Interface Specifications - Standard ICs
Interface Specifications - Standard ICs
Interface Specifications - Standard ICs

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Copyright<br />
©2006 Leadtek Research Inc. All rights reserved. No part of this publication may be reproduced, stored in a retrieval<br />
system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise,<br />
without the prior written consent of Leadtek Research Inc.<br />
Trademarks<br />
Leadtek and the Leadtek logo are registered trademarks of Leadtek Research Inc.<br />
All other trademarks are the property of their respective owners.<br />
Changes<br />
The material in this document is for information only and is subject to change without notice. While reasonable efforts<br />
have been made in the preparation of this document to assure its accuracy, Leadtek Research assumes no liability<br />
resulting from errors or omissions in this document, or from the use of the information contained herein.<br />
Leadtek reserves the right to make changes in the product design without reservation and without notification to its<br />
users.<br />
THE DOCUMENT IS PROVIDED BY LEADTEK "AS IS", AND ANY EXPRESS OR IMPLIED WARRANTIES,<br />
INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND<br />
FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL LEADTEK BE LIABLE<br />
FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES<br />
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF<br />
USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY<br />
OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR<br />
OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS DOCUMENT, EVEN IF ADVISED OF THE<br />
POSSIBILITY OF SUCH DAMAGE.<br />
Customer Support<br />
• Visit our Web site at www.leadtek.com.tw.<br />
• For support via e-mail, submit your question at service@leadtek.com.tw.<br />
Leadtek Research Inc. 18F, 166, Chien-Yi Rd., Chung Ho, Taipei Hsien, Taiwan (235)<br />
Telephone: +886-(0)2 8226 5800<br />
Fax: +886-(0)2 8226 3087<br />
gpssales@leadtek.com.tw<br />
gpsfae@leadtek.com.tw<br />
Leadtek Research USA<br />
910 Auburn Ct. Fremont, CA 94538, USA<br />
Telephone: +510 490 8076, ext. 206<br />
Fax: +510 490 7759<br />
gps@leadtek.com<br />
Leadtek Research Europe BV<br />
Sloterweg 305, 1171 VC Badhoevedorp – The Netherlands<br />
Telephone: +31 (0)20 4 109 100<br />
Fax: +31 (0)20 4 109 111<br />
gps_sales@leadtek.nl<br />
gps@leadtek.nl
Revision History:<br />
Revision Release Date Issuer Change Description<br />
1.3 2006/03/13 J. Lu Update new reel tapping package drawing and ordering info.<br />
1.4 2006/03/21 J. Lu Update Block Diagram and U.S. contact info. Corrected<br />
mechanical drawing and PCB layout drawing.<br />
i
Contents<br />
INTRODUCTION..........................................................................................................................1<br />
FEATURES .....................................................................................................................................1<br />
Hardware and Software ...........................................................................................................1<br />
Performance.............................................................................................................................1<br />
<strong>Interface</strong> ...................................................................................................................................1<br />
ADVANTAGES................................................................................................................................1<br />
RECOMMENDED DESIGN................................................................................................................2<br />
SPECIFICATIONS........................................................................................................................3<br />
TECHNICAL SPECIFICATIONS .........................................................................................................3<br />
ENVIRONMENTAL CHARACTERISTICS............................................................................................4<br />
PHYSICAL CHARACTERISTICS........................................................................................................4<br />
INTERFACE SPECIFICATIONS..........................................................................................................4<br />
SOFTWARE ...................................................................................................................................5<br />
