A Self-Organizing Power System Stabilizer using ... - IEEE Xplore
A Self-Organizing Power System Stabilizer using ... - IEEE Xplore
A Self-Organizing Power System Stabilizer using ... - IEEE Xplore

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
441<br />
[pu*0.001]<br />
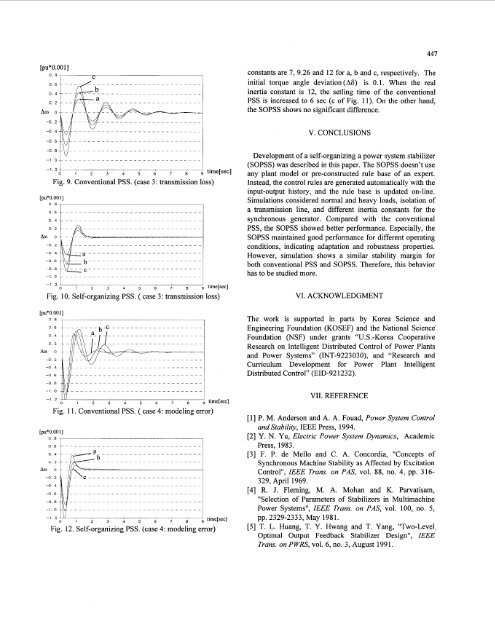
constants are 7, 9.26 and 12 for a, b and c, respectively. The<br />
initial torque angle deviation(A6) is 0.1. When the real<br />
inertia constant is 12, the setling time of the conventional<br />
PSS is increased to 6 sec (c of Fig. 11). On the other hand,<br />
the SOPSS shows no significant difference.<br />
V. CONCLUSIONS<br />
Development of a self-organizing a power system stabilizer<br />
(SOPSS) was described in this paper. The SOPSS doesn't use<br />
any plant model or pre-constructed rule base of an expert.<br />
Instead, the control rules are generated automatically with the<br />
input-output history, and the rule base is updated on-line.<br />
Simulations considered normal and heavy loads, isolation of<br />
a transmission line, and different inertia constants for the<br />
synchronous generator. Compared with the conventional<br />
PSS, the SOPSS showed better performance. Especially, the<br />
SOPSS maintained good performance for different operating<br />
conditions, indicating adaptation and robustness properties.<br />
However, simulation shows a similar stability margin for<br />
both conventional PSS and SOPSS. Therefore, this behavior<br />
has to be studied more.<br />
-l. k i i i i i i i i d time[secl<br />
Fig. 10. <strong>Self</strong>-organizing PSS. ( case 3: transmission loss)<br />
VI. ACKNOWLEDGMENT<br />
[pu*o.001]<br />
0. 8<br />
0.<br />
0.<br />
0.<br />
Am<br />
-0.<br />
-0.<br />
I<br />
The work is supported in parts by Korea Science and<br />
Engineering Foundation (KOSEF) and the National Science'<br />
Foundation (NSF) under grants "U.S.-Korea Cooperative<br />
Research on Intelligent Distributed Control of <strong>Power</strong> Plants<br />
and <strong>Power</strong> <strong>System</strong>s" (INT-9223030), and "Research and<br />
Curriculum Development for <strong>Power</strong> Plant Intelligent<br />
Distributed Control" (EID-92 1232).<br />
-1. 2<br />
[pu*0.001]<br />
0.8<br />
-1. 2<br />
Fig. 1 1. Conventional PSS. ( case 4: modeling error)<br />
Fig. 12. <strong>Self</strong>-organizing PSS. (case 4: modeling error)<br />
I<br />
VII. REFERENCE<br />
[l] P. M. Anderson and A. A. Fouad, <strong>Power</strong> <strong>System</strong> Control<br />
and Stability, <strong>IEEE</strong> Press, 1994.<br />
[2] Y. N. Yu, Electric <strong>Power</strong> <strong>System</strong> Dynamics, Academic<br />
Press, 1983.<br />
[3] F. P. de Mello and C. A. Concordia, "Concepts of<br />
Synchronous Machine Stability as Affected by Excitation<br />
Control", <strong>IEEE</strong> Trans. on PAS, vol. 88, no. 4, pp. 316-<br />
329, April 1969.<br />
[4] R. J. Fleming, M. A. Mohan and K. Parvatisam,<br />
"Selection of Parameters of <strong>Stabilizer</strong>s in Multimachine<br />
<strong>Power</strong> <strong>System</strong>s", <strong>IEEE</strong> Trans. on PAS, vol. 100, no. 5,<br />
pp. 2329-2333, May 1981.<br />
[5] T. L. Huang, T. Y. Hwang and T. Yang, "Two-Level.<br />
Optimal Output Feedback <strong>Stabilizer</strong> Design", <strong>IEEE</strong><br />
Trans. on PWRS, vol. 6, no. 3, August 1991.