9. Statistical Energy Analysis (SEA)
9. Statistical Energy Analysis (SEA)
9. Statistical Energy Analysis (SEA)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 80<br />
_____________________________________________________________________________<br />
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>)<br />
<strong>9.</strong>1 Introduction<br />
In this chapter an introduction to a framework for the analysis of the dynamics of complex,<br />
built-up structural and fluid systems will be outlined. This framework denoted <strong>Statistical</strong><br />
<strong>Energy</strong> <strong>Analysis</strong> was developed in the 1960's, to a great extent to clarify and handle structural<br />
acoustic problems in conjunction with space-crafts. Since then the formalism used within this<br />
framework has been successfully applied in many other areas such as ships, buildings, aircrafts<br />
and cars.<br />
Perhaps the most prominent text on this topic is by Lyon [1] and gives a valuable<br />
description of the framework by explaining each word in its name. The explanations are cited<br />
here:<br />
"<strong>Statistical</strong> emphasizes that the systems being studied are presumed to be drawn<br />
from statistical populations having known distributions of their dynamical<br />
parameters. <strong>Energy</strong> denotes the primary variable of interest. Other dynamic<br />
variables such as displacement, pressure, etc., are found from the energy of<br />
vibrations. The term <strong>Analysis</strong> is used to emphasize that <strong>SEA</strong> is a framework of<br />
study rather than a particular technique."<br />
Hence, the "statistical philosophy" introduced in <strong>SEA</strong> must be seen as a compilation of methods<br />
or ways to study structural acoustic questions where basic knowledge must not be set aside for a<br />
routine scheme.<br />
Apart from the textbook mentioned above, a few other references can be given which either<br />
exemplify the use of <strong>SEA</strong> in engineering practice [2] or bring out the limitations for the<br />
framework [3]. A rather comprehensive and advanced discussion of <strong>SEA</strong> is given in [4] where<br />
the objects under study are ships.<br />
The natural area of operation for <strong>SEA</strong> is the analysis of the high frequency behaviour of<br />
complex structures. Usually the analysis involves coupling between two or more, simply<br />
identifiable but complex structural and/or fluid systems. In this context, high frequencies refer<br />
to the frequency region where the system under study possesses a large number of<br />
eigenfrequencies in a limited frequency band. This means that if the system under study is<br />
excited by a force which has components at all frequencies - a broad band, white noise force - a<br />
lot of resonances will occur within the frequency band.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 81<br />
_____________________________________________________________________________<br />
It is of course justified to ask why introduce a statistical point of view for the analysis of<br />
the dynamics of systems that are normally considered to be rather deterministic. The answer<br />
lies in the many problems relating to the application of numerical or semi-analytical methods<br />
(e.g. FEM) for complex systems having a large number of eigenfrequencies in the frequency<br />
range of interest. Among those problems we may list:<br />
- uncertainties in the input data (e.g. boundary conditions)<br />
- unknown excitation (e.g. excitation points are not specified)<br />
- variations in the fabrication (e.g. two cars of the same type will not be exactly the same)<br />
Since the designer often wants to make predictions early at the design stage when details of the<br />
structural configuration are missing or incomplete, a simple "macroscopic" analysis is<br />
motivated. One of the advantages with <strong>SEA</strong> is namely the representation of the structural and<br />
fluid systems. These are represented by geometrical and material properties from which<br />
characteristics in the dynamic state such as:<br />
average modal densities<br />
n(ω ) = lim<br />
Δω →0<br />
N( ω + Δω ) − N( ω)<br />
Δω<br />
(<strong>9.</strong>1)<br />
where N(ω ) is the number of eigenfrequencies up to the angular frequency ω ,<br />
average modal damping,<br />
η = W d<br />
2πV<br />
(<strong>9.</strong>2)<br />
where W d is the energy lost during one period of oscillation and V is the peak value of the<br />
potential energy during that period, these quantities being based on the average modal energies,<br />
and<br />
average coupling data<br />
can be derived. The coupling between structural and/or fluid members, subsystems, of the<br />