SIRF GSW3 ..................................................................................................................................5<br />
Options .....................................................................................................................................5<br />
TTFF PERFORMANCE....................................................................................................................6<br />
Test Setup .................................................................................................................................6<br />
Leadtek LR9805-III TTFF Test Results....................................................................................7<br />
ELECTRICAL SPECIFICATIONS.............................................................................................9<br />
BLOCK DIAGRAM ..........................................................................................................................9<br />
ABSOLUTE MAXIMUM RATINGS....................................................................................................9<br />
OPERATING CONDITIONS...............................................................................................................9<br />
BACKUP BATTERY CONDITIONS....................................................................................................9<br />
DC CHARACTERISTICS ................................................................................................................10<br />
INTERFACE SPECIFICATION................................................................................................11<br />
PHOTOS AND PIN POSITIONS........................................................................................................11<br />
PIN SETTINGS ..............................................................................................................................11<br />
PIN FUNCTIONS ...........................................................................................................................12<br />
Pin Name................................................................................................................................12<br />
Description.............................................................................................................................12<br />
BACKUP BATTERY DESIGN..........................................................................................................13<br />
Reference Design....................................................................................................................13<br />
MECHANICAL DIMENSIONS.................................................................................................14<br />
OUTLINE DRAWING.....................................................................................................................14<br />
RECOMMENDED PCB LAYOUT....................................................................................................15<br />
STRIP LINE LAYOUT....................................................................................................................16<br />
REFLOW PROFILE ........................................................................................................................16<br />
AUTOMATED MANUFACTURING COMPONENTS ...........................................................................17<br />
Reel Taping Specification ......................................................................................................17<br />
Polystyrene Alloy Taping <strong>Specifications</strong>................................................................................18<br />
Ordering Information.............................................................................................................18<br />
ii
APPENDIX A ...............................................................................................................................19<br />
SOFTWARE OPTIONS....................................................................................................................19<br />
Trickle Power Mode...............................................................................................................19<br />
Push-to-Fix Mode...................................................................................................................19<br />
Average Current for GPSCLK Trickle Power, 200msec On Time.........................................20<br />
Item.........................................................................................................................................20<br />
