

RWRCCL - Roger Williams University
RWRCCL - Roger Williams University
RWRCCL - Roger Williams University

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Real-Time Linux Process<br />
Regular Linux Processes<br />
Joint Level Servo (JLS)<br />
Trajectory Control Task<br />
Planning Task<br />
1 ms signal<br />
Active State<br />
Start<br />
Start<br />
Spawn trajectory<br />
control task<br />
Suspend<br />
JLS<br />
yes<br />
suspend<br />
RTF<br />
Activate JLS<br />
Wait for<br />
data<br />
Issue motion<br />
commands<br />
Read robot position<br />
and status<br />
Linux I/O<br />
Space<br />
30 th<br />
signal<br />
Write RTF<br />
Control<br />
active<br />
no<br />
no<br />
Shared<br />
memory:<br />
encoders<br />
setpoints<br />
status<br />
puma_input read<br />
from shared mem<br />
Update time<br />
Check for tasks<br />
ready to run<br />
Run ready<br />
tasks<br />
puma_output write<br />
to shared mem<br />
Wait for<br />
command to<br />
complete<br />
Perform file<br />
and network IO<br />
Halt Trajectory<br />
Control Task<br />
End<br />
P-D Control<br />
Write robot DAC<br />
output and status<br />
setpoint<br />
RTF<br />
Update shared<br />
data structures<br />
Halt<br />
no<br />
RCCL/RCI<br />
shared data<br />
structures<br />
(HOW, RBT,<br />
TCB, etc.)<br />
End<br />
Activate<br />
Suspended State<br />
Suspend JLS<br />
End<br />
Data Path<br />
Control Path<br />
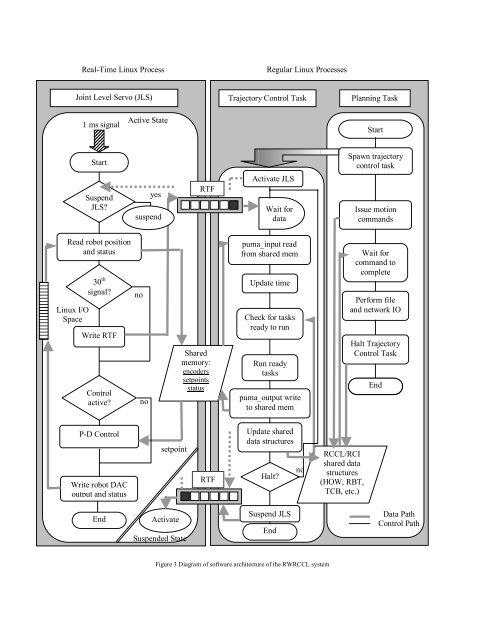
Figure 3 Diagram of software architecture of the <strong>RWRCCL</strong> system













