Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
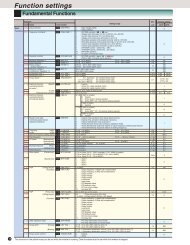
13. Function Code List<br />
Fcode<br />
Communication<br />
address<br />
485 Link<br />
number number<br />
Function code<br />
name<br />
You can change the setting of a function indicated by during operation.<br />
You should stop operation to change the setting of other functions.<br />
13-3<br />
PG LES VF SM<br />
f02 2h Operation method 0 to 1<br />
The method of operation is set.<br />
0 : KEYPAD operation (FWD or REV or STOP key)<br />
(LOCAL)<br />
1 : FWD or REV signal input (REMOTE)<br />
The change of REMOTE/LOCAL is possible also by<br />
RST+STOP key to the keypad panel. This<br />
operation corresponds to writing data of F02.<br />
42 o o o o o o o o<br />
f03 3h 51 h M1 Maximum speed M1 Maximum speed 50 to 1500 to 24000 r/min 0 o o x o o x o o<br />
f04 4h 52 h M1-Rated speed 50 to 24000 r/min 0 o o x o o x o o<br />
f05 5h 53 h M1-Rated voltage 80 to 999 V 0 o o x o o x o o<br />
f07 7h 54 h Acceleration time 1 0.01 to 5.00 to 99.99s<br />
100.0 to 999.9s<br />
1000 to 3600s<br />
f08 8h 55 h Deceleration time 1 0.01 to 5.00 to 99.99s<br />
100.0 to 999.9s<br />
1000 to 3600s<br />
f10 Ah 56 h M1 Electronic<br />
thermal overload<br />
relay<br />
M1 Electronic thermal<br />
overload relay (Select)<br />
f11 Bh 57 h M1 Electronic thermal<br />
overload relay (Level)<br />
f12 Ch 58 h M1 Electronic thermal<br />
overload relay (Thermal<br />
time constant)<br />
f14 Eh Restart mode after<br />
momentary power<br />
failure<br />
f17 11h Gain (terminal 12<br />
input)<br />
f18 12h Bias (terminal 12<br />
input)<br />
0 to 2<br />
The motor overheating protection operates by using<br />
NTC thermistor with the motor only for VG.<br />
In this case, please make setting F10 Electronic<br />
thermal "Inactive".<br />
0 : Inactive (When you use the motor only for VG)<br />
1 : Active (for 4-pole standard motor, with selfcooling<br />
fan)<br />
2 : Active (for Inverter motor, with separate cooling<br />
fan)<br />
0.01 to 99.99A<br />
100.0 to 999.9A<br />
1000 to 2000A<br />
13 o o o o o o o o<br />
13 o o o o o o o o<br />
85 o o x o o x o o<br />
13 o o x o o x o o<br />
0.5 to 75.0 min 2 o o x o o x o o<br />
0 to 5<br />
0 : Inactive (Trip and alarm when power failure<br />
occurs.)<br />
1 : Inactive (Trip, and alarm when power recovers.)<br />
2 : Inactive (Deceleration to stop, and trip and<br />
alarm.)<br />
3 : Active (Smooth recovery by continuous<br />
operation mode)<br />
4 : Active (Momentarily stops and restarts at speed<br />
on power failure)<br />
5 : Active (Momentarily stops and restarts at<br />
starting speed)<br />
0 o o o o o o o o<br />
0.0 to 100 to 200.0 % 2 o o o o o o o o<br />
-24000 to 0 to 24000 r/min 5 o o o o o o o x<br />
f20 14h 59 h DC brake (Starting DC brake (Starting 0 to 3600 r/min 0 o o o o o o x o<br />
speed)<br />
speed)<br />
f21 15h 5A h DC brake (Braking level) 0 to 100 % 16 o o o o o o x o<br />
f22 16h 5B h DC brake (Braking time) 0.0 to 30.0 s<br />
0.0 : (Inactive)<br />
0.1 to 30.0 s<br />
f23 17h 5C h Starting speed<br />
(Speed)<br />
f24 18h 5D h Starting speed<br />
(Holding time)<br />
f26 1Ah 5E h Motor sound<br />
(Carrier Freq.)<br />
f27 1Bh 5F h Motor sound (Sound<br />
tone)<br />
f36 24h 30RY operation<br />
mode<br />
Function directory name<br />
2 o o o o o o x o<br />
0.0 to 150.0 r/min<br />
(The frequency is limited so as not to become<br />
0.1Hz or less. (When using sensoless or VF<br />
control))<br />
2 o o o o o o o o<br />
0.00 to 10.00 s 3 o o o o o o o o<br />
0.75 to 7 to 15 kHz 10 o o o o o o o o<br />
0 to 3<br />
0 : level 0<br />
1 : level 1<br />
2 : level 2<br />
3 : level 3<br />
0 to 1<br />
0 : The relay(30) exites on trip mode.<br />
1 : The relay(30) exites on normal mode.<br />
f37 25h 60 h Stop speed (Level) Stop speed (Level) 0.0 to 10.0 to 150.0 r/min<br />
(The frequency is limited so as not to become<br />
0.1Hz or less. (When using sensoless or VF<br />
f38 26h 61 h Stop speed (Detection<br />
method)<br />
Setting range<br />
0 to 1<br />
0 : Reference value<br />
1 : Detected value<br />
It is fixed 0 to use the V/F control.<br />
Type<br />
Copy<br />
Save all<br />
Initialization<br />
Control type: Available/<br />
Not available<br />
Lifting<br />
machine<br />
0 o o o o o o o o<br />
43 o o o o o o o o<br />
2 o o o o o o o o<br />
90 o o o o o x o o<br />
Underline indicates a factory setting.