2. The Classical Single-degree-of-freedom System
2. The Classical Single-degree-of-freedom System
2. The Classical Single-degree-of-freedom System

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
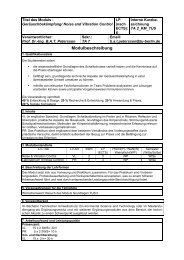
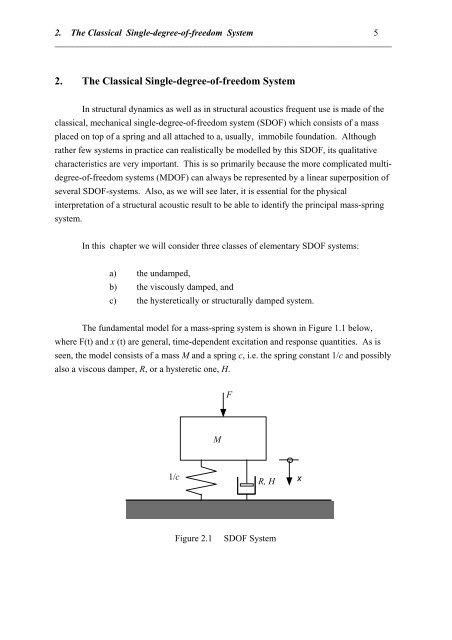
<strong>2.</strong> <strong>The</strong> <strong>Classical</strong> <strong>Single</strong>-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> <strong>System</strong> 5__________________________________________________________________________<strong>2.</strong> <strong>The</strong> <strong>Classical</strong> <strong>Single</strong>-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> <strong>System</strong>In structural dynamics as well as in structural acoustics frequent use is made <strong>of</strong> theclassical, mechanical single-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> system (SDOF) which consists <strong>of</strong> a massplaced on top <strong>of</strong> a spring and all attached to a, usually, immobile foundation. Althoughrather few systems in practice can realistically be modelled by this SDOF, its qualitativecharacteristics are very important. This is so primarily because the more complicated multi<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong>systems (MDOF) can always be represented by a linear superposition <strong>of</strong>several SDOF-systems. Also, as we will see later, it is essential for the physicalinterpretation <strong>of</strong> a structural acoustic result to be able to identify the principal mass-springsystem.In this chapter we will consider three classes <strong>of</strong> elementary SDOF systems:a) the undamped,b) the viscously damped, andc) the hysteretically or structurally damped system.<strong>The</strong> fundamental model for a mass-spring system is shown in Figure 1.1 below,where F(t) and x (t) are general, time-dependent excitation and response quantities. As isseen, the model consists <strong>of</strong> a mass M and a spring c, i.e. the spring constant 1/c and possiblyalso a viscous damper, R, or a hysteretic one, H.FM1/cR, HxFigure <strong>2.</strong>1SDOF <strong>System</strong>
<strong>2.</strong> <strong>The</strong> <strong>Classical</strong> <strong>Single</strong>-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> <strong>System</strong> 6__________________________________________________________________________<strong>2.</strong>1 <strong>The</strong> Undamped <strong>System</strong>In the homogeneous case, i.e. where an external force is missing, the governingequation can be written as:M &x + 1 c x = 0 (<strong>2.</strong>1)If we assume a solution on the form x(t) = x ˆ e iωtthen the condition,1c − ω 2 M = 0 (<strong>2.</strong>2)results. Since both 1/c and M are given, the equation furnishes a condition for ω which alsois the solution,ω o = 1/ cM (<strong>2.</strong>3)This solution, <strong>of</strong> course, is the natural frequency with which the system vibrates.Let us now consider the so-called frequency response function for the classicalsystem.We will consider an excitation <strong>of</strong> the formF(t) =)F e iωt (<strong>2.</strong>4)and assume, as before, the solution x(t) = xe ) iωt . Instead <strong>of</strong> the homogeneous differentialequation (<strong>2.</strong>1) we obtain now the inhomogeneous, i.e.M &x + 1 c x = F(t)(<strong>2.</strong>1a)and we can immediately write the frequency response function for the system asxF =c1 −ω 2 Mc= N(ω ) (<strong>2.</strong>5)
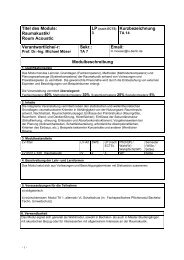