system leads to energy flows in between them in order to maintain an energy balance in the<br />
presence of dissipative losses. In turn, the dynamic field variables of interest to the engineer are<br />
obtained as spatial and temporal averages which are directly related to the total energy of the<br />
subsystem.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 82<br />
_____________________________________________________________________________<br />
The most obvious disadvantage with <strong>SEA</strong> is that the energy quantities obtained for the<br />
different subsystems are statistical estimates of the true energy quantities and accordingly<br />
involve some uncertainty. Usually the uncertainty will be less pronounced at high frequencies<br />
where the number of resonant eigenfrequencies included is high for all subsystems. This means<br />
that there will be a low frequency limit in practice but no principle limitation exists as long as<br />
the subsystems have resonant eigenfrequencies<br />
The subsystems in <strong>SEA</strong> are presumed to be finite, linear, elastic structures or fluid cavities<br />
which can be described by their uncoupled eigenfrequencies, eigenfunctions (mode shapes) and<br />
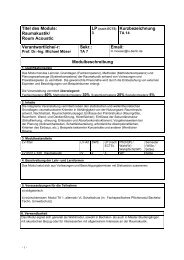
losses. It is assumed that each eigenfunction can be modelled by a simple oscillator (one may<br />
here think of a mass-spring system) and that the interaction between two multi-modal<br />
subsystems can be represented by the coupling between two sets of oscillators, see Figure <strong>9.</strong>1.<br />
System 1<br />
System 2<br />
System 1<br />
System 2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
α<br />
σ<br />
α<br />
σ<br />
N 1<br />
N 2<br />
N 1<br />
N 2<br />
Π σα<br />
Total energy flow<br />
Π 12<br />
Figure <strong>9.</strong>1 Illustration of interaction and coupling between multi-modal systems. After [1]<br />
No attempt has been made in this chapter to fully compile all the theoretical considerations<br />
underlying <strong>SEA</strong> but the most necessary fundamentals required for the understanding of the<br />
procedure in working with <strong>SEA</strong> will be given.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 83<br />
_____________________________________________________________________________<br />
<strong>9.</strong>2 Fundamentals of Coupled Subsystems<br />
In <strong>SEA</strong> the complex system under study may be subdivided into a number of subsystems.<br />
Some can be directly excited by sources whereas others are indirectly excited through different<br />
couplings (junctions, discontinuities, transfer from one medium to another) to the former ones.<br />
Accordingly, a basic question in <strong>SEA</strong> is how to subdivide the system into subsystems. This<br />
division can intuitively be made at the boundaries of the different structural and fluid members.<br />
However, it is very important to bear in mind that for complex systems there will be different<br />
wave types present which realize different groups of modes. This implies that in addition to the<br />
previously mentioned subsystems we must subdivide the system with respect to these groups of<br />
modes. Hence, of a physical structural element we may have to form two or more sub-systems<br />
where one involves only flexural motion and the others different in-plane motions.<br />
The interaction between two simple oscillators which are assumed to be linear and coupled<br />
by linear, non-dissipative elements (no energy lost at the connecting boundaries) constitute the<br />
fundamental model from which some important theorems in <strong>SEA</strong> can be deduced. To<br />
summarize it is appropriate to start from the basic equation<br />
Π ′ 21 = B(E 1 − E 2 ) . (<strong>9.</strong>3)<br />
Consider the coupled system in Figure <strong>9.</strong>1 if the energies in the two subsystems are E 1 and<br />
E 2 then the net energy flow between them is found from eqn. (<strong>9.</strong>3) above. In this equation B is<br />
a function of the coupling strength. This coupling is solely governed by the properties of the<br />
subsystems and the coupling elements.<br />
From this equation we may state:<br />
• the energy flow is proportional to the actual vibrational energies of the two subsystems<br />
• the coupling function or proportionality is positive, definite and symmetric in the system<br />
parameters therefore the system is reciprocal and the energy flows from the subsystem with<br />
the higher energy to the one with the lower energy<br />
• if only one subsystem is directly excited the highest possible energy for the indirectly driven<br />
subsystem is that of the first.<br />
The analogy with thermodynamics is not very far away. Thus, the picture with an energy flow<br />
