

第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学
第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学
第22回 ロボット聴覚特集 - 奥乃研究室 - 京都大学

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
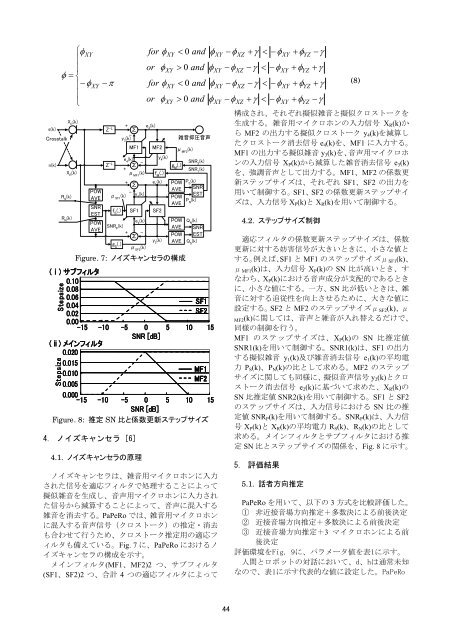
s(k)Crosstalkn(k)R S(k)X P(k)X R(k)R N(k)POWAVESNRESTPOWAVEZ -LZ -L+∑-y 3(k)MF1e 4(k)∑-+μ MF1(k)+∑-μ SF1(k) y 1(k)f S(.)SF1e 2(k)SNR P(k)+ -∑g S(.)μ SF2(k)e 3(k)MF2f M(.)e 1(k)SF2y 2(k)y 4(k)g M(.)雑 音 抑 圧 音 声POW P S(k)AVE SNRESTPOWPAVE N(k)POWAVEPOWAVEμ MF2(k)Figure. 7: ノイズキャンセラの 構 成SNR 2(k)SNR 1(k)Q N(k)SNRESTQ S(k)(ⅰ) サブフィルタ0.100.080.06SF10.040.02SF20.00-15 -10 -5 0 5 10 15(ⅱ) メインフィルタSNR [dB]0.0200.015MF10.010MF20.0050.000-15 -10 -5 0 5 10 15SNR [dB]Figure. 8: 推 定 SN 比 と 係 数 更 新 ステップサイズStepsizeStepsize⎧φXY⎪⎪φ = ⎨⎪−φ⎪⎩XY−π4. ノイズキャンセラ [6]4.1. ノイズキャンセラの 原 理for φfor φ> 0 and φノイズキャンセラは、 雑 音 用 マイクロホンに 入 力された 信 号 を 適 応 フィルタで 処 理 することによって擬 似 雑 音 を 生 成 し、 音 声 用 マイクロホンに 入 力 された 信 号 から 減 算 することによって、 音 声 に 混 入 する雑 音 を 消 去 する。PaPeRo では、 雑 音 用 マイクロホンに 混 入 する 音 声 信 号 (クロストーク)の 推 定 ・ 消 去も 合 わせて 行 うため、クロストーク 推 定 用 の 適 応 フィルタも 備 えている。Fig. 7 に、PaPeRo におけるノイズキャンセラの 構 成 を 示 す。メインフィルタ(MF1、MF2)2 つ、サブフィルタ(SF1、SF2)2 つ、 合 計 4 つの 適 応 フィルタによってororφφXYXYXYXY< 0 and φ> 0 and φ< 0 and φXYXYXYXY−φXZ+ γ < −φXY+ φYZ− γ−φXZ−γ< −φXY+ φYZ+ γ−φ− γ < −φ+ φ + γ (8)XZXY YZ−φXZ+ γ < −φXY+ φYZ− γ構 成 され、それぞれ 擬 似 雑 音 と 擬 似 クロストークを生 成 する。 雑 音 用 マイクロホンの 入 力 信 号 X R (k)から MF2 の 出 力 する 擬 似 クロストーク y 4 (k)を 減 算 したクロストーク 消 去 信 号 e 4 (k)を、MF1 に 入 力 する。MF1 の 出 力 する 擬 似 雑 音 y 3 (k)を、 音 声 用 マイクロホンの 入 力 信 号 X P (k)から 減 算 した 雑 音 消 去 信 号 e 3 (k)を、 強 調 音 声 として 出 力 する。MF1、MF2 の 係 数 更新 ステップサイズは、それぞれ SF1、SF2 の 出 力 を用 いて 制 御 する。SF1、SF2 の 係 数 更 新 ステップサイズは、 入 力 信 号 X P (k)と X R (k)を 用 いて 制 御 する。4.2. ステップサイズ 制 御適 応 フィルタの 係 数 更 新 ステップサイズは、 係 数更 新 に 対 する 妨 害 信 号 が 大 きいときに、 小 さな 値 とする。 例 えば、SF1 と MF1 のステップサイズμ SF1 (k)、μ MF1 (k)は、 入 力 信 号 X P (k)の SN 比 が 高 いとき、すなわち、X P (k)における 音 声 成 分 が 支 配 的 であるときに、 小 さな 値 にする。 一 方 、SN 比 が 低 いときは、 雑音 に 対 する 追 従 性 を 向 上 させるために、 大 きな 値 に設 定 する。SF2 と MF2 のステップサイズμ SF2 (k)、μMF2(k)に 関 しては、 音 声 と 雑 音 が 入 れ 替 えるだけで、同 様 の 制 御 を 行 う。MF1 のステップサイズは、X P (k)の SN 比 推 定 値SNR1(k)を 用 いて 制 御 する。SNR1(k)は、SF1 の 出 力する 擬 似 雑 音 y 1 (k) 及 び 雑 音 消 去 信 号 e 1 (k)の 平 均 電力 P S (k)、P N (k)の 比 として 求 める。MF2 のステップサイズに 関 しても 同 様 に、 擬 似 音 声 信 号 y 2 (k)とクロストーク 消 去 信 号 e 2 (k)に 基 づいて 求 めた、X R (k)のSN 比 推 定 値 SNR2(k)を 用 いて 制 御 する。SF1 と SF2のステップサイズは、 入 力 信 号 における SN 比 の 推定 値 SNR P (k)を 用 いて 制 御 する。SNR P (k)は、 入 力 信号 X P (k)と X R (k)の 平 均 電 力 R S (k)、R N (k)の 比 として求 める。メインフィルタとサブフィルタにおける 推定 SN 比 とステップサイズの 関 係 を、Fig. 8 に 示 す。5. 評 価 結 果5.1. 話 者 方 向 推 定PaPeRo を 用 いて、 以 下 の 3 方 式 を 比 較 評 価 した。1 非 近 接 音 場 方 向 推 定 + 多 数 決 による 前 後 決 定2 近 接 音 場 方 向 推 定 + 多 数 決 による 前 後 決 定3 近 接 音 場 方 向 推 定 +3 マイクロホンによる 前後 決 定評 価 環 境 をFig. 9に、パラメータ 値 を 表 1に 示 す。人 間 とロボットの 対 話 において、d、hは 通 常 未 知なので、 表 1に 示 す 代 表 的 な 値 に 設 定 した。PaPeRo44













