 はほぼ 平 面 となっている。この 平 面 波 を 観測 すると、 両 マイクを 結 ぶベースラインに 対 する 音源 方 向 の 角 度 に 応 じて、 両 マイクで 観 測 される 音 響信 号 に 所 定 の 到 達 時 間 差 ΔT が 観 測 される。 到 達 時間 差 ΔT は±ΔTmax の 範 囲 で 変 化 し 得 る。ΔTmaxは、 音 速 を Vs として、ΔTmax=d/Vs として 定 められる 到 達 時 間 差 の 理 論 上 の 最 大 値 である。このとき、音 源 の 方 向 φをマイク 間 ベースラインの 中 点 を 基 点にベースライン 垂 直 方 向 を 0 として 式 1 を 用 いて 計算 する。なお、ΔT はマイク 対 を 構 成 するマイクの一 方 に 対 する 他 方 の 到 達 時 間 差 となるため 符 号 付 きの 量 であり、φも 符 号 付 きとなる。φ=sin -1 (ΔT/ΔTmax) ・・・( 式 1)Fig.1 A scene of omni-directional acoustic sense上 述 したような 聴 覚 機 能 の 代 表 的 な 研 究 成 果 としマイク 1 とマイク 2 で 到 達 時 間 差 ΔT を 持 つ 音 響 信号 を FFT によって 周 波 数 成 分 毎 に 分 解 してその 位 相差 ΔPh を 眺 めると、 両 者 に 比 例 関 係 が 認 められる。53













