Ground Penetrating Radar (GPR)
Ground Penetrating Radar (GPR)
Ground Penetrating Radar (GPR)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Ground</strong> <strong>Penetrating</strong> <strong>Radar</strong> (<strong>GPR</strong>) IET-<strong>Radar</strong> 2013<br />
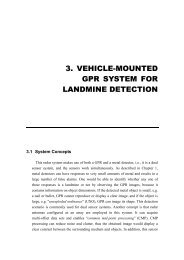
Problems of CS for <strong>GPR</strong><br />
Application to detection of buried<br />
Objects by <strong>GPR</strong><br />
1.Sampling Scheme<br />
2.Strong clutter<br />
100cm<br />
100cm<br />
Metal pipe 2<br />
Depth=75cm,L=150cm, φ=5cm<br />
end<br />
Start<br />
• Frequency span: 50MHz-<br />
1500MHz<br />
• Number of point: 137<br />
• Sampling point along spatial<br />
direction : 201<br />
• Start Position = 0m<br />
• Stop Position = 2.06m<br />
• Antenna Separation = 0.3 m.<br />
0<br />
0.1<br />
profilemHH<br />
x 10 -5<br />
16<br />
14<br />
Random Sampling Matrix<br />
Antenna<br />
Position<br />
Metal pipe1<br />
Depth=20cm,L=120cm,<br />
φ=2.2cm<br />
SlantRange [m]<br />
0.2<br />
0.3<br />
0.4<br />
0.5<br />
0.6<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
Frequency<br />
0.7<br />
0 0.5 1 1.5 2<br />
azimuth[m]<br />
SlantRange [m]<br />
profilemHH<br />
x 10 -5<br />
0<br />
16<br />
0.1<br />
14<br />
0.2<br />
12<br />
0.3<br />
10<br />
8<br />
0.4<br />
6<br />
0.5<br />
4<br />
0.6<br />
2<br />
0.7<br />
0 0.5 1 1.5 2<br />
azimuth[m]<br />
(a)<br />
SlantRange [m]<br />
SlantRange [m]<br />
outputCsBayesian<br />
0<br />
0.1<br />
0.2<br />
0.3<br />
0.4<br />
0.5<br />
0.6<br />
0.7<br />
0 0.5 1 1.5 2<br />
azimuth[m]<br />
outputCsOMP<br />
0<br />
0.1<br />
0.2<br />
0.3<br />
0.4<br />
0.5<br />
0.6<br />
0.7<br />
0 0.5 1 1.5 2<br />
azimuth[m]<br />
outputCsCoSaMP<br />
x 10 -4<br />
3<br />
2<br />
1<br />
0<br />
0<br />
0.1<br />
0.2<br />
0.3<br />
0.4<br />
0.5<br />
0.6<br />
0.7<br />
0 0.5 1 1.5 2<br />
azimuth[m]<br />
(b)<br />
Fourier Base (a) OMP, t = 100.05s (b) CoSaMP, t = 0.44s<br />
x 10 -4<br />
3<br />
2<br />
1<br />
0<br />
0<br />
0.1<br />
0.2<br />
0.3<br />
0.4<br />
0.5<br />
0.6<br />
0.7<br />
0 0.5<br />
outputCsBayesian<br />
1 1.5 2<br />
azimuth[m]<br />
SlantRange [m]<br />
(c) Bayesian, t = 27.68s (d) Modified Bayesian, t = 0.68s<br />
Reconstructed Image by CS<br />
SlantRange [m]<br />
x 10 -4<br />
3<br />
2<br />
1<br />
0<br />
x 10 -4<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
Summary- For better Imaging<br />
• <strong>GPR</strong> and GB-SAR technologies<br />
for Humanitarian activities and<br />
Disaster mitigation<br />
• Effective data acquisition with<br />
signal processing will improve<br />
the <strong>GPR</strong> image quality<br />
Motoyuki Sato (Tohoku University, Japan) 24