v2009.01.01 - Convex Optimization
v2009.01.01 - Convex Optimization v2009.01.01 - Convex Optimization
48 CHAPTER 2. CONVEX GEOMETRY T R 2 R 3 dim domT = dim R(T) Figure 14: Linear injective mapping Tx=Ax : R 2 →R 3 of Euclidean body remains two-dimensional under mapping representing skinny full-rank matrix A∈ R 3×2 ; two bodies are isomorphic by Definition 2.2.1.0.1. 2.2.1.1 Injective linear operators Injective mapping (transformation) means one-to-one mapping; synonymous with uniquely invertible linear mapping on Euclidean space. Linear injective mappings are fully characterized by lack of a nontrivial nullspace. 2.2.1.1.1 Definition. Isometric isomorphism. An isometric isomorphism of a vector space having a metric defined on it is a linear bijective mapping T that preserves distance; id est, for all x,y ∈dom T ‖Tx − Ty‖ = ‖x − y‖ (40) Then the isometric isomorphism T is a bijective isometry. Unitary linear operator Q : R k → R k representing orthogonal matrix Q∈ R k×k (B.5) is an isometric isomorphism; e.g., discrete Fourier transform via (747). Suppose T(X)= UXQ , for example. Then we say the Frobenius norm is orthogonally invariant; meaning, for X,Y ∈ R p×k and dimensionally compatible orthonormal matrix 2.13 U and orthogonal matrix Q ‖U(X −Y )Q‖ F = ‖X −Y ‖ F (41) 2.13 Any matrix U whose columns are orthonormal with respect to each other (U T U = I); these include the orthogonal matrices. △
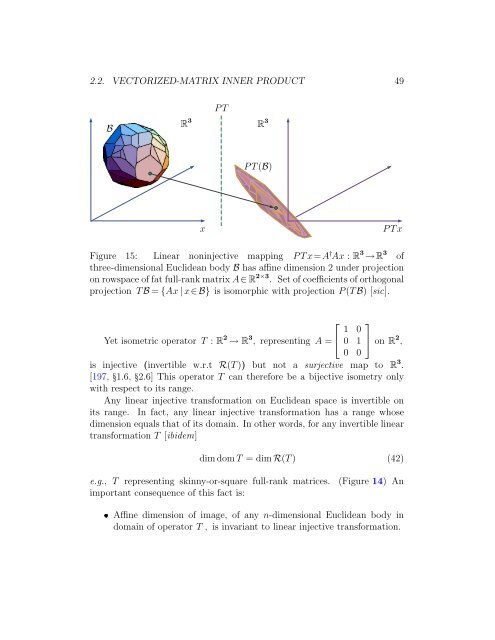
2.2. VECTORIZED-MATRIX INNER PRODUCT 49 B R 3 PT R 3 PT(B) x PTx Figure 15: Linear noninjective mapping PTx=A † Ax : R 3 →R 3 of three-dimensional Euclidean body B has affine dimension 2 under projection on rowspace of fat full-rank matrix A∈ R 2×3 . Set of coefficients of orthogonal projection T B = {Ax |x∈ B} is isomorphic with projection P(T B) [sic]. Yet isometric operator T : R 2 → R 3 , representing A = ⎣ ⎡ 1 0 0 1 0 0 ⎤ ⎦ on R 2 , is injective (invertible w.r.t R(T)) but not a surjective map to R 3 . [197,1.6,2.6] This operator T can therefore be a bijective isometry only with respect to its range. Any linear injective transformation on Euclidean space is invertible on its range. In fact, any linear injective transformation has a range whose dimension equals that of its domain. In other words, for any invertible linear transformation T [ibidem] dim domT = dim R(T) (42) e.g., T representing skinny-or-square full-rank matrices. (Figure 14) An important consequence of this fact is: Affine dimension of image, of any n-dimensional Euclidean body in domain of operator T , is invariant to linear injective transformation.