Dead Reckoning .....................................................................................................................20<br />
SiRFLoc A-GPS Client Software............................................................................................21<br />
GMonitor Software.................................................................................................................21<br />
GLOSSARY..................................................................................................................................22<br />
iii
LR9805-III GPS Module<br />
Introduction<br />
The Leadtek LR9805-III GPS module is a high sensitivity, low power, Surface Mount Device (SMD).<br />
This 20-channel global positioning system (GPS) receiver is designed for a broad spectrum of OEM<br />
applications and is based on the fast and deep GPS signal search capabilities of SiRFstarIII<br />
architecture. Leadtek LR9805-III is designed to allow quick and easy integration into<br />
GPS-related applications such as:<br />
• PDA, Pocket PC, and other computing devices<br />
• Car and Marine Navigation<br />
• Fleet Management /Asset Tracking<br />
• Automatic Vehicle Location (AVL) and Location-Based Services<br />
• Hand-Held Device for Personal Positioning and Navigation<br />
Features<br />
Hardware and Software<br />
• Based on the high performance features of the SiRFstarIII chipset<br />
• Compact module size for easy integration: 24x20x2.6 mm (0.94x0.79x0.10 in).<br />
• Fully automatic assembly: reflow solder assembly ready<br />
• Hardware compatible with SiRF GSWS 3 software<br />
• Multiple I/O pins reserved for customizing special user applications<br />
Performance<br />
• Cold/Warm/Hot Start Time: 42/38/8 Seconds for standard software under open-sky environment.<br />
• Reacquisition Time: 0.1 second.<br />
• RF Metal Shield for best performance in noisy environments.<br />
• Multi-path Mitigation Hardware.<br />
<strong>Interface</strong><br />
• TTL level serial port for GPS communications interface<br />
• Protocol: NMEA-0183/SiRF Binary (default NMEA).<br />
• Baud Rate: User configurable from 4800 to 57600 baud (default 4800).<br />
• External command programmability<br />
Advantages<br />
• Ideal for high volume mass production<br />
• Cost saving through elimination of RF and board to board digital connectors<br />
• Flexible and cost effective hardware design for different application needs<br />
• Secure SMD PCB mounting method<br />
1
LR9805-III GPS Module<br />
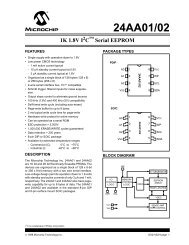
Recommended Design<br />
The Leadtek LR9805-III supports signal detection using an external active antenna. For optimum<br />
performance, Leadtek recommends that you use a 3.3V external active antenna with a built-in filter<br />
inside.<br />
The following diagram illustrates the recommended design for the LR9805-III using an active antenna<br />
and optional backup battery. For more information on the backup battery, see page 13.<br />
Active antenna<br />
3.3V antenna<br />
9805-III<br />
Backup<br />
Battery<br />
For more information or to order GPS related products, contact the Leadtek sales team at<br />
gps@leadtek.com.<br />
2
<strong>Specifications</strong><br />
LR9805-III GPS Module<br />
Technical <strong>Specifications</strong><br />
Feature Item Description<br />
Chipset GSP3F Series SiRFstarIII technology<br />
General<br />
Frequency L1, 1575.42 MHz<br />
C/A code<br />
1.023 MHz chip rate<br />
Channels 20<br />
Accuracy<br />
Position<br />
10 meters, 2D RMS<br />
5 meters 2D RMS, WAAS corrected<br />
LR9805-III GPS Module<br />
Environmental Characteristics<br />
Items<br />
Operating temperature range<br />
Storage temperature range<br />
Description<br />
-40 deg. C to +85 deg. C<br />
-55 deg. C to +100 deg. C<br />
Physical Characteristics<br />
Items<br />
Description<br />
Length<br />
24 mm (0.94in)<br />
Width<br />
20 mm (0.79 in)<br />
Height<br />
2.6 mm (0.1 in)<br />
Weight 2.5g<br />
<strong>Interface</strong> <strong>Specifications</strong><br />
Items<br />
I/O<br />
Description<br />
28 pin SMD micro package<br />
4
Software<br />
LR9805-III GPS Module<br />
SiRF GSW3<br />
The Leadtek LR9805-III module includes GSW3, the SiRF standard GPS software for SiRFstarIII<br />
receivers. Features include:<br />
• Excellent sensitivity<br />
• High configurability<br />
• 1-second position update rate<br />
• Supports use of satellite-based augmentation systems like the US WAAS or European EGNOS<br />
system<br />
• API compatible with GSW2 and SiRFLoc Client AGPS support<br />
• Real-time Operating System (RTOS) friendly<br />