between a hot body and a cold one in contact may be helpful although it should not be taken too<br />
literally.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 84<br />
_____________________________________________________________________________<br />
<strong>9.</strong>3 <strong>Energy</strong> Flow Between Multi-modal Subsystems<br />
Consider again the model in Figure <strong>9.</strong>1. The basic assumptions when <strong>SEA</strong> is used in<br />
conjunction with this coupling problem can be cited from [1]:<br />
"1. Each mode is assumed to have a natural frequency ω iα that is uniformly<br />
probable over the frequency interval Δω . This means that each subsystem is a<br />
member of a population of systems that are generally physically similar, but<br />
different enough to have randomly distributed parameters. The assumption is<br />
based on the fact that nominally identical structures or acoustical spaces will<br />
have uncertainties in modal parameter, particularly at higher frequencies.<br />
2. We assume that every mode in a subsystem is equally energetic and that its<br />
amplitudes<br />
Y iα (t ) = ∫ ρ i y i ψ iα dx i / M<br />
are incoherent, that is,<br />
< Y iα Y iβ > t = δ αβ < Y iα 2 > .<br />
This assumption requires that we select mode groups for which this should be<br />
approximately correct, at least, and is an important guide to proper <strong>SEA</strong><br />
modeling. It also implies that the excitation functions L i are drawn from<br />
random populations of functions that have certain similarities (such as equal<br />
frequency and wave number spectra) but are individually incoherent. "<br />
(In the expressions cited the following notation is used:<br />
ρ i is the density distribution of subsystem i<br />
y i is the physical response quantity for subsystem i<br />
ψ iα is the eigenfunction associated with the α th eigenfrequency of subsystem i<br />
x i is the local spatial co-ordinate for subsystem i<br />
M i is the total mass of subsystem i<br />
Y iα is the modal response quantity (generalised response) for mode α and<br />
subsystem i<br />
< > t denotes temporal average<br />
δ Kroneckar delta )
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 85<br />
_____________________________________________________________________________<br />
Now, based upon the conditions cited the energy flow from system 1 to system 2 in Figure<br />
<strong>9.</strong>1 can be derived in analogy with eqn. (<strong>9.</strong>3) if an average value for the many, generally<br />
different coupling parameters B σα replaces B and E 1 and E 2 are replaced by the respective<br />
average modal energies E 1 and E 2<br />
m m<br />
Π ′ 21 = < B σα > N 1 N 2 ( E 1 − E2 ) . (<strong>9.</strong>4)<br />
In the above equation < B σα > denotes the average modal coupling and N 1 , N 2 the number of<br />
modes (eigenfunctions) in the two subsystems respectively.<br />
The average modal energies are defined by<br />
E i m =<br />
E i<br />
tot<br />
n( f ) Δf<br />
(<strong>9.</strong>5)<br />
where n(f) is given by eqn. (<strong>9.</strong>1) and E i tot is the total vibrational energy of subsystem i.<br />
Since the energy flow between the subsystems, from one specific subsystem seen, can be<br />
interpreted as a loss of energy, the formalism can be developed by defining a coupling loss<br />
factor as<br />
η 21 = < B σα > N 2 / ω (<strong>9.</strong>6a)<br />
which says that the loss from system 1 is proportional to the number of modes in system 2, i.e.<br />
how many energy reservoirs there are available in system 2. Since the complete system is<br />
reciprocal we could equally well have defined<br />
η 12 = < B σα > N 1 / ω (<strong>9.</strong>6b)<br />
and from the two relations in (<strong>9.</strong>6) the reciprocity relation<br />
η 12 N 2 = η 21 N 1 (<strong>9.</strong>7)<br />
can be deduced.<br />
Introducing eqn. (<strong>9.</strong>6a) in eqn. (<strong>9.</strong>4) yields<br />
Π ′ 21 = ω η 21 N 1 E m m<br />
( 1 − E 2 ) (<strong>9.</strong>8)
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 86<br />
_____________________________________________________________________________<br />
which in turn shows that the energy flow will be from the subsystem with the higher average<br />
modal energy tothe one with the lower.<br />
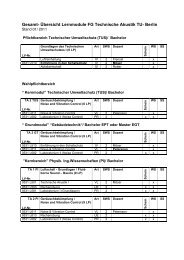
Equation (<strong>9.</strong>8) constitutes the fundamental block in any <strong>SEA</strong> calculation. The diagram in<br />
Figure <strong>9.</strong>2 symbolizes the general situation in which eqn. (<strong>9.</strong>8) is to be applied.<br />
Π<br />
Π<br />
1, in 2, in<br />
E 1, tot<br />
Π<br />
21<br />
E 2, tot<br />
N 1<br />
N 2<br />
Π<br />
Π<br />
1, diss 2, diss<br />
Figure <strong>9.</strong>2<br />
Illustration of energy flows to, form and in between two coupled subsystems<br />