<strong>2.</strong> <strong>The</strong> <strong>Classical</strong> <strong>Single</strong>-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> <strong>System</strong> 8__________________________________________________________________________<strong>The</strong> damping ratio is the ratio <strong>of</strong> the actual viscous damping and the so-called criticaldamping, given by R o= 2 M / c . This means that the system has a displacement which canbe written as:x(t) = ˆx e −ω oβt e iω o1−β 2 t= ˆx e −αt e i ω o ′ t (<strong>2.</strong>11)It is seen from equation (<strong>2.</strong>11) that the vibration has a complex eigen-frequency <strong>of</strong> which theimaginary part describes the harmonic motion and the real, the amplitude decay, see Fig. <strong>2.</strong><strong>2.</strong>x(t)Re[eiω ο t]te -αtFigure <strong>2.</strong>2Free vibration <strong>of</strong> a damped SDOF systemWhen we consider the forced response, we assume a force function as above but proceeddirectly to the mobility representation, i.e.⎛iω M + R − iω ⎞⎝⎜ω 2 c⎠⎟ ˆv e iωt = ˆF e iωt (<strong>2.</strong>12)This leads to the mobility,Y(ω) =⎛iω M −⎝1(<strong>2.</strong>13)1 ⎞ω 2 c ⎠ + R
<strong>2.</strong> <strong>The</strong> <strong>Classical</strong> <strong>Single</strong>-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> <strong>System</strong> 9__________________________________________________________________________<strong>2.</strong>3 <strong>The</strong> Structurally Damped <strong>System</strong>A closer look at the behaviour <strong>of</strong> real structures shows that the viscous dampingmodel is not particularly representative. One finds <strong>of</strong>ten a frequency dependence <strong>of</strong> thedamping <strong>of</strong> real structures which cannot be reproduced by the viscous damper.An alternative is <strong>of</strong>fered by the hysteretic model, also denoted the structural dampingmodel. This not only has the advantage <strong>of</strong> reproducing the damping realistically but alsosimplifies the analysis <strong>of</strong> real systems. It must be emphasised, however, that the hystereticmodel can introduce difficulties if one attempts a complete analysis <strong>of</strong> the free vibrations <strong>of</strong> asystem. This is due to the fact that the model is based on the relaxation in a material (amemory function) which can produce non-causal effects in conjunction with free vibrations.We will therefore confine ourselves to handle the inhomogeneous case, i.e. where an externalforce is applied to the system. In such a case the governing equation can be written as:⎜⎛iωM +⎝( )1+ iη ⎞viωc ⎠ ˆ e iωt= ˆ F e iωt (<strong>2.</strong>14)where η is the so called loss-factor such that, in Figure <strong>2.</strong>1, H = η c .Accordingly the mobility is found to be given byY(ω ) =1⎛iω ⎜ M − 1 + iη ⎞⎝ ω 2 ⎟c ⎠(<strong>2.</strong>15)for the structurally damped system.In the discussion above we have, in fact, introduced a complex stiffness for which theimaginary part corresponds to the so-called loss factor <strong>of</strong> the system. This form <strong>of</strong> structuraldamping is denoted stiffness-proportional, structural damping and is frequently used instructural dynamics and structural acoustics. For a detailed examination <strong>of</strong> the concept <strong>of</strong>complex stiffness the reader is referred to [1] and [2].<strong>The</strong> expression for the mobility in eqn. (<strong>2.</strong>15) can be re-written asY(ω) =⎛iω M −⎝11 ⎞ω 2 c ⎠ + ηωc(<strong>2.</strong>16)
<strong>2.</strong> <strong>The</strong> <strong>Classical</strong> <strong>Single</strong>-<strong>degree</strong>-<strong>of</strong>-<strong>freedom</strong> <strong>System</strong> 10__________________________________________________________________________From a comparison <strong>of</strong> equations (<strong>2.</strong>13) and (<strong>2.</strong>16) it is seen that for the SDOF systemthe viscous damping and the structural damping can be made analogous if R = η/ωc.