• Capable of outputting both NMEA and SiRF-proprietary binary protocols<br />
• Designed to accept custom user tasks executed on the integrated ARM7TDM1 processor<br />
• Runs in full power operation or optional power saving modes (see page 19)<br />
GSW default configuration is as follows:<br />
Item<br />
Description<br />
Core of firmware SiRF GSW3<br />
Baud rate 4800<br />
Code type<br />
NMEA-0183 ASCII<br />
Datum<br />
WGS-84<br />
Protocol message GGA(1sec), GSA(5sec), GSV(5sec),<br />
RMC(1sec),VTG(1sec)<br />
Output frequency 1 Hz<br />
Acquisition Sensitivity Cold start<br />
30 dB-Hz (-143dBm)<br />
Warm start<br />
23 dB-Hz<br />
Hot start (<strong>Standard</strong>) 15 dB-Hz<br />
Tracking<br />
13 dB-Hz<br />
Options<br />
GSW3 software provides optional features when you require lower power consumption. These<br />
features include two optional power saving modes:<br />
• Trickle Power<br />
• Push-to-Fix<br />
For more information on these and other options, see page 19.<br />
5
LR9805-III GPS Module<br />
TTFF Performance<br />
Test Setup<br />
To ensure consistent test results, the multi-channel GPS simulator is used with a signal attenuator to<br />
generate different signal strengths for the LR9805-III module. The generated signals are used to test<br />
the module’s TTFF and the tests are performed inside a noise-free chamber. See pages 7 and 8 for test<br />
results.<br />
6
LR9805-III GPS Module<br />
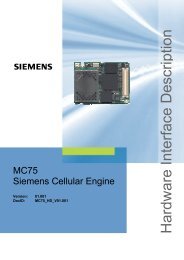
Leadtek LR9805-III TTFF Test Results<br />
The following are TTFF test results using GSW3 software.<br />
Cold Start<br />
Time or location is unknown or hot or warm start failed. The following chart shows the Cold Start time<br />
in different signal strengths.<br />
Cold Start<br />
Time [Second]<br />
65<br />
60<br />
55<br />
50<br />
45<br />
40<br />
35<br />
30<br />
30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48<br />
CN<br />
UNIT:Second<br />
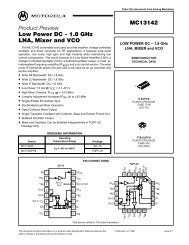
Warm Start<br />
Time, location, and satellite almanac are available. The receiver has been powered off for more than<br />
two hours. The following chart shows the Warm Start time in different signal strengths.<br />
Warm Start<br />
55<br />
50<br />
Time [Second]<br />
45<br />
40<br />
35<br />
30<br />
26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48<br />
CN<br />
UNIT:Second<br />
7
LR9805-III GPS Module<br />
Snap Start<br />
Time, location, and satellite ephemeris are available. The receiver has been powered off for less than<br />
three minutes. Since last power-off, RTC is good. The following chart shows the Warm Start time in<br />
different signal strengths.<br />
Snap Start<br />
Time [Second]<br />
20<br />
19<br />
18<br />
17<br />
16<br />
15<br />
14<br />
13<br />
12<br />
11<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48<br />
CN<br />
UNIT:Second<br />
Hot Start<br />
Time, location, and satellite ephemeris are available. The receiver has been powered off for more than<br />
three minutes, but less than two hours. The following chart shows the Warm Start time in different<br />
signal strengths.<br />
Hot Start<br />
5<br />
Time [Second]<br />
4<br />
3<br />
2<br />
1<br />
0<br />
23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48<br />
CN<br />
UNIT:Second<br />
8
Electrical <strong>Specifications</strong><br />
LR9805-III GPS Module<br />
Block Diagram<br />
RF Input<br />
GRF3W<br />
GSP 3F<br />
TTL<br />
Regulator<br />
IC<br />
TCXO<br />
Reset<br />
IC<br />
Flash<br />
ROM<br />
RTC<br />
X-tal<br />
LR9805-III-GPS Module<br />
Absolute Maximum Ratings<br />
Parameter Symbol Min Max Units<br />
Power Supply Voltage VCC_3V -0.3 3.6 V<br />
Input Pin Voltage VIN -0.3 5 V<br />
Output Pin Voltage VOUT -0.3 3.6 V<br />
Storage Temperature TSTG -55 100 ºC<br />
Operating Conditions<br />
Parameter Symbol Min Typical Max Units<br />
Power Supply Voltage VCC_3V 3.2 3.3 3.4 V<br />
Input Pin Voltage VIN 0 3.3 V<br />
Operating Temperature TOPR -40 85 ºC<br />
Operating Current ICC 65 65 70 mA<br />
Backup Battery Conditions<br />
Parameter Symbol Min Typical Max Units<br />
RTC(Battery) Power VSTBY 1.425 1.5 1.575 V<br />
Supply Current 10 µA<br />
9
LR9805-III GPS Module<br />
DC Characteristics<br />
Parameter Symbol Min Max Units<br />
Input High Level Vih 2.0 ---- V<br />
Input Low Level Vil ---- 0.8 V<br />
Output High Level Voh 2.4 V<br />
Out Low Level Vol 0.4 V<br />
Input Leakage li 2 2 µA<br />
Current<br />
Input Capacitance 3 pF<br />
Output Capacitance 3 pF<br />
Bi-directional Buffer<br />
Capacitance<br />
3 pF<br />
10
<strong>Interface</strong> Specification<br />