From the diagram in Figure <strong>9.</strong>2 one may see that not only does a flow between the two<br />
subsystems exist but also there may be both independent in-flow and out-flow, to and from each<br />
subsystem. Hence the average energy quantities sought for the prediction of the average<br />
response of a subsystem must be solved from a system of linear equations.<br />
7.3 <strong>SEA</strong> Modelling<br />
A number of questions are raised before and during the subdivision of a physical system<br />
into different, coupled subsystems. A basic feature of a subsystem must be that its response is<br />
determined by resonant modes. It is consequently not meaningful nor appropriate to apply an<br />
<strong>SEA</strong> approach to a system (or subsystem) below its fundamental eigenfrequency. However,<br />
coupling via non-resonant elements may be admitted.<br />
The sources of input power and the groups of eigenfunctions to which they are coupled<br />
must be identified. Moreover, the different groups of eigenfunctions with similar properties<br />
must be selected and represented by separate subsystems. As mentioned previously, these<br />
considerations usually mean that one physical part of the system must be represented by several<br />
<strong>SEA</strong> subsystems.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 87<br />
_____________________________________________________________________________<br />
The junctions between the subsystems must be assigned correct coupling loss factors. Very<br />
often the junctions are chosen to coincide with the geometrical boundaries of the physical parts<br />
but this is not necessary. A comprehensive discussion of the considerations involved in <strong>SEA</strong><br />
modelling can be found in [4] where also some valuable hints on how to practically proceed<br />
from a physical object to an <strong>SEA</strong> model are outlined.<br />
<strong>9.</strong>4 The Average Modal Density<br />
The average modal density was introduced in section <strong>9.</strong>1. This quantity will usually be<br />
estimated with sufficient accuracy from closed form expressions for elementary fluid and<br />
structural elements (cf. ch. 6) such as beams, plates, cylinders, cavities and so forth.<br />
Compilations of such expressions are found in many text books, e.g. [1] and [5]. It must be<br />
emphasized however that the closed form expressions normally are equivalent to the asymptote<br />
found at high frequencies. Therefore, the actual modal density, in the low and mid-frequency<br />
regions, may be different from the one predicted. At low frequencies where the number of<br />
modes in the frequency interval (band) of interest is small the estimates can be improved by<br />
measurements on the system if a sample of it exists and methods for such investigations are<br />
sketched in [1].<br />
If in eqn. (<strong>9.</strong>7) the average modal density is introduced the reciprocity relation becomes<br />
η 21 n 1 = η 12 n 2<br />
(<strong>9.</strong>9a)<br />
the basic energy flow can be rewritten as<br />
⎛<br />
m<br />
Π ′ 21 = ω η 21 Δω n 1 E η 1 −<br />
12<br />
⎜ n2<br />
⎝<br />
η 21<br />
E 2<br />
m<br />
⎞<br />
⎟ (<strong>9.</strong>9)<br />
⎠<br />
<strong>9.</strong>5 The Dissipation<br />
In addition to the energy flow due to the coupling between subsystems also the energy flow<br />
out from the system under consideration - the dissipation - must be taken into account. This<br />
energy loss can be due to e.g. internal losses (transformation into heat) or to radiation or<br />
coupling to connected systems not included in the <strong>SEA</strong>-model. The dissipation is represented<br />
by an internal loss factor, η ii , for each subsystem i.<br />
Unfortunately, reliable prediction methods for the dissipation are not available to-day and<br />
the internal loss factors therefore either must be measured or rely upon experience. Theories<br />
exist for different kinds of mechanisms leading to losses but so far they are only applicable
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 88<br />
_____________________________________________________________________________<br />
under rather specific and restrictive conditions. Moreover, experience may give the right order<br />
of magnitude in an overall sense but frequency trends are hard to foresee. This means that<br />
measurements rather often is what remains and a few experimental techniques are described in<br />
[4] and [5]. One may therefore conclude that the assignment of dissipative, internal loss factors<br />
to subsystems is a demanding task and further research in this area is desirable.<br />
<strong>9.</strong>6 The Coupling<br />
The description of the coupling is as shown above formalised by using coupling loss<br />
