θ 1s 2 (8) (7) Kullback-Leibler Divergence W (ICAl) (f) Natural Gradient l (l =1,...,L−1) ICA Nonholonomic [5] FD-SIMO-ICA l (l =1,...,L− 1) ICA 4.25 0.58 mmLoudspeakersm)(Height:1.17 ( )t s 1 ) ( tm0.74W [j+1](ICAl) (f)[ { 〈= W [j](ICAl) (f) − α off-diagΦ}Y [j](ICAl) (f,t)H〉 · W [j](ICAl) (f)t{ 〈− off-diag Φ ( L−1∑X (f,t) −l ′ =1· (X L−1∑〉 }(f,t) − Y [j](ICAl ′ ) (f,t)) Htl ′ =1(Y [j](ICAl) (f,t) )Y [j](ICAl ′ ) (f,t))( L−1∑) ]· I − W [j](ICAl ′ ) (f) (11)l ′ =1m 1.50Microphones2.04 mm)(Height:1.17 ReverberationTime: 200 msθ 2m2.02HATSm4.25Figure 4: α Φ(·) [15]Φ (Y (f,t)) ≡ [ tanh(|Y 1 (f,t)|)e j·arg(Y1(f,t)) , ··· ,tanh(|Y L (f,t)|)e j·arg(YL(f,t))] T. (12)W (ICAl) (f) FD-SIMO-ICA FD-SIMO-ICA (9), (10) 1 Ŷ 1 (f,t) =m 1 (f,t) Y (ICA1)1 (f,t) (13)m 1 (f,t) |Y (ICA1)1 (f,t)| > |Y (ICA2)2 (f,t)| m 1 (f,t) = 1 m 1 (f,t) =0 2 Ŷ 2 (f,t) =m 2 (f,t) Y (ICA1)2 (f,t) (14)m 2 (f,t) |Y (ICA1)2 (f,t)| > |Y (ICA2)1 (f,t)| m 2 (f,t) = 1 m 2 (f,t) =0L = K>2 4 4.1 Figure 4 2 2 2 200 ms Brüel & Kjær Head And Torso Simulator(HATS; Figure 5 ) 2 (θ 1 ,θ 2 ) Figure 5: Head And Torso Simulator (θ 1 ,θ 2 )=(−60 ◦ , 60 ◦ ), (−60 ◦ , 0 ◦ ) 2 2 4 HumanSpeechLikeNoise 2 3 8kHz 1024 ±15 ◦ ±30 ◦ HRTF 4.2 A∼D 4 (A) (5) (B) (2) ICA(C) ICA (D) DOA HATS() Signal-to-NoiseRatio (SNR) dB Noise Reduction Rate(NRR) [8] SNR Figure 6 NRR 12 26
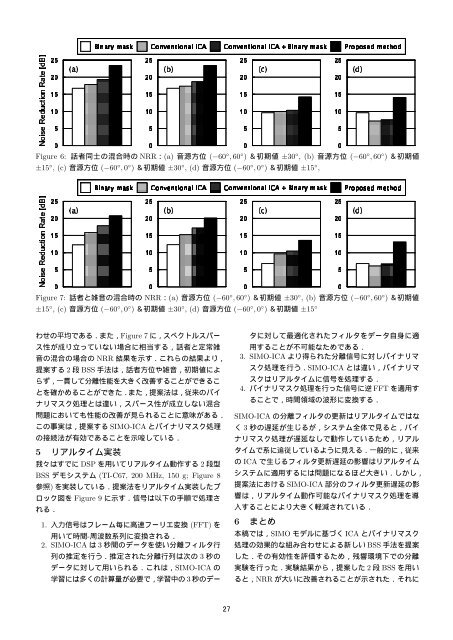
Binary maskConventional ICAConventional ICA + Binary maskProposed method]252525B25(a) (b) (c) (d)[dte202020a20Rn15io151515tcu1010d1010eRe5555isoFigure 6: NRR(a) (−60 ◦ , 60 ◦ ) ±30 ◦ ,(b) (−60 ◦ , 60 ◦ ) ±15 ◦ ,(c) (−60 ◦ , 0 ◦ ) ±30 ◦ ,(d) (−60 ◦ , 0 ◦ ) ±15 ◦ ,0000NBinary maskConventional ICAConventional ICA + Binary maskProposed method]25252525B(a) (b) (c) (d)[d20202020teaRn15151515tiocu10 d101010eR5555eisoFigure 7: NRR(a) (−60 ◦ , 60 ◦ ) ±30 ◦ ,(b) (−60 ◦ , 60 ◦ ) ±15 ◦ ,(c) (−60 ◦ , 0 ◦ ) ±30 ◦ ,(d) (−60 ◦ , 0 ◦ ) ±15 ◦0000NFigure 7 NRR 2 BSS SIMO-ICA 5 DSP 2 BSS (TI-C67, 200 MHz, 150 g; Figure 8) Figure 9 1. (FFT) -2. SIMO-ICA 3 3 SIMO-ICA 3 3. SIMO-ICA SIMO-ICA 4. FFT SIMO-ICA 3 ICA SIMO-ICA 6 SIMO ICA BSS 2 BSS NRR 27