Photos and Pin Positions<br />
Pin 28<br />
Pin 15<br />
LR9805-III GPS Module<br />
Model number<br />
Serial number<br />
Pin Settings<br />
Pin 1 Pin 14<br />
PIN Name Type Description<br />
1 FREQ_XFER I If not used, keep floating<br />
2 NC I/O Not connected<br />
3 NC I/O Not connected<br />
4 RXDB I TTL UART Port B input. If not used, keep floating<br />
5 RXDA I TTL UART Port A input<br />
6 TXDA O TTL UART Port A output<br />
7 GPIO5 I/O Reserved, keep floating<br />
8 TIMEMARK I/O 1 PPS timemark output<br />
9 NC I/O Not connected<br />
10 GPIO13 I/O Reserved, keep floating<br />
11 GPIO0 I/O Reserved, keep floating<br />
12 GPIO1 I/O Reserved, keep floating<br />
13 GPIO14 I/O Reserved, keep floating<br />
14 GND PWR Ground<br />
15 VCC_IN PWR 3.3V supply input<br />
16 VSTBY PWR<br />
Apply 1.5V DC for backup RTC & SRAM. If not used, keep<br />
floating<br />
17 BOOTSEL I Pull high for programming mode. If not used, keep floating<br />
18 PBRESN I Reset pin, active low, If not used, keep floating<br />
19 GPIO15 I/O Reserved, keep floating<br />
20 GND PWR Ground<br />
21 NC I/O Not connected<br />
22 NC I/O Not connected<br />
23 TXDB O TTL UART Port B output. If not used, keep floating<br />
24 NC O Not connected<br />
25 ANTPWR PWR Antenna power input<br />
26 GND PWR Ground<br />
27 RFIN I RF Signal input<br />
28 GND PWR Ground<br />
11
Pin Functions<br />
Pin Name<br />
VCC_IN<br />
GND<br />
RXDA<br />
TXDA<br />
RXDB<br />
TXDB<br />
PBRESN<br />
TIMEMARK<br />
GPIO<br />
VSTBY<br />
BOOTSEL<br />
ANTPWR<br />
FREQ_XFER<br />
RFIN<br />
LR9805-III GPS Module<br />
Description<br />
+3.3V power input.<br />
LR9805-III ground<br />
Serial input of Channel A (TTTL Level)<br />
Serial output of Channel A (TTTL Level)<br />
Serial input of Channel B (TTTL Level)<br />
Serial output of Channel B (TTTL Level)<br />
Provides active-low reset input to the board. Causes board to reset and start<br />
searching for satellites. PB Reset is an optional input and, if not utilized, it may<br />
be left open.<br />
1 PPS timemark output<br />
Reserved<br />
Battery backup supply reserved input<br />
Upgrading firmware, this pin should be active high<br />
Active antenna supply<br />
External clock input for SiRFLoc. See pg. 21 for more information.<br />
GPS RF signal input<br />
12
LR9805-III GPS Module<br />
Backup Battery Design<br />
The backup battery provides power for the RTC and SRAM. Leadtek recommends that you use a<br />
battery backup to retain the data saved in SRAM when the VCC has been removed to ensure the<br />
continuous running of the RTC. With this feature, you do not have to wait for the cold start time to get<br />
a fix. If the information is saved in the SRAM, the satellite data will remain available for future access.<br />
The power input of the backup battery is 1.425V-1.575V through VSTBY. See page 11 for the pin<br />
setting.<br />
In the following reference design, a rechargeable backup battery is used with a voltage regulator.<br />
Reference Design<br />
Regulator<br />
1.5V<br />
To VSTBY (Pin 16)<br />
13
Mechanical Dimensions<br />
LR9805-III GPS Module<br />
Outline Drawing<br />
(Unit : mm)<br />
14
LR9805-III GPS Module<br />
Recommended PCB Layout<br />
(Unit : mm)<br />
15
LR9805-III GPS Module<br />
Strip Line Layout<br />
The main purpose of the strip line is to reduce the impact due to impedance mismatch from return loss<br />
and propagation delay. The impedance of the strip line between the RF connector and<br />
LR9805-III (pin 27, RF_IN) must be maintained at 50 ohms.<br />
Reflow Profile<br />
High quality, low defect soldering requires identifying the optimum temperature profile for reflowing<br />
the solder paste. To have the correct profile assures components, boards, and solder joints are not<br />
damaged and reliable solder connection is achievable. Profiles are essential for establishing and<br />
maintaining processes. You must be able to repeat the profile to achieve process consistency. The<br />
heating and cooling rise rates must be compatible with the solder paste and components. The amount<br />
of time that the assembly is exposed to certain temperatures must first be defined and then maintained.<br />
The following is an example of a typical thermal profile.<br />
Peak Temperature<br />
Rate of<br />
Rise<br />
Wetting Time<br />
Preheat<br />
Dryout<br />
Reflow<br />
Cooling<br />
Notes<br />
• The equilibrium time can be adjusted to ensure that the out gassing of the flux is optimized<br />
• The equilibrium time can be increased if there is excessive voiding at PCB level<br />
• Solder composition: Sn 63%, Pb 37%<br />