factors. Often these loss factors can be estimated theoretically whereby the duality of junction<br />
properties for infinite subsystems and statistical ensembles of finite subsystems is utilized [1].<br />
In principle we may distinguish between three different types of junctions:<br />
• fluid cavity to fluid cavity (e.g. coupling through a partition wall)<br />
• structural element to fluid cavity (e.g. panel to cavity)<br />
• structural element to structural element (e.g. wall to floor).<br />
In the following these three types will be discussed in greater detail.<br />
<strong>9.</strong>6.1 Coupling Between Fluid Spaces<br />
It is hereby assumed that a transmission efficiency, τ, can be found for the interface<br />
between the two spaces. In the case that the two fluid spaces are separated by a partitioning<br />
wall the transmission efficiency is simply found from the sound reduction index<br />
R = 10 log (1 τ)<br />
commonly used in building acoustics.<br />
Using the transmission efficiency the coupling loss factor can be derived to be<br />
η 21 = τ c 1S<br />
8πfV 1<br />
(<strong>9.</strong>10)<br />
where c 1 is the longitudinal wave speed of the fluid, S is the area of the partition and V 1 the<br />
volume of the sending space.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 89<br />
_____________________________________________________________________________<br />
It is thus found from eqn. (<strong>9.</strong>10) that the coupling loss factor increases with an increased<br />
transmission efficiency of the interface and with its area whereas an increase in the volume of<br />
the sending space reduces the coupling loss factor.<br />
<strong>9.</strong>6.2 Coupling Between a Structural Element and a Fluid Space<br />
For such a junction between two subsystems the coupling loss factor is related to the real<br />
part of the impedance which the structure sees looking into the fluid space. This leads to the<br />
ratio<br />
η fs = Re[Z]<br />
ω M s<br />
(<strong>9.</strong>11)<br />
which hence implies a comparison of the input fluid impedance and the mass impedance of the<br />
structure.<br />
For the specific case of a surface coupling eqn. (<strong>9.</strong>11) can be explicitely written as<br />
η fs = 2 ρ c f σ<br />
ω m<br />
(<strong>9.</strong>12)<br />
where the radiation efficiency, σ, of the structure has been introduced. ρ denotes the density of<br />
the fluid and m is the structural mass per unit area.<br />
From eqns. (<strong>9.</strong>11) or (<strong>9.</strong>12) it is seen that the coupling loss factor for the energy flow from<br />
the structure to the fluid increases with an increasing input impedance or equivalently radiation<br />
efficiency and decreases with an increased structural mass.<br />
Theoretical expressions for the input impedance (often designated radiation impedance)<br />
and the radiation efficiency have been derived for a variety of structures in contact with air or<br />
water and is readily found in the acoustic literature.<br />
<strong>9.</strong>6.3 Coupling Between Structural Elements<br />
This type of coupling can be derived in a number of ways. The most appropriate manner<br />
depends on the specific junction but often use is made of the infinite systems, associated with<br />
the actual structural elements. The most frequent classes of structural coupling are point-like<br />
(contact areas of dimensions smaller than the wave-length of the governing wave), line- or striplike<br />
(one-dimensional coupling) and surface coupling.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 90<br />
_____________________________________________________________________________<br />
For point-like coupling the ordinary or effective mobilities of the structural elements can be<br />
used and compilations of ordinary point mobilities are given and referenced in chapters 6 and 8.<br />
With respect to line or strip connections the coupling loss factor can be derived from the<br />
transmission efficiencies related to the associated infinite systems [5]. Thereby the coupling<br />
loss factor is obtained from<br />
η 21 =<br />
c g1 L<br />
τ<br />
2 ω S 21 (<strong>9.</strong>13)<br />
1<br />
where τ 21 denotes the transmission efficiency from element 1 to element 2, c g1 is the group<br />
velocity for waves in element 1 (the group velocity introduced here is the velocity with which<br />
the power is transferred which generally is different from the phase speed, ordinary wave speed,<br />
for dispersive waves), S 1 the area of subsystem 1 and L the length of the line interface.<br />
One may thus note that the coupling increases with an increased line length, with an<br />
increased transmission efficiency but decreases with an increased area of the sending surface.<br />