- Page 1 and 2: DATTORRO CONVEX OPTIMIZATION & EUCL
- Page 3 and 4: Convex Optimization & Euclidean Dis
- Page 5 and 6: for Jennie Columba ♦ Antonio ♦
- Page 7 and 8: Prelude The constant demands of my
- Page 9 and 10: Convex Optimization & Euclidean Dis
- Page 11 and 12: CONVEX OPTIMIZATION & EUCLIDEAN DIS
- Page 13 and 14: List of Figures 1 Overview 19 1 Ori
- Page 15 and 16: LIST OF FIGURES 15 3 Geometry of co
- Page 17 and 18: LIST OF FIGURES 17 126 Decomposing
- Page 19 and 20: Chapter 1 Overview Convex Optimizat
- Page 21 and 22: ˇx 4 ˇx 3 ˇx 2 Figure 2: Applica
- Page 23 and 24: 23 Figure 4: This coarsely discreti
- Page 25 and 26: ases (biorthogonal expansion). We e
- Page 27 and 28: 27 Figure 7: These bees construct a
- Page 29 and 30: that establish its membership to th
- Page 31 and 32: 31 appendices Provided so as to be
- Page 33 and 34: Chapter 2 Convex geometry Convexity
- Page 35 and 36: 2.1. CONVEX SET 35 2.1.2 linear ind
- Page 37 and 38: 2.1. CONVEX SET 37 2.1.6 empty set
- Page 39 and 40: 2.1. CONVEX SET 39 2.1.7.1 Line int
- Page 41 and 42: 2.1. CONVEX SET 41 (a) R 2 (b) R 3
- Page 43 and 44: 2.1. CONVEX SET 43 This theorem in
- Page 45 and 46: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 47: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 51 and 52: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 53 and 54: 2.2. VECTORIZED-MATRIX INNER PRODUC
- Page 55 and 56: 2.3. HULLS 55 Figure 16: Convex hul
- Page 57 and 58: 2.3. HULLS 57 The affine hull of tw
- Page 59 and 60: 2.3. HULLS 59 2.3.2 Convex hull The
- Page 61 and 62: 2.3. HULLS 61 In case k = N , the F
- Page 63 and 64: 2.3. HULLS 63 2.3.2.0.3 Exercise. C
- Page 65 and 66: 2.3. HULLS 65 Figure 20: A simplici
- Page 67 and 68: 2.4. HALFSPACE, HYPERPLANE 67 H + a
- Page 69 and 70: 2.4. HALFSPACE, HYPERPLANE 69 1 1
- Page 71 and 72: 2.4. HALFSPACE, HYPERPLANE 71 Recal
- Page 73 and 74: 2.4. HALFSPACE, HYPERPLANE 73 C H
- Page 75 and 76: 2.4. HALFSPACE, HYPERPLANE 75 2.4.2
- Page 77 and 78: 2.4. HALFSPACE, HYPERPLANE 77 (conf
- Page 79 and 80: 2.5. SUBSPACE REPRESENTATIONS 79 Ra
- Page 81 and 82: 2.5. SUBSPACE REPRESENTATIONS 81 If
- Page 83 and 84: 2.6. EXTREME, EXPOSED 83 2.6 Extrem
- Page 85 and 86: 2.6. EXTREME, EXPOSED 85 A B C D Fi
- Page 87 and 88: 2.7. CONES 87 2.6.1.3.1 Definition.
- Page 89 and 90: 2.7. CONES 89 0 Figure 30: Boundary
- Page 91 and 92: 2.7. CONES 91 2.7.2 Convex cone We
- Page 93 and 94: 2.7. CONES 93 Then a pointed closed
- Page 95 and 96: 2.7. CONES 95 A pointed closed conv
- Page 97 and 98: 2.8. CONE BOUNDARY 97 So the ray th
2.2. VECTORIZED-MATRIX INNER PRODUCT 49<br />
B<br />
R 3<br />
PT<br />
R 3<br />
PT(B)<br />
x<br />
PTx<br />
Figure 15: Linear noninjective mapping PTx=A † Ax : R 3 →R 3 of<br />
three-dimensional Euclidean body B has affine dimension 2 under projection<br />
on rowspace of fat full-rank matrix A∈ R 2×3 . Set of coefficients of orthogonal<br />
projection T B = {Ax |x∈ B} is isomorphic with projection P(T B) [sic].<br />
Yet isometric operator T : R 2 → R 3 , representing A = ⎣<br />
⎡<br />
1 0<br />
0 1<br />
0 0<br />
⎤<br />
⎦ on R 2 ,<br />
is injective (invertible w.r.t R(T)) but not a surjective map to R 3 .<br />
[197,1.6,2.6] This operator T can therefore be a bijective isometry only<br />
with respect to its range.<br />
Any linear injective transformation on Euclidean space is invertible on<br />
its range. In fact, any linear injective transformation has a range whose<br />
dimension equals that of its domain. In other words, for any invertible linear<br />
transformation T [ibidem]<br />
dim domT = dim R(T) (42)<br />
e.g., T representing skinny-or-square full-rank matrices. (Figure 14) An<br />
important consequence of this fact is:<br />
Affine dimension of image, of any n-dimensional Euclidean body in<br />
domain of operator T , is invariant to linear injective transformation.