Important features of profile<br />
• Initial Ramp = 60° C to 120° C/minute to 140°C to 150° equilibrium<br />
• Ramp to Maximum temperature (210°C to 215°) = 90°C to 120° C/minute<br />
• Time over liquids = 40 to 90 seconds<br />
16
LR9805-III GPS Module<br />
Automated Manufacturing Components<br />
Reel Taping Specification<br />
• Material: Black Conductive High Impact Polystyrene Alloy (UP-6100)<br />
• Surface resistivity 10 9 – 10 12 Ω/□<br />
• Quantity per reel: 1000 pcs./reel<br />
(Unit : mm)<br />
Tape Reel Drawing<br />
17
LR9805-III GPS Module<br />
Polystyrene Alloy Taping <strong>Specifications</strong><br />
• 10 sprocket hole pitch cumulative tolerance ±0.20mm<br />
• Carrier camber is within 1mm in 250mm<br />
• A0 and B0 measured on a plane 0.3mm above the bottom of the pocket<br />
• K0 measured from a plane on the inside bottom of the pocket to the top surface of the carrier<br />
• Material: black anti-static polystyrene alloy<br />
• All dimensions meet EIA-481-3 requirements<br />
• Thickness: 0.50±0.05cm<br />
• Packing length per 22” reel: 50.0 Meters (1:2)<br />
• Component load per 15” reel: 1000 pcs. (SUR-56-3-XL)<br />
Polystyrene Alloy Taping Drawing<br />
Ordering Information<br />
For every order of 1000 pcs , Leadtek will ship the modules with the reel package (shown on page 17).<br />
For order quantities less than 1000 pcs, or when ordering non-whole numbers, Leadtek will snip the<br />
taping and ship the quantity that you request without the reel.<br />
To place an order, contact gps@leadtek.com.<br />
18
LR9805-III GPS Module<br />
Appendix A<br />
Software Options<br />
Trickle Power Mode<br />
The LR9805-III design includes all the functionality necessary to implement the SiRF Trickle<br />
Power mode of operation. In this mode, the lowest average power dissipation is achieved by<br />
powering down the board (after a position is determined) in such a manner that when it is turned back<br />
on it can recompute a position fix in the shortest amount of time. <strong>Standard</strong> Trickle Power operates in<br />
these states:<br />
• Tracking State<br />
In this state, the board is fully powered, tracking satellites, and gathering data.<br />
• CPU State<br />
In this mode, the GPS radio frequency (RF) front end can be partially powered down at the end of<br />
the tracking state through pin control. This mode allows the continued output of the clock to the<br />
baseband chip, while powering down all other internal RF circuits in the GPS RF front end. The<br />
CPU would keep running to process the GPS data until a position fix is determined and the result<br />
has been transmitted by the serial communication interface.<br />
• Trickle State<br />
At the end of the CPU state, the entire RF section is shutdown completely through control of the<br />
RF voltage regulator shutdown pin. In this state, the CPU is in a low power standby state and the<br />
receiver clocks are off with only the RTC clock active. After a set amount of time, the RTC<br />
generates a NMI signal to wake up the CPU and reset the receiver back to the tracking state.<br />
Push-to-Fix Mode<br />
The Push-to-Fix mode puts the receiver into a background duty cycle function that provides a periodic<br />
refresh of position, GPS time, ephemeris data, and RTC calibration every 30 minutes. The Push-to-Fix<br />
mode is similar but exclusive from the Trickle Power mode, meaning that only one mode can be set at<br />
a time. The purpose of the Push-to-Fix mode is to support applications where a position fix is only<br />
required when you request it, or the application requests it. The Push-to-Fix mode puts the receiver in<br />
the Trickle state until commanded to generate a fix. Push-to-Fix operates in these states:<br />
• Power-on State<br />
In this state the receiver calculates the position once, collects the ephemeris, and calibrates the<br />
RTC before going back to the Trickle state.<br />
• Trickle State<br />
In this state only the RTC is running. The supply current is typically less than 500uA, which<br />
includes the standby current of the baseband IC.<br />
There are three events that can happen, which effectively return the CPU to normal operation:<br />
• Power-on: If power is removed then re-applied to the board, a reset signal is generated by the<br />
CPU supervisor. After the reset has been removed, the CPU will start up, get a fix and return to<br />
Trickle state. This typically takes two to six seconds.<br />
19
LR9805-III GPS Module<br />
• Ephemeris Collection: Every 30 minutes the receiver wakes up the CPU to calculate a fix,<br />