Moreover, the reciprocity relation obtained for normal incidence, τ 12 = τ 21 , is not valid in the<br />
case of "random" incidence but is replaced by<br />
k 1 τ 21 = k 2 τ 12 (<strong>9.</strong>14)<br />
where k 1 and k 2 are the wave numbers of the two structural elements respectively.<br />
The coupling of, for instance, plates over surfaces generally is more cumbersome to handle.<br />
Theoretical studies of waves in layered media describe the features of this class of coupling but<br />
it is beyond the scope here to further expand on the pertinent results.<br />
<strong>9.</strong>7 External Source Input<br />
The origin of wave propagation or, in the <strong>SEA</strong> philosophy, energy flow is of course input<br />
from one or more external sources. This input is according to the structural acoustic process<br />
penetrated in chapter 8, transmission. From an <strong>SEA</strong> point of view one may therefore consider<br />
the input power as given although all the question marks relating to transmission are far from<br />
straightened out.<br />
One particular case of power input to a system on which <strong>SEA</strong> is to be applied, however,<br />
will be discussed here since it does not belong to transmission in a structural acoustic sense.<br />
This case is featured by a source within a fluid space. If the fluid under study is air, typical air-
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 91<br />
_____________________________________________________________________________<br />
borne sound sources are nowadays specified with respect to their air-borne sound power output.<br />
Commonly, the manufacturer already in product sheets state the acoustic power output which of<br />
course greatly facilitates the analyst's situation. In the work with <strong>SEA</strong> the external source input<br />
must not be considered as a problem.<br />
<strong>9.</strong>8 <strong>Energy</strong> Balance<br />
The energy balance for large systems has been extensively discussed in [4]. This section<br />
essentially recalls and summarizes the discussion therein although the notation used is different.<br />
The basic energy balance equation (<strong>9.</strong>8) is valid for two coupled, multi-modal systems<br />
when the underlying assumptions are fulfilled. The normal situation however, is that a lot more<br />
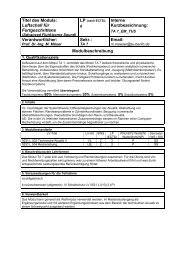
than two subsystems are involved. The block diagram in Figure <strong>9.</strong>3 illustrates a general<br />
situation.<br />
As is seen from the figure, the general case includes many external source inputs as well as<br />
dissipation from all subsystems.<br />
Intuitively, it seems to be a straight forward task to generalize the two-subsystem case to N<br />
subsystems and obtain a system of N linear equations and indeed there are no formal<br />
difficulties. There is however a physical implication that must be taken into account before<br />
doing so. This implication is rather clearly demonstrated by considering the system in Figure<br />
<strong>9.</strong>4.<br />
In the two-subsystem case previously discussed, e.g. the two horizontally connected plates<br />
in Figure <strong>9.</strong>4 with the vertical plate excluded, there is no ambiguity as to what is meant by the<br />
coupling loss factor. With respect to the three-plate system the quesiton arises: Should the rest<br />
of the system be connected or disconnected when one specific junctionis considered<br />
Obviously, it should make a difference when we are seeking the coupling loss factor at the L-<br />
junction if the horizontal plate consists of one or two elements (compare eqn. (<strong>9.</strong>11) with S 1<br />
being either the area of one or two plate elements). We may therefore conclude that in order to<br />
proceed straightforwardly from the two-subsystem case to that with N subsystems, the coupling<br />
losses at all junctions (connections between subsystems) must be small. This is equivalent to<br />
the prescription of weak coupling between the different subsystems. Consequently, the<br />
existence of adjoining subsystems must not markedly affect the properties of the eigenfunctions<br />
of a subsystem (in a statistical sense).<br />
At a first sight, the above-mentioned condition may seem rather drastic but comparisons<br />
made between <strong>SEA</strong> predictions and experimental results show that the condition of weak
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 92<br />
_____________________________________________________________________________<br />
coupling does not impose serious estimation errors if the complexity of the complete system is<br />
large. <strong>Statistical</strong>ly the latter finding is acceptable since for large complex systems a<br />
"randomization" of the interaction between subsystems will always take place.<br />
