

第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学
第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学
第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
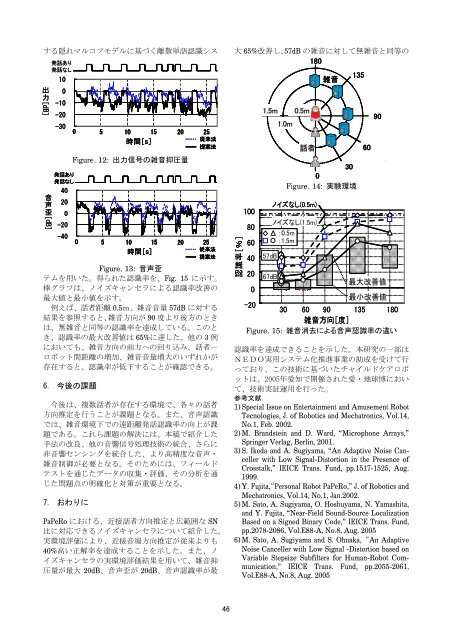
する 隠 れマルコフモデルに 基 づく 離 散 単 語 認 識 シス出力[dB]発 話 あり発 話 なし音声歪[dB]100-10-20-30発 話 あり発 話 なし40200-20-40Figure. 12: 出 力 信 号 の 雑 音 抑 圧 量Figure. 13: 音 声 歪テムを 用 いた。 得 られた 認 識 率 を、Fig. 15 に 示 す。棒 グラフは、ノイズキャンセラによる 認 識 率 改 善 の最 大 値 と 最 小 値 を 示 す。例 えば、 話 者 距 離 0.5m、 雑 音 音 量 57dB に 対 する結 果 を 参 照 すると、 雑 音 方 向 が 90 度 より 後 方 のときは、 無 雑 音 と 同 等 の 認 識 率 を 達 成 している。このとき、 認 識 率 の 最 大 改 善 値 は 65%に 達 した。 他 の 3 例においても、 雑 音 方 向 の 前 方 への 回 り 込 み、 話 者 -ロボット 間 距 離 の 増 加 、 雑 音 音 量 増 大 のいずれかが存 在 すると、 認 識 率 が 低 下 することが 確 認 できる。6. 今 後 の 課 題今 後 は、 複 数 話 者 が 存 在 する 環 境 で、 各 々の 話 者方 向 推 定 を 行 うことが 課 題 となる。また、 音 声 認 識では、 雑 音 環 境 下 での 遠 距 離 発 話 認 識 率 の 向 上 が 課題 である。これら 課 題 の 解 決 には、 本 稿 で 紹 介 した手 法 の 改 良 、 他 の 音 響 信 号 処 理 技 術 の 統 合 、さらに非 音 響 センシングを 統 合 した、より 高 精 度 な 音 声 ・雑 音 制 御 が 必 要 となる。そのためには、フィールドテストを 通 じたデータの 収 集 ・ 評 価 、その 分 析 を 通じた 問 題 点 の 明 確 化 と 対 策 が 重 要 となる。7. おわりに0 5 10 15 20 25従 来 法時 間 [s]提 案 法0 5 10 15 20 25従 来 法時 間 [s]提 案 法PaPeRo における、 近 接 話 者 方 向 推 定 と 広 範 囲 な SN比 に 対 応 できるノイズキャンセラについて 紹 介 した。実 環 境 評 価 により、 近 接 音 場 方 向 推 定 が 従 来 よりも40% 高 い 正 解 率 を 達 成 することを 示 した。また、ノイズキャンセラの 実 環 境 評 価 結 果 を 用 いて、 雑 音 抑圧 量 が 最 大 20dB、 音 声 歪 が 20dB、 音 声 認 識 率 が 最大 65% 改 善 し、57dB の 雑 音 に 対 して 無 雑 音 と 同 等 の180認 識 率 [%]1008060401.5m 0.5m1.0m57dB話 者雑 音300Figure. 14: 実 験 環 境ノイズなし(0.5m)ノイズなし(1.5m):0.5m:1.5m13560902067dB最 大 改 善 値0最 小 改 善 値-2030 60 90 135 180雑 音 方 向 [ 度 ]Figure. 15: 雑 音 消 去 による 音 声 認 識 率 の 違 い認 識 率 を 達 成 できることを 示 した。 本 研 究 の 一 部 はNEDO 実 用 システム 化 推 進 事 業 の 助 成 を 受 けて 行っており、この 技 術 に 基 づいたチャイルドケアロボットは、2005 年 愛 知 で 開 催 された 愛 ・ 地 球 博 において、 技 術 実 証 運 用 を 行 った。参 考 文 献1) Special Issue on Entertainment and Amusement RobotTecnologies, J. of Robotics and Mechatronics, Vol.14,No.1, Feb. 2002.2) M. Brandstein and D. Ward, “Microphone Arrays,”Springer Verlag, Berlin, 2001.3) S. Ikeda and A. Sugiyama, “An Adaptive Noise Cancellerwith Low Signal-Distortion in the Presence ofCrosstalk,” IEICE Trans. Fund, pp.1517-1525, Aug.1999.4) Y. Fujita,“Personal Robot PaPeRo,” J. of Robotics andMechatronics, Vol.14, No.1, Jan.2002.5) M. Sato, A. Sugiyama, O. Hoshuyama, N. Yamashita,and Y. Fujita, “Near-Field Sound-Source LocalizationBased on a Signed Binary Code,” IEICE Trans. Fund,pp.2078-2086, Vol.E88-A, No.8, Aug. 20056) M. Sato, A. Sugiyama and S. Ohnaka,“An AdaptiveNoise Canceller with Low Signal -Distortion based onVariable Stepsize Subfilters for Human-Robot Communication,”IEICE Trans. Fund, pp.2055-2061,Vol.E88-A, No.8, Aug. 200546