collect a new ephemeris, calibrate the RTC, and then go to the Trickle State.<br />
• User Requested Fix: When you request of a fix, the CPU will wake up by toggling PBRES<br />
low (interface pin 18). The CPU is restarted and (following a Snap Start) a fix is calculated.<br />
Before going back to the Trickle State, the CPU will check the ephemeris and the RTC<br />
calibration.<br />
Note: The CPU will restart within 200-600 ms after the PBRES input is brought high.<br />
Average Current for GPSCLK Trickle Power, 200msec On Time<br />
Item Current(mA) Time (ms)<br />
Update Period 1 --- 1080 6000 10080<br />
Tracking State 73 280 280 280<br />
CPU State 2 41.5 260 260 260<br />
Sat Positioning 3 41.5 600 700 700<br />
Trickle State 4 3.4 540 4760 8840<br />
Average Current (mA) --- 30.6 12.7 9<br />
Average Power (mW) --- 101 41.9 29.7<br />
Dead Reckoning<br />
SiRFDRive is a closely coupled Dead Reckoning option that can be supported by Leadtek LR9805-III.<br />
This option allows the navigation system to accept inputs from low cost heading rate sensors and<br />
vehicle speed wheel ticks in order to compute dead reckoning positions when GPS signals are blocked<br />
or degraded.<br />
With SiRFDrive, the dead reckoning information is incorporated into the main navigation software<br />
filter through patented close coupling algorithms, instead of functioning independently from the GPS<br />
part of the system. This improves accuracy and reliability of position fixes. GPS measurements<br />
calibrate the dead reckoning sensors to ensure optimum speed and heading accuracy. Dead reckoning<br />
measurements validate and correct GPS fixes during signal blockage and multi-path providing you<br />
with navigation that is continuous and reliable.<br />
Contact your SiRF representative directly for more information about this feature.<br />
1 Update Period is greater than programmed value by approximately 80-100 ms.<br />
2 With all development data messages turned on the CPU state time increases.<br />
3 Satellite positioning task occurs during CPU state once per 6 second interval. With one second update interval, the<br />
satellite positioning task takes about 100 ms less, since it uses the available throughput during the following task state.<br />
4 Total Trickle state time computed over a 6 second interval for 1000 and 6000 ms update period and over 10 second<br />
interval for 10000 ms update period.<br />
20
LR9805-III GPS Module<br />
SiRFLoc A-GPS Client Software<br />
Leadtek LR9805-III with TCXO design supports SiRFLoc MultiMode Aided-GPS (A-GPS)<br />
technology for Location Based Service (LBS) applications. The MultiMode A-GPS software supports<br />
multiple positioning methods and is adaptable to work with aid available on the network. Contact your<br />
SiRF representative directly if you want to use LR9805-III with SiRFLoc Client, together with<br />
SiRFLoc Server for a complete end-to-end A-GPS solution.<br />
GMonitor Software<br />
GMonitor is a software program used to test and view performance of GPS receivers. It is used with<br />
Leadtek evaluation kits (EVKIII) to test SMD module performance. For more information about<br />
GMonitor, see the GMonitor User’s Guide.<br />
21
Glossary<br />
LR9805-III GPS Module<br />
A-GPS<br />
Assisted GPS or AGPS is a technology that uses an assistance server to cut down the time needed to<br />
find the location. Although GPS provides excellent position accuracy, position fixes require lines of<br />
sight to the satellites. In regular GPS networks there are only GPS satellites and GPS receivers.<br />
In A-GPS networks, the receiver, being limited in processing power and normally under less than ideal<br />
locations for position fixing, communicates with the assistance server that has high processing power<br />
and access to a reference network. Although dependent on cellular coverage, AGPS processing is<br />
quicker and more efficient than regular GPS.<br />
API<br />
An application programming interface is a set of definitions of the way one piece of computer software<br />
communicates with another. One of the primary purposes of an API is to provide a set of commonly<br />
used functions, such as to draw windows or icons on the screen. Programmers can then take advantage<br />
of the API by making use of its functionality, saving them the task of programming everything from<br />
scratch.<br />
Baud Rate<br />
Is a measure of the signaling rate, which is the number of changes to the transmission media per<br />
second in a modulated signal.<br />
For Example: 250 baud means that 250 signals are transmitted in one second. If each signal carries 4<br />