Π<br />
1, in<br />
Π<br />
2, in<br />
E 1, tot<br />
Π21<br />
E 2, tot<br />
N 1<br />
N 2<br />
Π<br />
Π<br />
1, diss<br />
Π<br />
2, diss<br />
Π<br />
13<br />
Π 23<br />
Π 3, in<br />
E 3, tot<br />
N 3<br />
Π N1<br />
N, in<br />
Π<br />
3, diss<br />
Π N3<br />
E N, tot<br />
N N<br />
Π<br />
N, diss<br />
Figure <strong>9.</strong>3 Block diagram of an <strong>SEA</strong> model with several subsystems. After [1]
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 93<br />
_____________________________________________________________________________<br />
Plate 3<br />
Plate 2<br />
Plate 1<br />
Figure <strong>9.</strong>4 A three plate-element system. From [4]<br />
For the specific case of two equal plates with no discontinuity in between, there is also no<br />
reason not to treat them as a single subsystem. Nevertheless, the condition of weak coupling<br />
discussed proves the statement that <strong>SEA</strong> is rather a compilation of methods where basic<br />
knowledge in structural acoustics is required for judging the applicability of the different<br />
assumptions made in an analysis.<br />
On the basis of the weak coupling condition being sufficiently well fulfilled, the<br />
generalization of the energy balance equation becomes<br />
in<br />
tot<br />
m<br />
⎧Π 1<br />
⎫ ⎡n 1<br />
η 1<br />
−n 2<br />
η 12<br />
L −n N<br />
η iN<br />
⎤ ⎧E 1<br />
⎫<br />
in<br />
⎢<br />
tot<br />
⎥<br />
m<br />
⎪Π 2 ⎪ −n<br />
⎨ ⎬ = ω ⎢ 1<br />
η 21<br />
n 2<br />
η 2<br />
M<br />
⎥ ⎪E 2 ⎪<br />
⎪ M⎪<br />
⎢ M O M ⎥<br />
⎨ ⎬<br />
in<br />
⎢<br />
⎩<br />
⎪Π N ⎭<br />
⎪<br />
tot<br />
⎥<br />
⎪ M⎪<br />
m<br />
⎣−n 1<br />
η N1<br />
L L −n N<br />
η NN ⎦ ⎩<br />
⎪E N ⎭<br />
⎪<br />
(<strong>9.</strong>15)<br />
where η i<br />
tot<br />
includes all the types of losses from a subsystem, i.e.<br />
η i<br />
tot<br />
N<br />
∑ ,<br />
j<br />
= η ii + η ji<br />
the out-flow from the i th subsystem.
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 94<br />
_____________________________________________________________________________<br />
The loss factor matrix is symmetric and positive definite ({x} t [A]{x} > 0; every {x})<br />
which means that the solution of eqn. (<strong>9.</strong>15) can be established by means of standard computer<br />
routines. If in addition some systematics is introduced in the numbering of the subsystems the<br />
loss factor matrix can be made banded (the elements are clustered around the main diagonal)<br />
which greatly facilitate the numerical handling.<br />
In this section it is appropriate with a warning concerning the fact that some confusion<br />
exists in the literature with respect to the concept of weak coupling. Sometimes, the concept<br />
weak coupling is used in connection with the assumption<br />
η ji = E i / M i (<strong>9.</strong>16)<br />
where M i is the total mass of the i th subsystem.<br />
Similarly for a fluid space or subsystem the response estimates are given by the spatial<br />
average, mean square pressure as<br />
< p ˜<br />
2 Eiρ i c<br />
2<br />
i<br />
> =<br />
i<br />
Vi<br />
(<strong>9.</strong>17)<br />
From eqns. (<strong>9.</strong>16) and (<strong>9.</strong>17) it is evident that no information concerning the response field<br />
within a subsystem is obtained. Rather, the distribution of the response among the subsystems<br />
is revealed. It is also very important to bear in mind the explanations of the name <strong>SEA</strong>, given in
<strong>9.</strong> <strong>Statistical</strong> <strong>Energy</strong> <strong>Analysis</strong> (<strong>SEA</strong>) 95<br />
_____________________________________________________________________________<br />
section <strong>9.</strong>1, when interpreting the results. Thus, the predictions finally obtained through eqns.<br />
(<strong>9.</strong>16) and (<strong>9.</strong>17) are merely statistical estimates with an inevitable variance and not exact<br />
results from a calculation regarding a specified physical system. With these underlinings in<br />
mind the use of <strong>SEA</strong> has proved very valuable in most branches of noise and vibration control.<br />
<strong>9.</strong>10 References<br />
[1] Lyon, R.H. 1975. MIT Press. <strong>Statistical</strong> energy analysis of dynamical systems.<br />
[2] Maidanik, G. 1977. Journal of Sound and Vibration, 52, 171- . Some elements in<br />
statistical energy analysis.<br />
[3] Fahy, F. 1974. Shock and Vibration Digest. <strong>Statistical</strong> energy analysis: A critical<br />
review.<br />
[4] Plunt, J. 1980. Chalmers University of Technology, Dept. of Engineering Acoustics,<br />
Report 80-07. Methods for predicting noise levels in ships.<br />
[5] Cremer, L., Heckl, M. and Petersson, B. 2005. Springer Verlag, Berlin. Structure-borne<br />
sound.