- Page 4: SCOT(Smoothed Coherence Transform)P
- Page 8 and 9: Particle (a)(b)φ12(τ )[14]x ( t )
- Page 10 and 11: - 8 -
- Page 12 and 13: 1 () 2 SIMO-ICA 3 SIMO-ICA tele
- Page 14: ICAy FCy FCy SIMO-ICAs 1(t)x 1(t)1(
- Page 17 and 18: [15] Y. Mori, H. Saruwatari, T. Tak
- Page 19 and 20: 社 団 法 人 人 工 知 能 学
- Page 21 and 22: • 音 源 位 置マイク配 置
- Page 23 and 24: Table 1: 6 : SIR (dB)SIR 1 SIR 2 S
- Page 25 and 26: 社 団 法 人 人 工 知 能 学
- Page 27: SIMO-ICA SIMO Figure 2(a)SIMO-ICA
- Page 31 and 32: 社 団 法 人 人 工 知 能 学
- Page 33 and 34: k lo (l), k c (l), k hi (l) l k c
- Page 35 and 36: 5.75 m4.33 mNoise1.15 mUser 40°2.1
- Page 38 and 39: おける 方 法 論 に 関 し
- Page 40 and 41: Fig.6 は 幼 児 の ABR (Auditory
- Page 42 and 43: ンターフェースはスパイ
- Page 44 and 45: マイクロホン[ 正 面 ][ 左
- Page 46 and 47: s(k)Crosstalkn(k)R S(k)X P(k)X R(k)
- Page 48 and 49: する 隠 れマルコフモデル
- Page 50 and 51: 123ÙÖ ½ ¾º¾ ´º ½µ ´º
- Page 52 and 53: ÌÐ ½ ¿º¾ ÅÎÆÇÂ
- Page 54 and 55: ÁÒØÖÒØÓÒÐ ÓÒÖÒ ÓÒ Á
- Page 56 and 57: 例 えば、 同 一 時 間 差
- Page 58 and 59: いて、θの 絶 対 値 が 大
- Page 60 and 61: Fig.11 にこのシステムの 処
- Page 62 and 63: 5 , 2 EMIEWFig.1 EMIEW EMIEW 6 ,
- Page 64: 0 P th , (14) 4.4 3 4 4 1 , 3
- Page 67 and 68: 社 団 法 人 人 工 知 能 学
- Page 69 and 70: 3.1. 3.2. Fig. 3. The
- Page 71 and 72: 4.1. Fig. 5. The time co
- Page 73 and 74: 社 団 法 人 人 工 知 能 学
- Page 75 and 76: modal (m, ), whispery (w, ), aspir
- Page 77 and 78: Aperiodicity rate (APR)TLR (Time-La
- Page 79 and 80:
社 団 法 人 人 工 知 能 学
- Page 81 and 82:
, À, WDS-BF Ñ À℄·
- Page 83 and 84:
Table 1: Localization Error of A Si
- Page 85 and 86:
社 団 法 人 人 工 知 能 学
- Page 87 and 88:
を 行 い, 閾 値 処 理 を
- Page 89 and 90:
4. 音 声 対 話 制 御 実 験H
- Page 91 and 92:
社 団 法 人 人 工 知 能 学
- Page 93 and 94:
3 HLDAMLLR [3] (Useful Information
- Page 95 and 96:
Class 10degClass 20degClass 10degCl
- Page 97 and 98:
社 団 法 人 人 工 知 能 学
- Page 99 and 100:
赤 い 長 方 形 内 ). 以 下
- Page 101 and 102:
5.2 音 場 計 測 結 果(dB SPL)
- Page 103 and 104:
社 団 法 人 人 工 知 能 学
- Page 105 and 106:
a) 90 b) 90 MFMc) d) MFMe) 9
- Page 107 and 108:
(3) MFT Julius 7.1 Figure 4: SIG2