bits of information then in each second 1000 bits are transmitted. This is abbreviated as 1000 bit/s.<br />
Dead Reckoning<br />
The process of estimating your position by advancing a known position using course, speed, time and<br />
distance to be traveled. It is figuring out where you will be at a certain time if you hold the speed, time<br />
and course you plan to travel.<br />
Differential GPS (DGPS)<br />
An extension of the GPS system that uses land-based radio beacons to transmit position corrections to<br />
GPS receivers. DGPS reduces the effect of selective availability, propagation delay, etc. and can<br />
improve position accuracy to better than 10 meters.<br />
EGNOS<br />
A satellite navigation system being developed by the European Space Agency, the European<br />
Commission, and EUROCONTROL. It is intended to supplement the GPS and GLONASS systems by<br />
reporting on the reliability and accuracy of the signals. According to specifications, horizontal position<br />
accuracy should be better than 7 meters. In practice, the horizontal position accuracy is at the meter<br />
level. It will consist of three geostationary satellites and a network of ground stations.<br />
Similar service is provided in America by the WAAS system. See WAAS.<br />
22
LR9805-III GPS Module<br />
European Geostationary Navigation Overlay System<br />
See EGNOS.<br />
LNA<br />
A special type of electronic amplifier or amplifier used in communication systems to amplify very<br />
weak signals captured by an antenna. It is usually located at the antenna and is a key component, which<br />
is placed at the front-end of a receiver system.<br />
Low Noise Amplifier<br />
See LNA.<br />
Multi-path mitigation<br />
Anticipating errors caused when a satellite signal reaches the GPS receiver antenna by more than one<br />
path. Usually caused by one or more paths being bounced or reflected off of structures near the<br />
antenna and occurs to some extent everywhere. The signal which traverses a longer path will yield a<br />
larger pseudo range estimate and increase the error.<br />
NMEA<br />
An U.S. standards committee that defines data message structure, contents, and protocols to allow the<br />
GPS receiver to communicate with other pieces of electronic equipment.<br />
National Marine Electronics Association<br />
See NMEA.<br />
1PPS<br />
Pulse which is generated once per second. GPS and some radio clocks and related timekeeping gear<br />
have a pulse-per-second or PPS signal that is needed for high accuracy time synchronization. The PPS<br />
signal can be connected in either of two ways, either through the data leads of a serial port or through<br />
the modem control leads. Either way requires conversion of the PPS signal,<br />
Most GPS devices emit an rs-232 serial stream with some kind of timestamp format. Many GPS<br />
devices are small realtime systems with the satellite tracking done at high priority, positioning done at<br />
medium priority, and time output done at low priority. The timestamps often have +- 200 ms of jitter<br />
(variance in delay), and output a PPS signal on the exact second.<br />
SMD<br />
Electronic device components that are mounted directly onto the surface of printed circuit boards<br />
(PCBs). In the industry it has largely replaced the previous construction method of fitting components<br />
with wire leads into holes in the circuit board (also called through-hole technology).<br />
Surface Mount Device<br />
See SMD.<br />
23
LR9805-III GPS Module<br />
TCXO<br />
An electronic device that uses the mechanical resonance of a physical crystal to create an electrical<br />
signal with a very precise frequency and can be embedded in integrated circuits. TCXO reduces the<br />
environmental changes of temperature, humidity, and vibration, to keep a stable output frequency.<br />
Temperature Controlled Crystal Oscillator<br />
See TCXO.<br />
Time To First Fix (TTFF)<br />
The time it takes a GPS receiver to find satellites after you first turn it on, when the GPS receiver has<br />
lost memory, or has been moved over 300 miles from its last location. <strong>Standard</strong> TTFF Timing consists<br />
of:<br />
Mode Requires Timing<br />
Snap Start Hot + Clock + Sat Pos 3 minutes off<br />
Hot Start Warm + Ephemeris 30 minutes off<br />
Warm Start<br />
Position Accuracy<br />
Time Accuracy<br />
Almanac<br />
Cold Start Nothing N/A<br />
Leadtek Research Inc.<br />
18F, 166, Chien-Yi Rd.,<br />
Chung Ho, Taipei Hsien,<br />
Taiwan (235)<br />
©2006 Leadtek Research, Inc.<br />
All rights reserved.<br />
Version 1.4<br />
3/06